深度学习-卷积神经网络CNN-膨胀卷积、可分离卷积(空间可分离、深度可分离)、分组卷积
目录
卷积
1. 膨胀卷积
2. 可分离卷积
2.1 空间可分离卷积
2.2 深度可分离卷积
3. 分组卷积
卷积
1. 膨胀卷积
膨胀卷积也被称为空洞卷积或扩张卷积,是一种通过卷积核的元素之间插入“空洞”来扩展感受野的卷积操作。
膨胀卷积用膨胀率L表示u哦啊扩大内核的范围,即在内核元素间插入L-1个空格个,默认L=1时,内核元素间没有插入空格,即标准卷积
L=2时:
感受野(Receptive Field):
-
感受野是输出特征图上某个点对应输入图像的区域大小。
-
膨胀卷积通过增大膨胀率 L,可以显著扩大感受野,而无需增加卷积核尺寸或步长。
-
标准卷积(L=1, K=3)的感受野为 3×3。
-
膨胀卷积(L=2, K=3)的感受野为 5×5(相当于 7×7 的覆盖范围,但只有 9 个参数)。
import torch
import torch.nn as nn
def test01():conv = nn.Conv2d(in_channels=3,out_channels=128,kernel_size=3,stride=1,dilation=2,padding=1,bias=True)out = conv(torch.randn(1,3,224,224))print(out.shape)
if __name__ == '__main__':test01()2. 可分离卷积
可分离卷积是一种将常规卷积操作进行拆分,以减少计算量和参数量的卷积方式,主要有空间可分离卷积和深度可分离卷积两种类型。
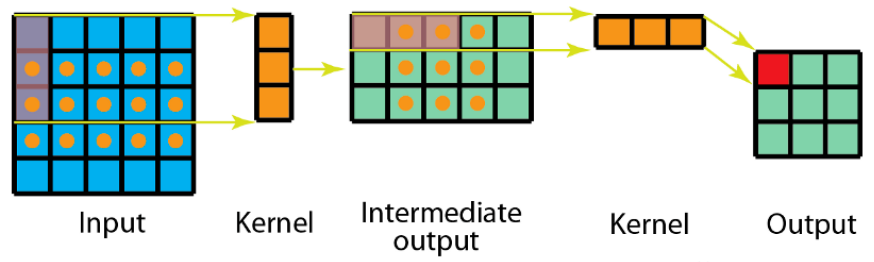
2.1 空间可分离卷积
概念
空间可分离卷积是一种将传统二维卷积分解为两个一维卷积的操作。通过分别对图像的行和列进行卷积,减少计算量和参数量。
原理
-
标准卷积:直接使用
的二维卷积核。
-
空间可分离卷积:
-
先对图像的每一行进行
的一维卷积(水平方向)。
-
再对结果的每一列进行
的一维卷积(垂直方向)。
-
-
在数学中我们可以将矩阵分解:
-
计算量对比:
-
标准卷积:
-
空间可分离卷积:
。
-
