【驱动设计的硬件基础】I²C
作为嵌入式领域最经典的串行通信协议之一,I²C(Inter-Integrated Circuit,集成电路间总线)凭借 “两根线走天下” 的极简设计,成为 90% 以上智能设备的 “数据神经”:手机的加速度传感器、智能手表的心率模块、空调的温湿度探头…… 它们都在通过 I²C 与主控芯片 “对话”。
目录
一、I²C 的 “物理身份证”:两根线走天下
1.1 两根线的 “生存法则”:开漏输出与上拉电阻
1.2 硬件连接的 “潜规则”
二、I²C 的 “聊天剧本”:时序图里的秘密
2.1 起始位(Start)与停止位(Stop):通信的 “开关”
2.2 数据位传输:“高电平读,低电平变”
2.3 应答位(ACK/NACK):“我收到了!”
2.4 完整写操作时序:以 MCU 写入 EEPROM 为例
2.5 完整读操作时序:以 MCU 读取温湿度传感器为例
三、I²C 的 “多主模式”:谁才是总线的 “话事人”?
3.1 仲裁的核心:“线与” 特性的妙用
3.2 仲裁的过程:以两个主设备竞争为例
3.3 仲裁的 3 个关键结论
四、I²C 的 “实战避坑”:常见问题与解决方案
4.1 问题 1:上拉电阻选多大?
4.2 问题 2:总线 “卡住”,无法通信
4.3 问题 3:ACK 错误(接收方不回 ACK)
4.4 问题 4:高频噪声干扰
4.5 问题 5:多主仲裁失败
五、I²C vs 其他协议:为什么选它?
六、总结
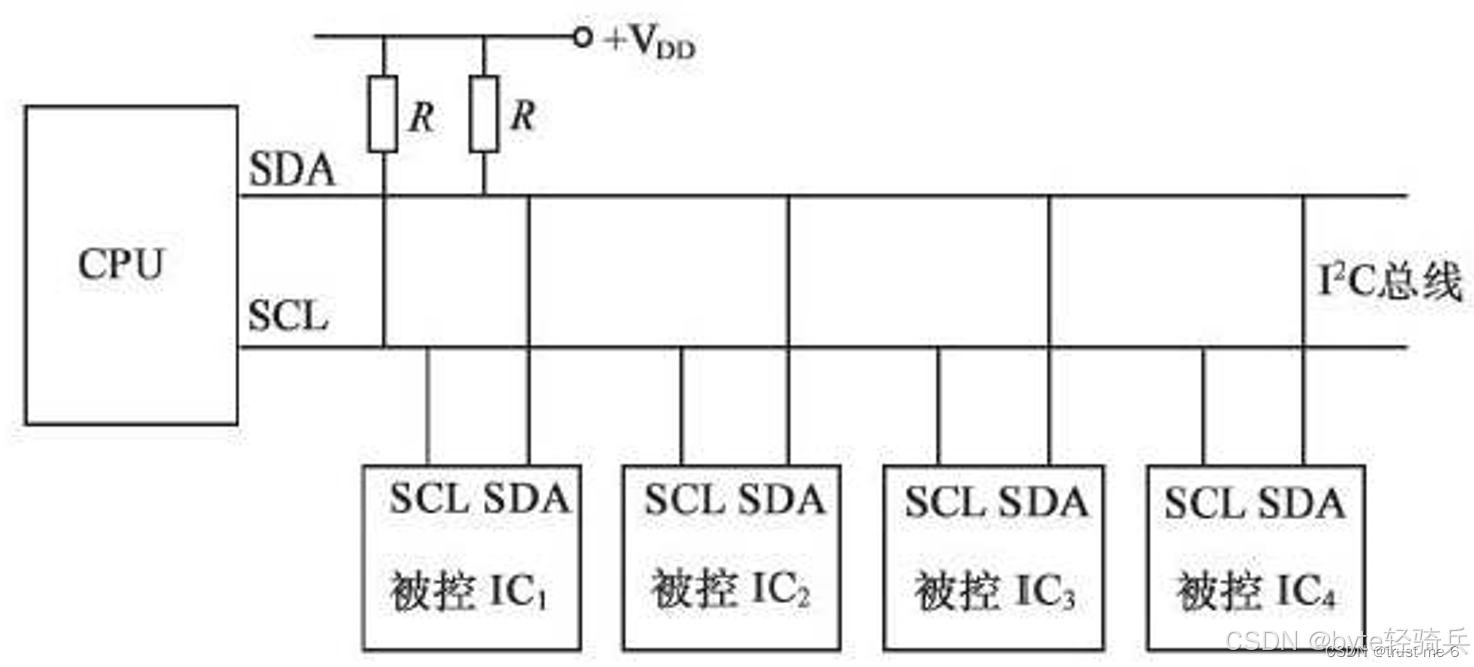
一、I²C 的 “物理身份证”:两根线走天下
I²C 的硬件设计贯彻了 “极简主义”—— 只需要两根线:
- SCL(Serial Clock Line,时钟线):负责 “打拍子”,由主机(Master)掌控节奏。就像开会时的主持人,说 “下一位发言”,大家才敢说话。
- SDA(Serial Data Line,数据线):负责 “传信息”,所有的地址、数据、应答都靠它传递。。SDA 的电平(高 / 低)对应二进制的 “1” 和 “0”。
1.1 两根线的 “生存法则”:开漏输出与上拉电阻
如果你用万用表测量 I²C 设备的 SCL 和 SDA 引脚,会发现一个奇怪现象:它们的高电平不是直接由芯片输出的,而是通过上拉电阻“拉” 上去的。这背后是 I²C 最核心的硬件设计 ——开漏输出(Open Drain)。
