开疆智能ModbusTCP转Devicenet网关连接ABB机器人配置案例
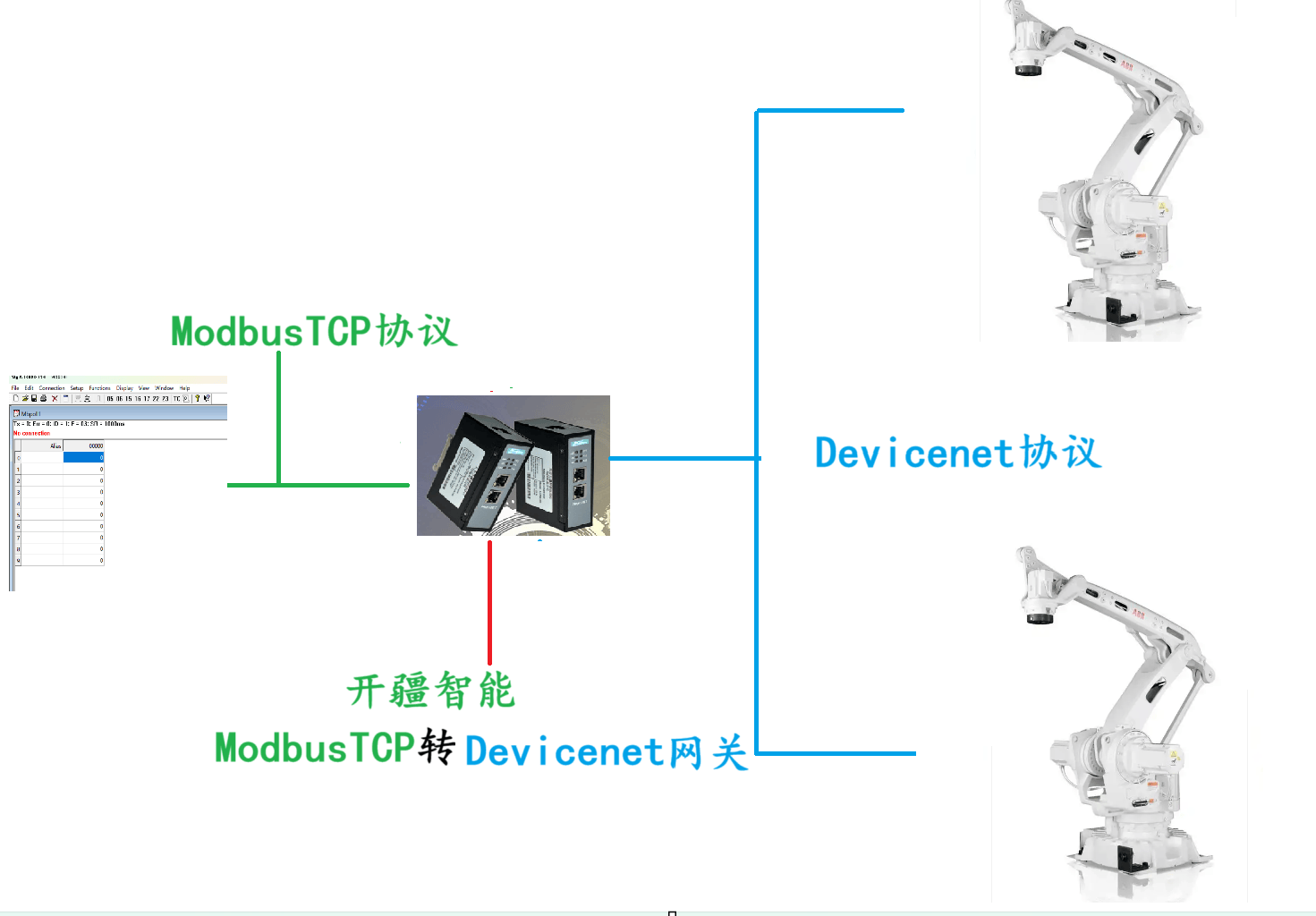
本案例是模拟ModbusTCP主站软件通过开疆智能ModbusTCP转Devicenet网关连接ABB机器人的配置案例,具体过程如下。
配置过程
ABB机器人IO板配置
1、简介
(ABB老版本IO板通讯配置为UNIT,新版本IO板通讯配置为DeviceNet device,此日记以新版本DeviceNet device进行学习)