比例:当 k > 2 时,空间可分离卷积的计算量显著降低。
-
-
优点:
-
显著减少计算量
-
适用于特定可分解的卷积核(如 Sobel 核)。
-
-
缺点:
-
仅适用于可分解的卷积核,通用性差。
-
可能丢失图像的空间相关性。
-
实现
import torch
import torch.nn as nn
def test02():inpupt_map = torch.randn(1, 1, 7, 7)conv1 = nn.Conv2d(in_channels=1,out_channels=1,kernel_size=(3,1),stride=1,)conv2 = nn.Conv2d(in_channels=1,out_channels=1,kernel_size=(1,3),stride=1,)out = conv1(inpupt_map)out = conv2(out)print(out.shape)
if __name__ == '__main__':test02()2.2 深度可分离卷积
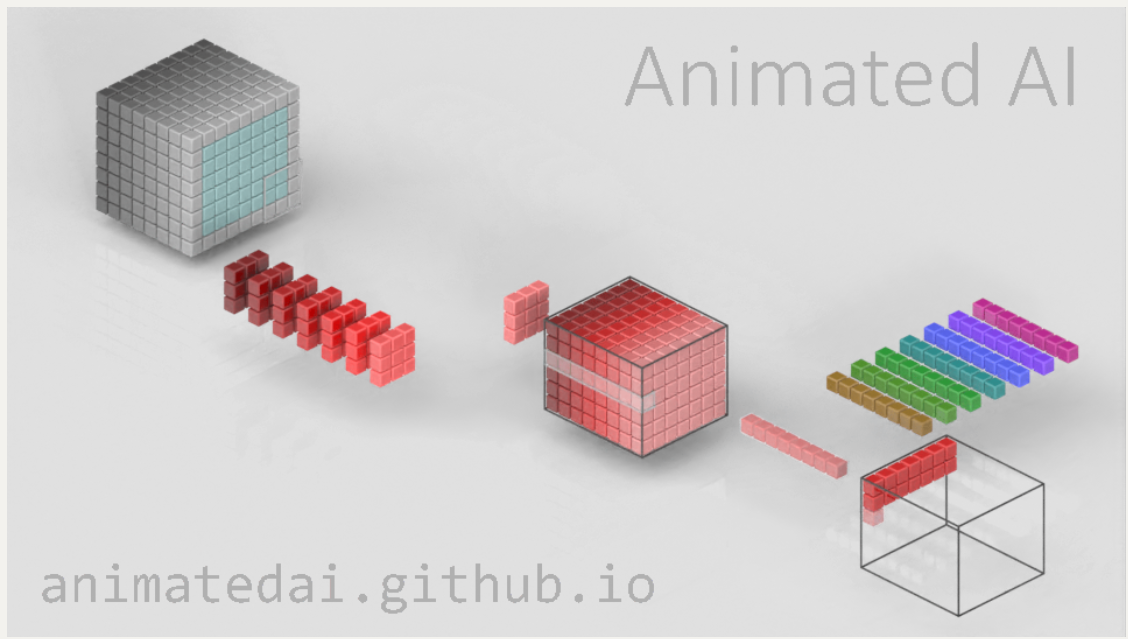
深度可分离卷积是一种高效的卷积操作,通过将标准卷积分解为两个独立步骤,在保持特征提取能力的同时大幅减少计算量和参数量
深度可分离卷积将标准卷积分解为两个步骤:
-
深度卷积(Depthwise Convolution):对每个输入通道独立进行卷积。
-
逐点卷积(Pointwise Convolution):使用
卷积核融合通道信息。
-
原理
-
深度卷积:
-
输入通道
,输出通道
-
每个通道使用独立的卷积核。
-
-
逐点卷积:
-
使用
通道。
-
-
计算量对比:
-
标准卷积:
-
深度可分离卷积:
-
比例:计算量约为标准卷积的
。
-
图1:输入图的每一个通道,我们都使用了对应的卷积核进行卷积。 通道数量 = 卷积核个数,每个卷积核只有一个通道
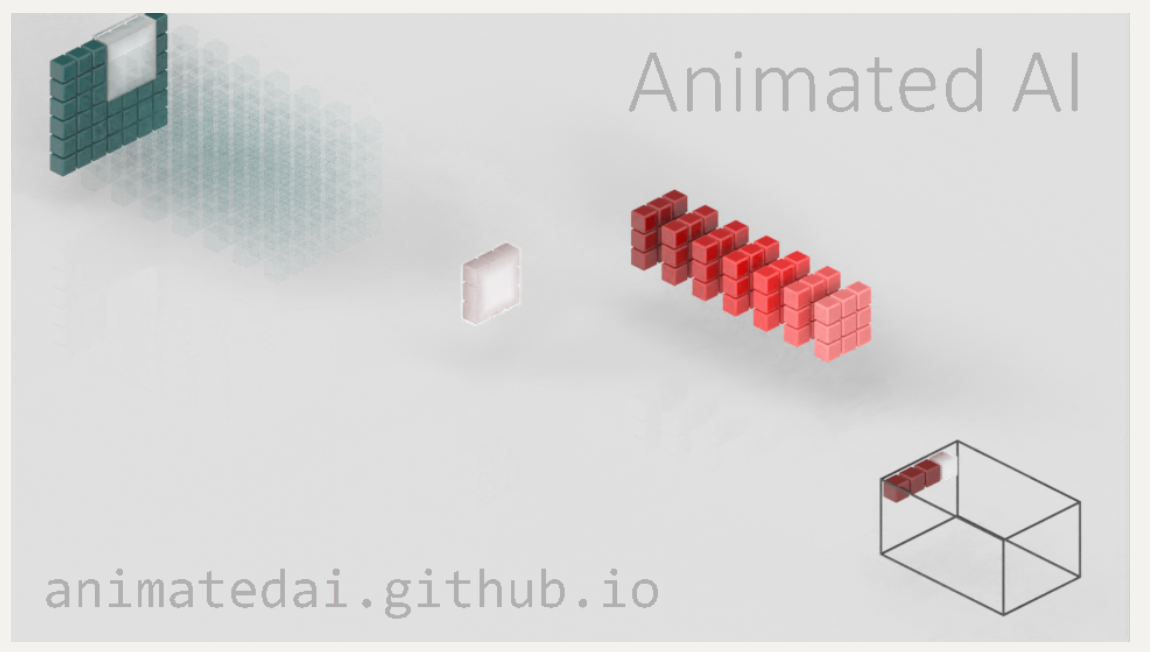
图2:完成卷积后,对输出内容进行1x1的卷积
import torch
import torch.nn as nn