①开漏输出的 “能与不能”
开漏输出的 GPIO 引脚就像一个 “只能拉低的开关”:
- 当芯片想发送 “0”(低电平)时,开关闭合,SDA 直接接地(0V);
- 当芯片想发送 “1”(高电平)时,开关断开,SDA 无法自己拉高 —— 此时必须依赖外部的上拉电阻(通常 4.7kΩ 或 10kΩ)将 SDA “拽” 到电源电平(如 3.3V 或 5V)。
②为什么必须用开漏输出?
这要从 I²C 的 “多设备并联” 特性说起:所有 I²C 设备的 SCL 和 SDA 都连在一起。如果某个设备的 SDA 引脚是 “推挽输出”(能主动拉高或拉低),当两个设备同时发送不同电平(比如一个发 “1”,一个发 “0”),就会形成 “短路”,可能烧毁芯片。
而开漏输出 + 上拉电阻的组合完美解决了这个问题:
- 当多个设备同时发送 “1”(开关断开),上拉电阻将 SDA 拉高;
- 当任意一个设备发送 “0”(开关闭合),SDA 被拉低;
- 这种 “线与” 特性(逻辑与)是 I²C 实现多主仲裁的基础(后文详细讲)。
举个栗子:当两个设备同时连在 SDA 线上,A 设备想发 “1”(高电平),B 设备想发 “0”(低电平)—— 这时候 SDA 线会被 B 设备拉低,最终结果是 “0”。这种 “线与” 特性,正是 I²C 实现多主仲裁的关键(后面会讲)。
1.2 硬件连接的 “潜规则”
I²C 的硬件连接看似简单,实则有很多 “隐藏规则”,不注意就会踩坑:
①多设备并联:地址是唯一 “身份证”
所有 I²C 设备的 SCL 和 SDA 必须并联,但每个设备必须有唯一的 7 位或 10 位地址(7 位最常见)。例如,常见的温湿度传感器 SHT30 的默认地址是 0x44,OLED 屏幕 SSD1306 的地址是 0x3C。
小知识:7 位地址的最高位是 “通用调用位”(0),用于广播指令(如所有设备复位);10 位地址可扩展到更多设备,但需要额外的地址匹配逻辑。
②总线电容:长度限制的本质
I²C 总线的长度不能超过 1 米(标准模式),这不是因为导线电阻,而是总线电容—— 导线、芯片引脚的寄生电容会影响 SDA/SCL 的上升时间(从低到高的时间)。
