论文略读: CITYANCHOR: CITY-SCALE 3D VISUAL GROUNDING WITH MULTI-MODALITY LLMS
ICLR 2025 6668
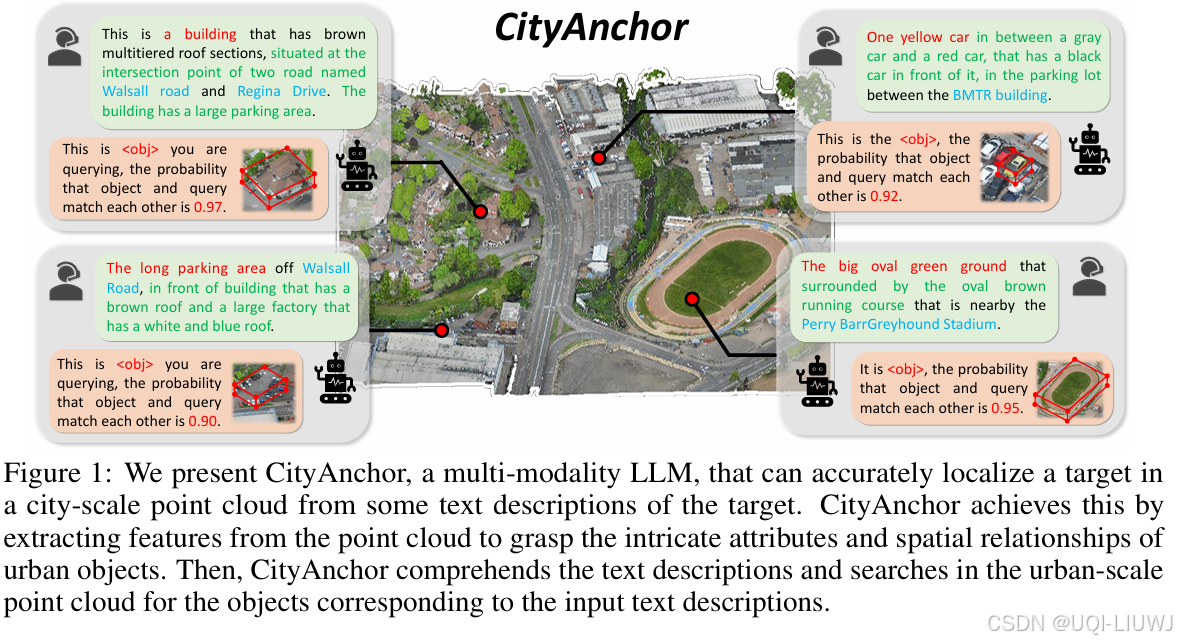
本文提出了一种名为 CityAnchor 的三维视觉指定位方法,用于在城市级点云(city-scale point cloud)中定位城市物体。近年来多视图重建技术的发展使得构建大规模城市点云成为可能,但如何在如此大尺度的点云中进行视觉指定位仍是一个开放问题。
现有的 3D 视觉指定位系统主要集中于图像或小尺度点云中的目标定位,这种方法在精度和效率上都难以扩展至城市级点云的应用场景。
为解决这一挑战,本文提出了一种多模态大语言模型(LLM)驱动的两阶段方法,包括:
-
粗定位阶段(Coarse Localization):根据文本描述,在点云投影后的二维地图上定位可能的区域;
-
细粒度匹配阶段(Fine-Grained Matching):在这些候选区域中进一步精确匹配出与文本描述最相符的目标对象。
我们在 CityRefer 数据集以及我们新构建并标注的合成数据集上进行了实验,结果表明,CityAnchor 能够在城市级三维点云中实现准确的 3D 视觉指定位,验证了方法的有效性与可扩展性。