Nature Machine Intelligence 北京通研院朱松纯团队开发视触觉传感仿人灵巧手,实现类人自适应抓取
开发能够适应现实世界动态环境的机械手一直是机器人学和机器智能领域的一个基本挑战。尽管在复制人手运动学和控制算法方面取得了显著进步,但机器人系统在动态环境中仍然难以与人类的能力相匹配,这主要是由于触觉反馈不足。
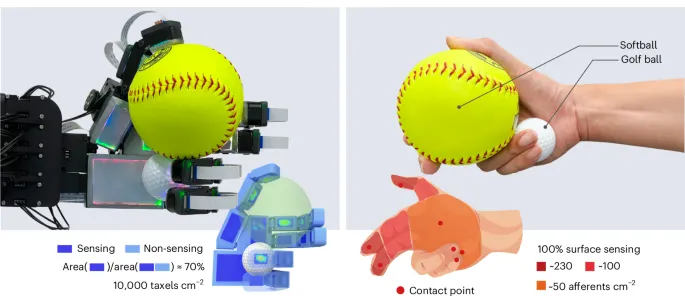
北京通研院朱松纯教授团队推出了 F-TAC Hand,这是一款仿生手,在其 70% 的表面积上具有高分辨率触觉感应(0.1 毫米空间分辨率)。通过优化的手部设计克服了集成高分辨率触觉传感器的传统挑战,同时保持了整个运动范围。这只手由生成算法提供支持,该算法合成了类似人类的手部配置,在动态的现实条件下展示了强大的抓取能力。对 600 次真实物理试验的广泛评估表明,这种触觉体现系统在复杂的作任务中明显优于非触觉知情的替代方案。这些结果为丰富的触觉体现在开发高级机器人智能中的关键作用提供了实证证据,为物理传感能力与智能行为之间的关系提供了有希望的前景。目前相关成果发表在Nature Machine Intelligence期刊。
https://www.nature.com/articles/s42256-025-01053-3#data-availability