根据 I²C 规范,总线总电容不能超过 400pF(包括所有设备的引脚电容和导线电容)。如果电容过大,SDA 的上升沿会变 “缓”,导致接收方误判信号(比如把 “1” 读成 “0”)。
③电平兼容:跨电压通信的秘诀
I²C 支持不同电压的设备(如 3.3V 和 5V)通信,关键是高电平的 “识别门槛”:
- 3.3V 设备的 SDA 高电平是 3.3V,5V 设备只要认为 “2V 以上都是 1”,就能正确接收;
- 低电压设备(3.3V)接收 5V 信号时,必须确保 IO 口耐 5V(如 STM32 的部分 GPIO 支持),否则需要加电平转换芯片(如 PCA9306)。
二、I²C 的 “聊天剧本”:时序图里的秘密
I²C 的通信是 “同步通信”,所有数据传输都由 SCL 的时钟信号驱动。要理解 I²C,必须看懂它的时序图—— 这是芯片们的 “聊天规则”。
2.1 起始位(Start)与停止位(Stop):通信的 “开关”
通信的开始和结束由两个特殊信号控制,它们是 I²C 时序的 “定场诗”。
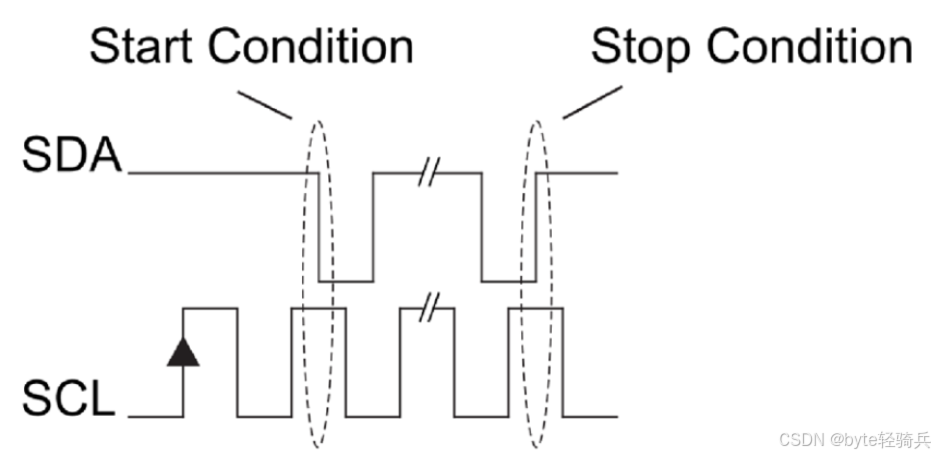
①起始位(S)
- 条件:SCL 保持高电平期间,SDA 从高电平跳变到低电平。
- 含义:“我要开始通信了!” 主设备通过起始位宣布 “占用总线”。
②停止位(P)
- 条件:SCL 保持高电平期间,SDA 从低电平跳变到高电平。
- 含义:“通信结束!” 主设备通过停止位释放总线,其他设备可以竞争。
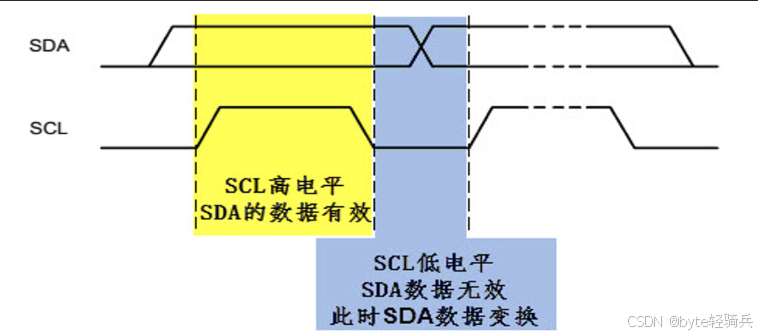
2.2 数据位传输:“高电平读,低电平变”
I²C 的每个数据位(0 或 1)的传输严格遵循 “高电平读,低电平变” 的规则:
① 数据准备(SCL 低电平)
发送方在 SCL 低电平期间更新 SDA 的值(从 0 变 1 或 1 变 0)。此时接收方 “不看” SDA,因为数据可能还没稳定。
② 数据读取(SCL 高电平)
SCL 变高电平后,发送方保持 SDA 稳定(不能跳变),接收方在此时读取 SDA 的值(高 = 1,低 = 0)。
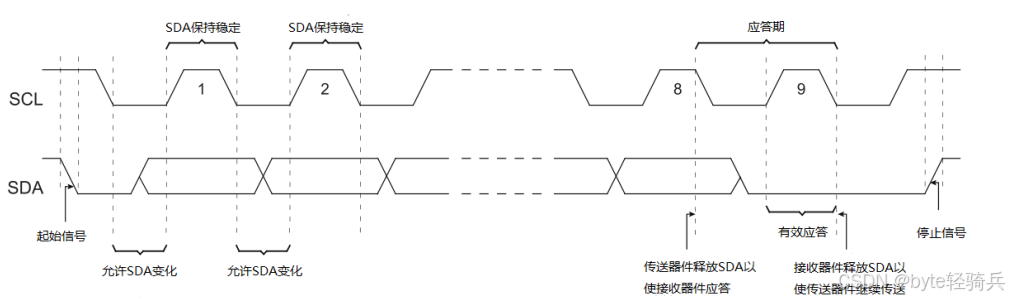
2.3 应答位(ACK/NACK):“我收到了!”