709-1 DeviceNet Master/Slave ABB官方数据手册:
709-1 DeviceNet Master/Slave的使用需要有硬件DSQC1095 DeviceNet板。
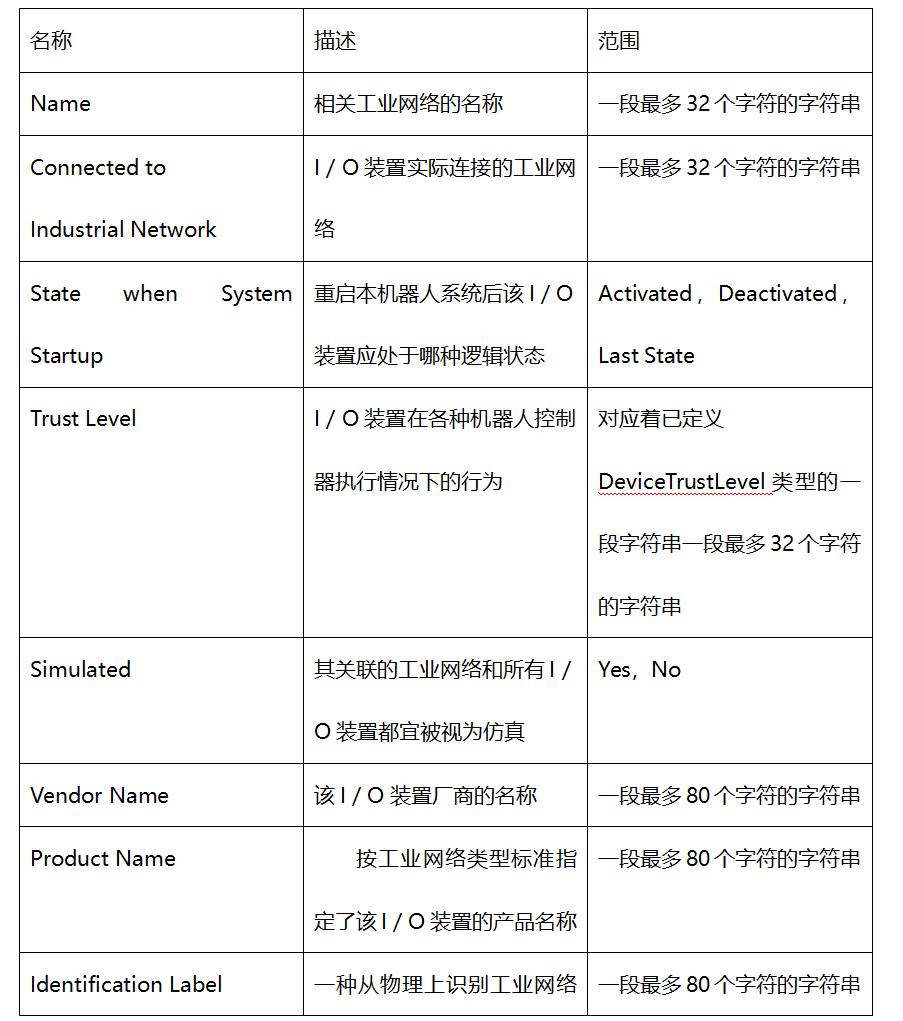
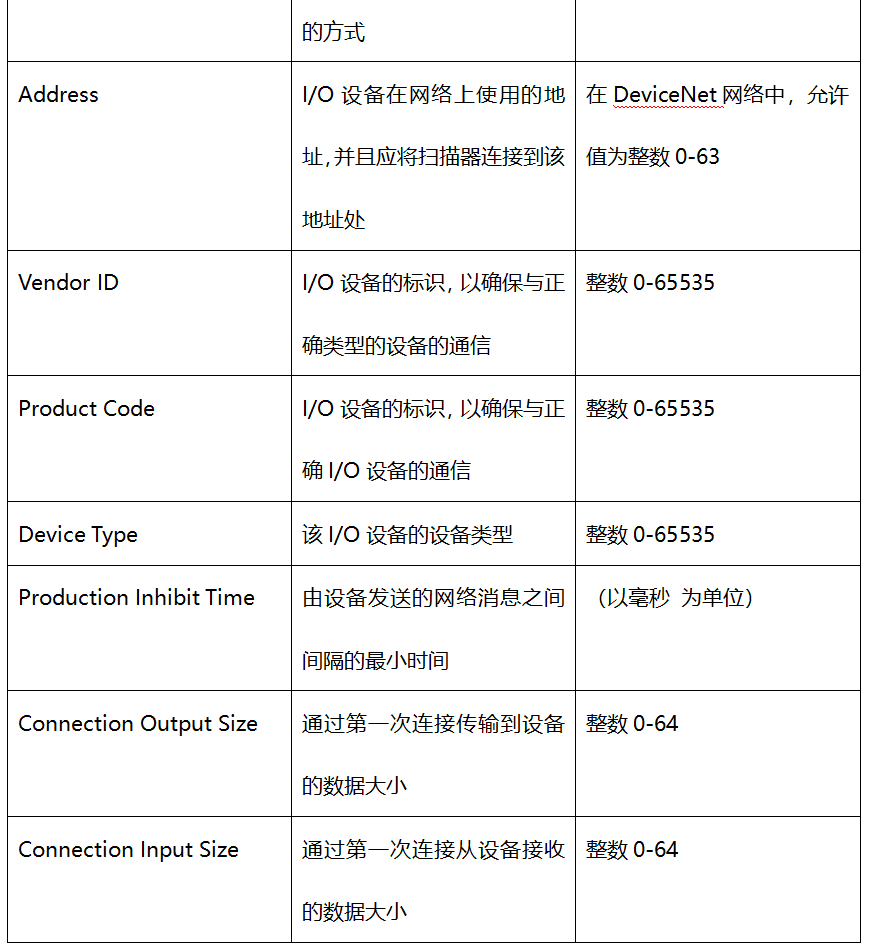
2、DeviceNet Device参数表
3、配置方法
在Robot Studio 6.08创建好工程并导入机器人模型与添加控制器后,点击控制器选项卡打开配置下拉菜单,选择I/O System。