技术路线
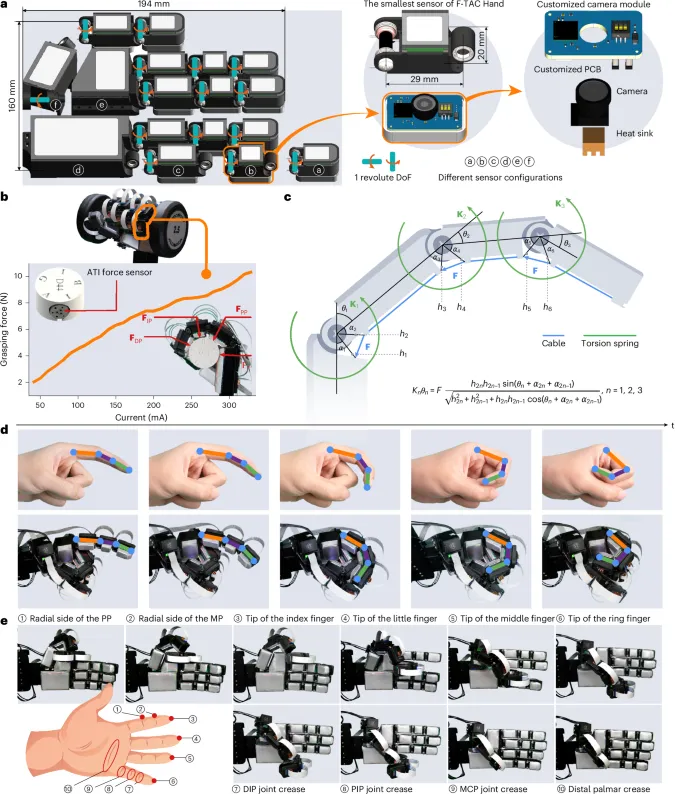
硬件设计:F-TAC Hand 通过将 17 个基于视觉的触觉传感器有效集成在 6 种优化配置中,实现了高分辨率触觉覆盖。每个传感器都包括一个简化的摄像头模块,可在狭窄空间内高效采集触觉数据。
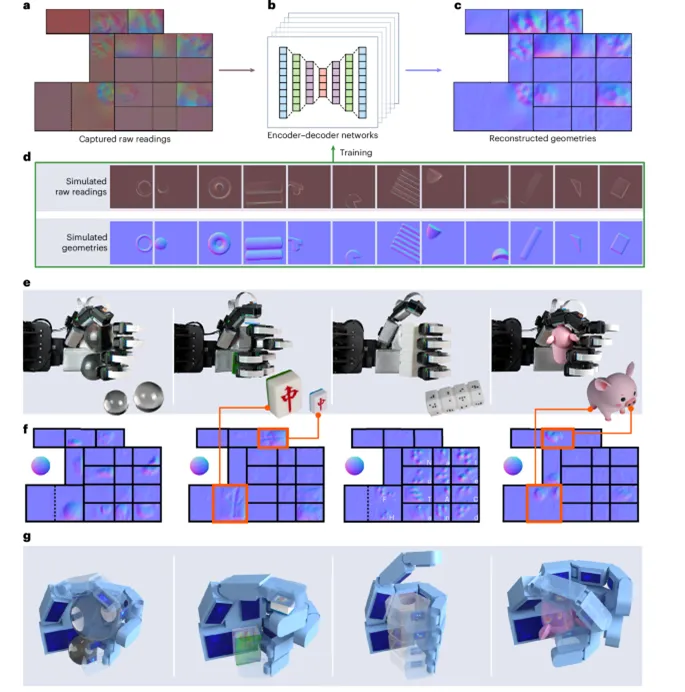
触觉传感:触觉传感系统利用光度立体原理,通过编码器-解码器神经网络和泊松求解器重建接触面几何形状,实现高保真表面几何图形的重建。
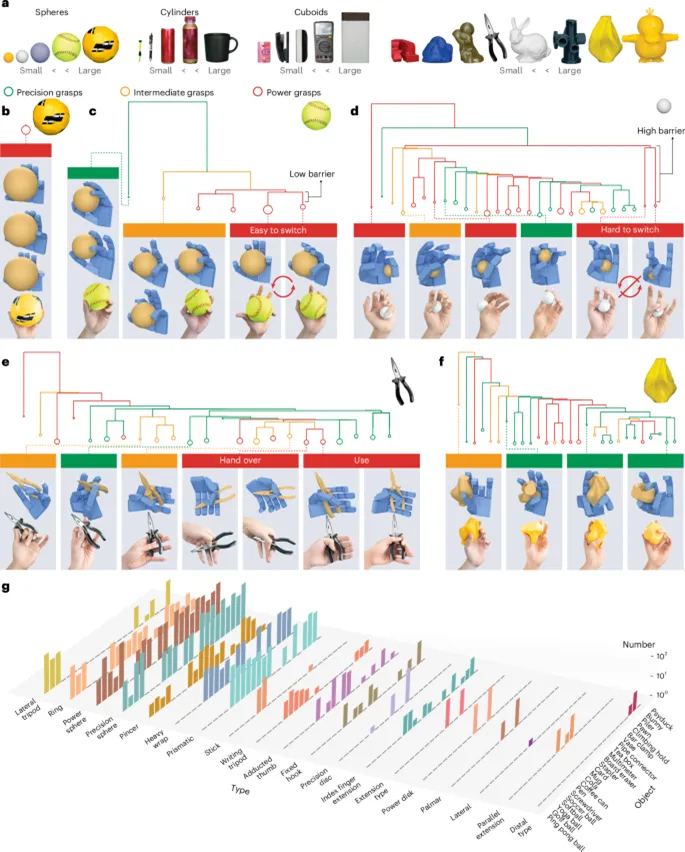
抓取生成:开发了一种生成算法,将刚性对象的机器人抓取生成建模为来自以对象几何条件的 Gibbs 分布中的采样手部姿势。通过改进的 Metropolis 调整的 Langevin 算法,从随机初始化中采样 grasps 并应用改进的 Metropolis 调整的 Langevin 算法来减少能量并逃避局部最小值,收敛到低能量、高质量的 grasps。
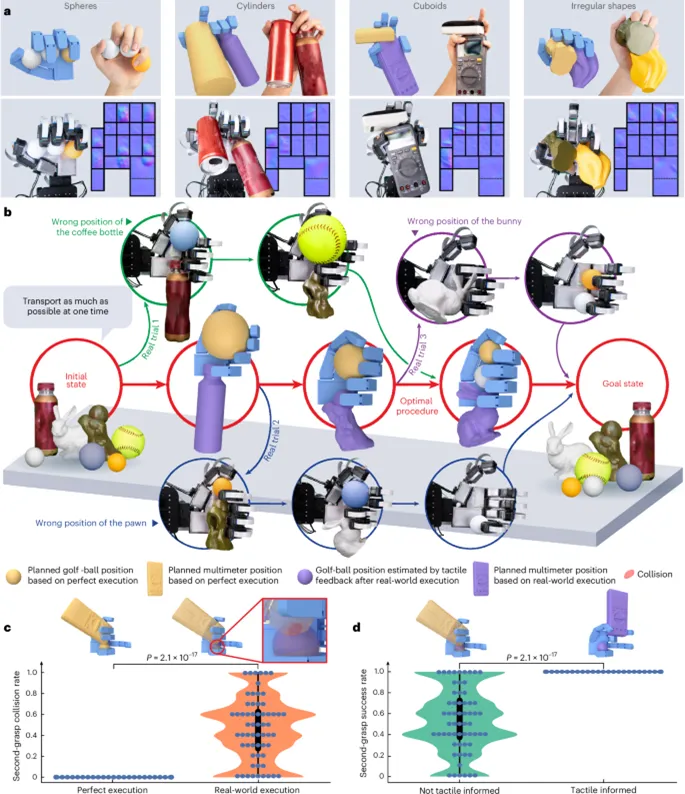
适应性行为:F-TAC Hand 通过闭环触觉知情控制,可处理高维接触数据,以实现精确、自适应的操作。通过精确的接触点识别和动态策略调整,F-TAC Hand 能够在多对象抓取任务中实现高效的运输和避免碰撞。