每传输完 8 位数据(一个字节),接收方必须通过应答位告诉发送方 “是否成功接收”:
①应答位(ACK)
- 条件:接收方在第 9 个 SCL 周期(即第 8 位数据传输完成后)拉低 SDA(低电平)。
- 含义:“数据已接收,请继续发送!”
②非应答位(NACK)
- 条件:接收方在第 9 个 SCL 周期保持 SDA 高电平。
- 含义:“数据未接收(可能错误或不需要),请停止发送!”
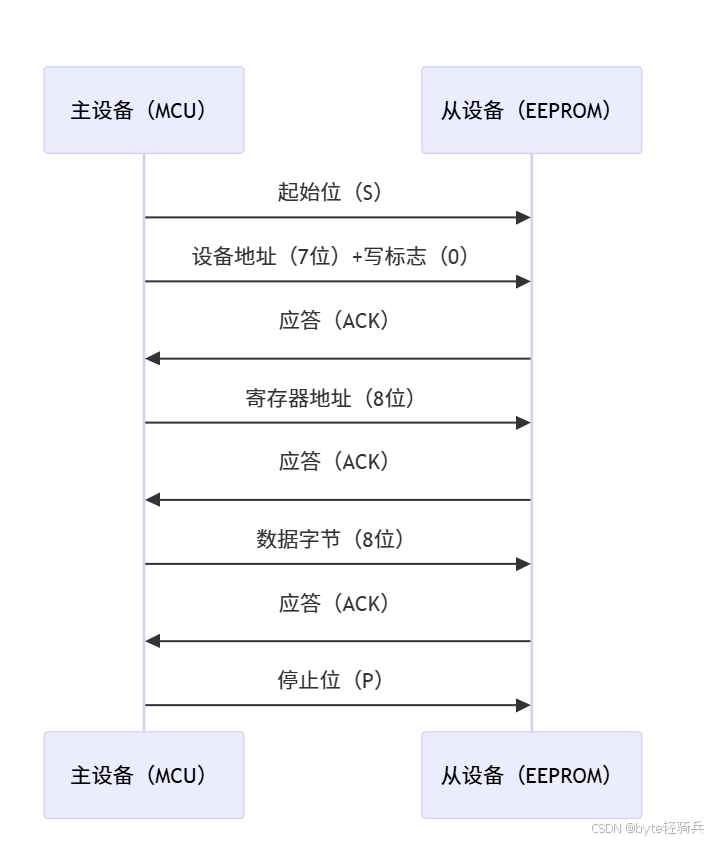
2.4 完整写操作时序:以 MCU 写入 EEPROM 为例
写操作是 I²C 最常见的场景(如向传感器发送配置指令、向存储芯片写入数据)。我们以 “MCU 向 EEPROM 写入一个字节” 为例,拆解完整时序:
步骤详解:
- 起始位(S):主设备(MCU)拉低 SDA,宣布开始通信;
- 设备地址 + 写标志(7 位地址 + 1 位 0):主设备发送从机地址(如 0x50),最后一位是 “写标志”(0 表示写操作);
- 从机应答(ACK):EEPROM 收到地址后,拉低 SDA 表示 “我在”;
- 寄存器地址(8 位):主设备发送目标存储地址(如 0x00);
- 从机应答(ACK):EEPROM 确认地址有效;
- 数据字节(8 位):主设备发送要写入的数据(如 0x55);