在I/O System列表中找到DeviceNet device选项,右键新建。在弹出的对话框选择对应的I/O模版,这边以DSQC 652(16个字量输入和16个字量输出)为例。
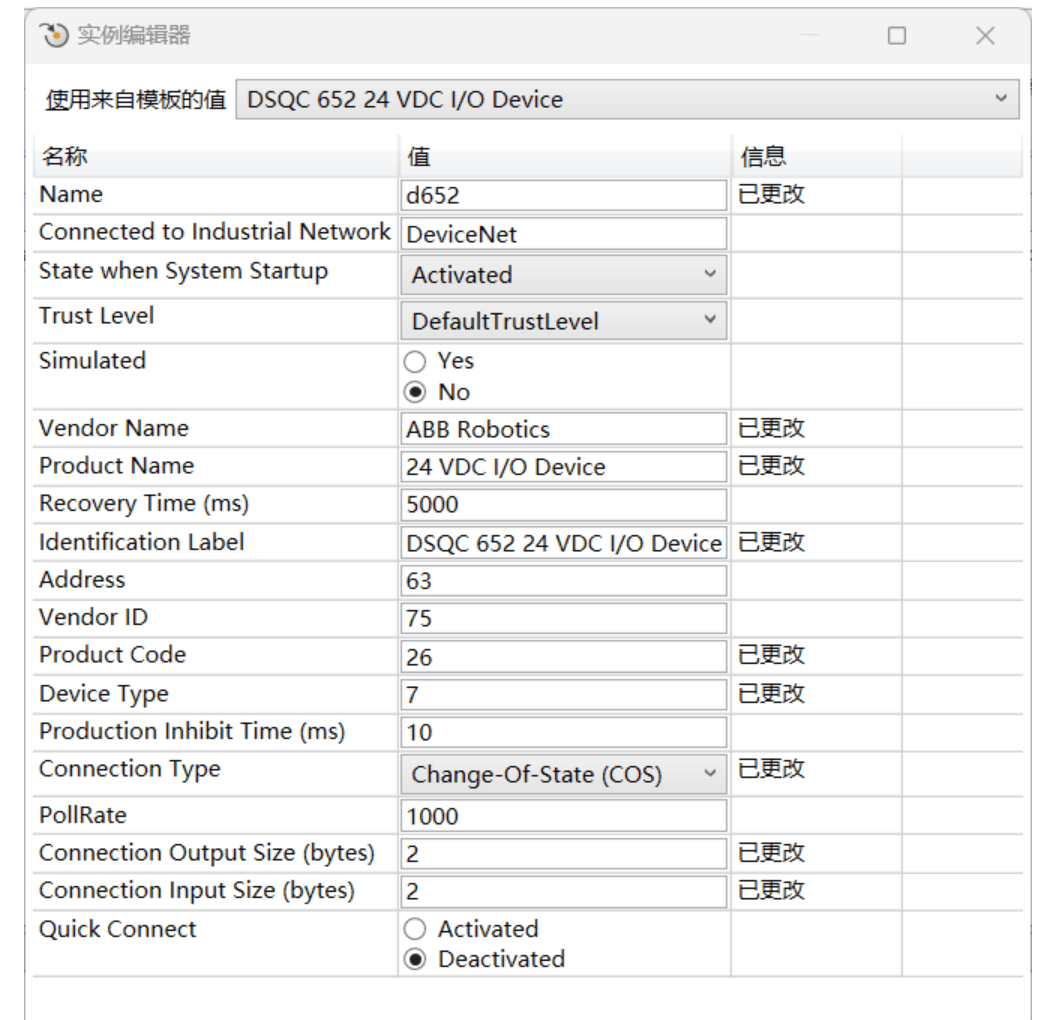
在配置列表中,用户需修改Name和Address,地址需要根据实际硬件修改。点击确认I/O板就配置完毕。
ModbusTCP转Devicenet网关配置
将网关的DeviceNet接口与ABB机器人的DeviceNet端口连接。
将网关的Modbus TCP接口通过以太网连接到控制系统网络。