def test02():input_map = torch.randn(1, 8, 7, 7)# 8*1*3*3conv1 = nn.Conv2d(in_channels=8,out_channels=8,kernel_size=3,stride=1,groups=8)# 8*8*1*1con2 = nn.Conv2d(in_channels=8,out_channels=8,kernel_size=1,stride=1,)out = conv1(input_map)out = con2(out)print(out.shape)
if __name__ == '__main__':test02()
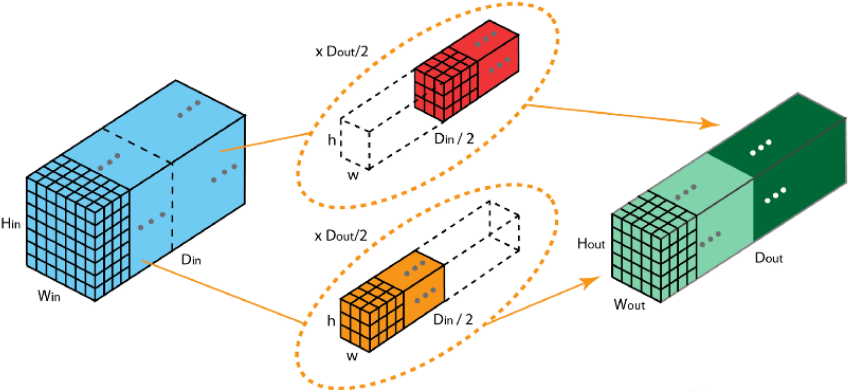
3. 分组卷积
概念分组卷积通过将输入通道分成多个组,每组独立进行卷积操作,最后合并结果。常见于 ResNext、SqueezeNet 等模型。
原理
-
分组策略:
-
输入通道
-
为每个组分配独立的卷积核(每组卷积核仅处理对应组的输入通道)
-
每组卷积运算独立进行,最后将各组输出拼接得到最终结果
-
-
参数量对比:
-
标准卷积:
。
-
分组卷积:
。
-
-
计算量对比:
-
标准卷积:
。
-
分组卷积:
。
-
实现
import torch
import torch.nn as nn
def test01():input_map = torch.randn(1, 128,14,14)# 64*16*3*3conv = nn.Conv2d(in_channels=128,out_channels=64,kernel_size=3,stride=1,groups=8)out = conv(input_map)print(out.shape)for name,param in conv.named_parameters():print(name,param.shape)
if __name__ == '__main__':test01()特点
-
优点:
-
计算量和参数量减少 G 倍。
-
适合并行计算(GPU/TPU 多核架构)。
-
提升模型多样性(如 ResNext 中通过增加组数增强性能)。
-
-
缺点:
-
分组后可能限制通道间的信息交互。
-
需要合理设计组数 G(过大导致性能下降)。
-