- 从机应答(ACK):EEPROM 确认数据接收;
- 停止位(P):主设备拉高 SDA,结束通信。
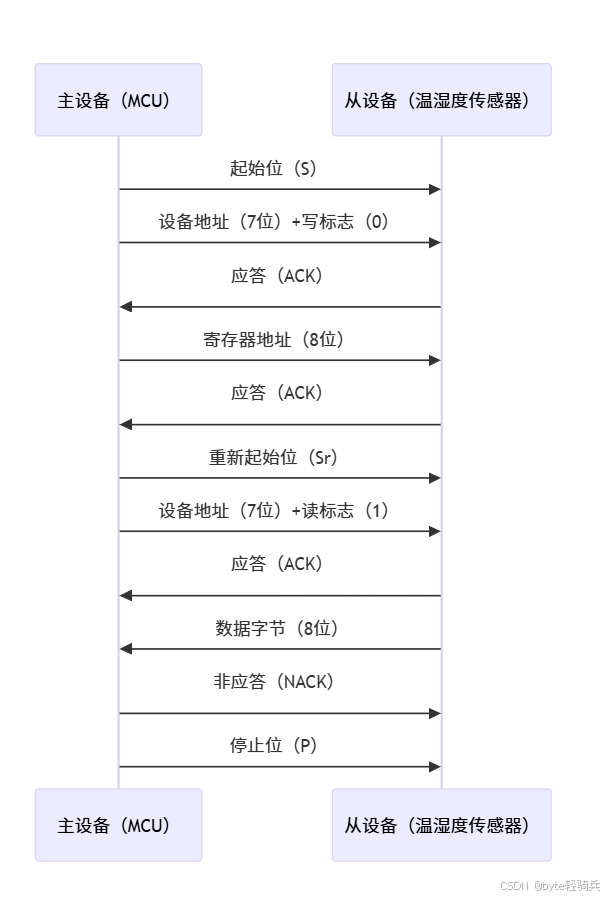
2.5 完整读操作时序:以 MCU 读取温湿度传感器为例
读操作比写操作复杂,因为需要 “切换角色”—— 主设备先告诉从机 “我要读”,然后从机变成 “发送方”:
步骤详解
- 起始位(S):主设备开始通信;
- 设备地址 + 写标志(0):主设备发送从机地址(如 0x44),告诉从机 “我要配置”;
- 从机应答(ACK):传感器确认;
- 寄存器地址(8 位):主设备发送目标寄存器地址(如 0x00,温湿度数据寄存器);
- 从机应答(ACK):传感器确认地址;
- 重新起始位(Sr):主设备再次拉低 SDA(不释放总线),切换到读模式;
- 设备地址 + 读标志(1):主设备发送从机地址,最后一位是 “读标志”(1 表示读操作);
- 从机应答(ACK):传感器确认;
- 从机发送数据(8 位):传感器将温湿度数据通过 SDA 发送;
- 主设备发送 NACK:主设备拉高 SDA(表示 “已接收,停止发送”);
- 停止位(P):主设备结束通信。
三、I²C 的 “多主模式”:谁才是总线的 “话事人”?