实验结果
对 600 次真实世界试验的广泛评估表明,与非触觉替代方案相比,F-TAC Hand 的性能显著提高(P < 0.0001),尤其是在涉及真实执行噪声和动态对象交互的场景中。
创新总结
高分辨率触觉覆盖:F-TAC Hand 实现了前所未有的仿生保真度,通过密集的触觉阵列和强大的运动能力的结合,提高了机器人操作能力和我们对人类手部灵巧性的理解。
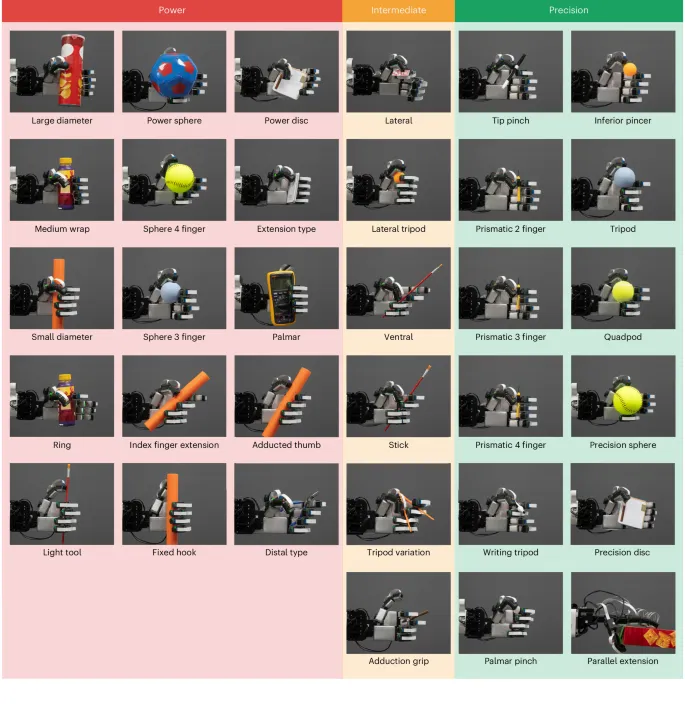
多样化抓取策略:F-TAC Hand 能够生成多样化的、类似人类的手型,为 F-TAC Hand 提供了最优和近乎最优的控制策略,在实际操作场景中增强敏捷性和适应性。
适应性行为:F-TAC Hand 通过闭环触觉知情控制,可处理高维接触数据,以实现精确、自适应的操作。通过精确的接触点识别和动态策略调整,F-TAC Hand 能够在多对象抓取任务中实现高效的运输和避免碰撞。
F-TAC Hand 代表了机器人感觉-运动整合方面的重大进步,实现了全面的触觉传感与类似人类的灵巧性的前所未有的整合。这项研究为丰富的触觉反馈在智能行为中的关键作用提供了具体证据,为开发超越纯计算方法的具身 AI 系统提出了有希望的方向。