I²C 支持 “多主设备”(如两个 MCU 同时连接总线),但必须解决 “抢总线” 的问题 —— 这就是仲裁机制(Arbitration)。
3.1 仲裁的核心:“线与” 特性的妙用
前面提到,SDA 是开漏输出 + 上拉电阻,多个设备同时发送数据时,SDA 的实际电平是所有发送方的 “逻辑与”。例如:
- 主设备 A 发送 “1”(SDA 高),主设备 B 发送 “0”(SDA 低)→ SDA 最终是低;
- 主设备 A 发现自己发送的 “1” 与实际 SDA 的 “0” 不一致,就知道 “自己输了”,主动退出总线。
3.2 仲裁的过程:以两个主设备竞争为例
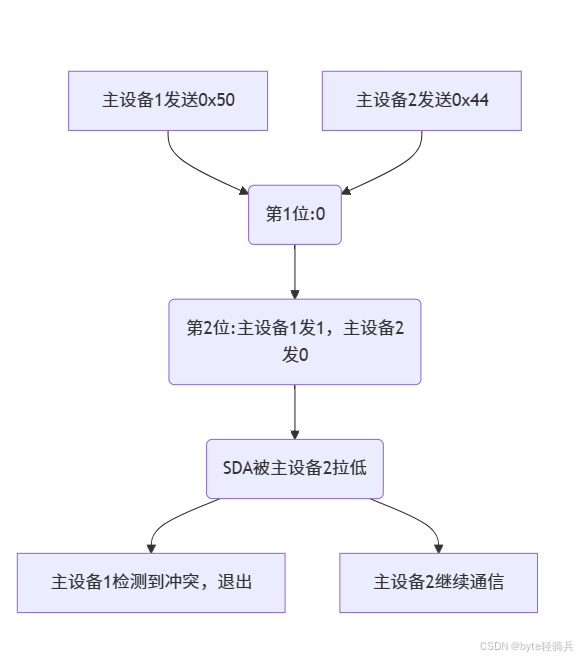
假设主设备 1 和主设备 2 同时发起通信:
步骤详解
1. 同时发送起始位:两者都拉低 SDA(起始位有效);
2. 发送地址字节:主设备 1 发送 “0x50”(地址),主设备 2 发送 “0x44”(地址);
3. 逐位比较:
- 第 1 位:主设备 1 发 “0”,主设备 2 发 “0”→ SDA 低(一致,继续);
- 第 2 位:主设备 1 发 “1”,主设备 2 发 “0”→ SDA 低(主设备 2 的 “0” 拉低总线);
- 主设备 1 发现自己的 “1” 与 SDA 的 “0” 不一致,退出仲裁;
4. 主设备 2 获得总线:继续完成通信。
3.3 仲裁的 3 个关键结论
- 地址决定优先级:地址字节中 “0” 越多的设备,越容易在仲裁中胜出(因为 “0” 会拉低 SDA,让其他发 “1” 的设备检测到冲突);
- 仲裁不影响数据:仲裁过程中,所有已发送的位都是正确的(因为 “线与” 确保了 SDA 的实际电平是所有发送方的 “共同结果”);
- 仲裁是 “无损” 的:仲裁失败的主设备可以随时重新发起通信。
四、I²C 的 “实战避坑”:常见问题与解决方案
理论学得再熟,实际调试时也可能遇到各种 “玄学问题”。以下是 I²C 开发中最常见的 5 类问题,附亲测有效的解决方案。
4.1 问题 1:上拉电阻选多大?
现象:SDA/SCL 的上升沿变缓,导致从机无法正确识别数据(如 ACK 错误)。
原因:上拉电阻的取值直接影响总线的上升时间(tr)。根据 I²C 规范(标准模式),tr 必须≤1000ns(快速模式≤300ns)。电阻太大(如 100kΩ)会导致 tr 过长;电阻太小(如 1kΩ)会导致电流过大(可能烧毁芯片)。
解决方案:
- 标准模式(100kbps):4.7kΩ(3.3V 系统)或 10kΩ(5V 系统);
- 快速模式(400kbps):2.2kΩ(减小上升时间);
- 实测时用示波器测量 SDA 的上升时间,确保满足规范。
4.2 问题 2:总线 “卡住”,无法通信
现象:主设备发送起始位后,SDA 一直被拉低,无法继续传输。
可能原因:
- 从机 “死机”:从机因错误未释放 SDA(如程序跑飞);
- 总线短路:SDA 与 GND 短路(如焊接错误);
- 上拉电阻失效:电阻虚焊或损坏。
解决方案:
- 硬件排查:用万用表测量 SDA 与 GND 的电阻(正常应为上拉电阻值);
- 软件复位:主设备发送 “9 次时钟脉冲”(SCL 高电平,SDA 高电平),强制从机释放总线;
- 从机复位:通过硬件复位引脚(如 RESET)重启从机。
4.3 问题 3:ACK 错误(接收方不回 ACK)
现象:主设备发送地址或数据后,SDA 在 ACK 周期保持高电平。
可能原因:
- 从机地址错误:主设备发送的地址与从机实际地址不匹配;
- 从机忙:从机正在处理其他任务(如 EEPROM 写入未完成);
- 数据错误:从机检测到 CRC 校验失败(部分从机支持)。
解决方案:
- 确认从机地址:用 I²C 扫描工具(如 Arduino 的 Wire 库)查找总线上的设备地址;
- 增加延时:在写操作后增加等待时间(如 EEPROM 需要 5ms 写入时间);
- 检查数据:用示波器抓取 SDA 波形,确认发送的数据是否正确。
4.4 问题 4:高频噪声干扰
现象:通信时好时坏,SDA/SCL 上出现 “毛刺”(高频干扰)。
可能原因:
- 电源纹波:电源模块输出不稳定,导致 SCL/SDA 电平波动;
- 电磁干扰(EMI):附近有电机、开关电源等强干扰源;
- 总线过长:导线电感引起 “振铃”(高频反射)。
解决方案:
- 电源滤波:在电源端并联 100nF 去耦电容(靠近芯片);
- 总线滤波:在 SDA/SCL 上并联 10pF~100pF 电容(滤除高频噪声);
- 屏蔽布线:使用双绞线或屏蔽线(减少 EMI);
- 降低速率:将快速模式(400kbps)改为标准模式(100kbps),提高抗干扰能力。
4.5 问题 5:多主仲裁失败
现象:两个主设备同时通信时,总线数据混乱。
可能原因:
- 仲裁逻辑错误:主设备未正确检测 SDA 的实际电平;
- 地址优先级设计不合理:高优先级设备地址中 “0” 太少;
- 软件时序错误:主设备在仲裁期间提前释放总线。
解决方案:
- 软件实现仲裁:主设备在发送每一位后,读取 SDA 的实际电平,与自己发送的位比较;
- 合理分配地址:高优先级设备(如主控 MCU)使用低地址(“0” 多的地址);
- 增加总线空闲时间:主设备在发送起始位前,检测总线是否空闲(SCL 和 SDA 均为高电平)。
五、I²C vs 其他协议:为什么选它?
为了更好理解 I²C 的适用场景,我们对比了嵌入式领域最常用的 3 大串行协议:
| 特性 | I²C | SPI | UART |
|---|---|---|---|
| 线数 | 2(SCL+SDA) | 4(SCK+MOSI+MISO+CS) | 2(TX+RX) |
| 拓扑结构 | 多主多从(地址区分) | 单主多从(CS 片选) | 点对点 |
| 传输速率 | 标准 100kbps,快速 400kbps | 最高数 10Mbps(全双工) | 最高约 1Mbps(半双工) |
| 优势 | 引脚少、支持多设备 | 速度快、全双工 | 简单、跨平台兼容 |
| 劣势 | 速率较低、抗干扰一般 | 线数多、需片选信号 | 无应答机制、易丢数据 |
I²C 的典型场景:
- 传感器(温湿度、加速度、气压);
- 存储芯片(EEPROM、FRAM);
- 显示模块(OLED、LCD);
- 低速率、多设备的嵌入式系统(如智能家居、可穿戴设备)。
六、总结
从 1982 年飞利浦工程师发明 I²C 至今,40 多年过去了,它依然是嵌入式领域的 “顶流协议”。这背后的原因,是它用极简的硬件设计(两根线)实现了复杂的功能(多主通信、设备寻址、错误校验)。
当然,I²C 也有局限(如速率不如 SPI,抗干扰能力一般),但在 “小而美” 的场景里,它依然是首选。下次调试 I²C 设备时,记得:
- 用示波器看时序,比看代码更直观;
- 上拉电阻不是 “随便选”,而是 “必须算”;
- 仲裁机制不是 “玄学”,而是 “线与” 的必然结果。
最后送你一句话:I²C 的魅力,在于它用最基础的硬件(两根线),编织出了最精密的数据网络 —— 这或许就是 “大道至简” 的最好诠释。