确保电源和信号线连接正确,避免松动或接触不良14。
(2)网关参数配置
DeviceNet侧配置:
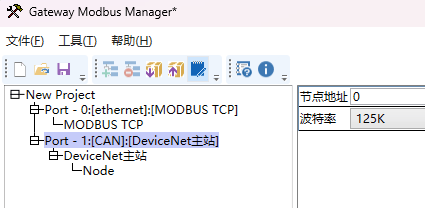
设置网关的DeviceNet站地址,确保与机器人配置一致。
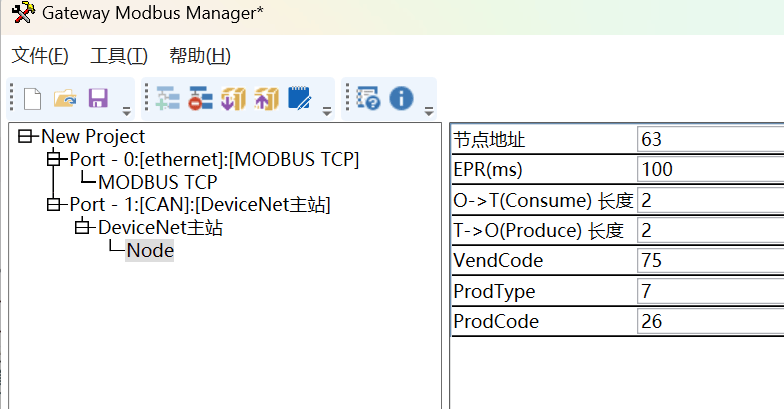
配置DeviceNet的波特率(125K、250K、500K),与机器人匹配。
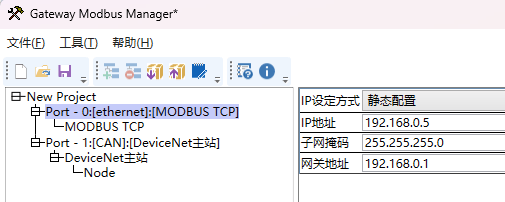
Modbus TCP侧配置:
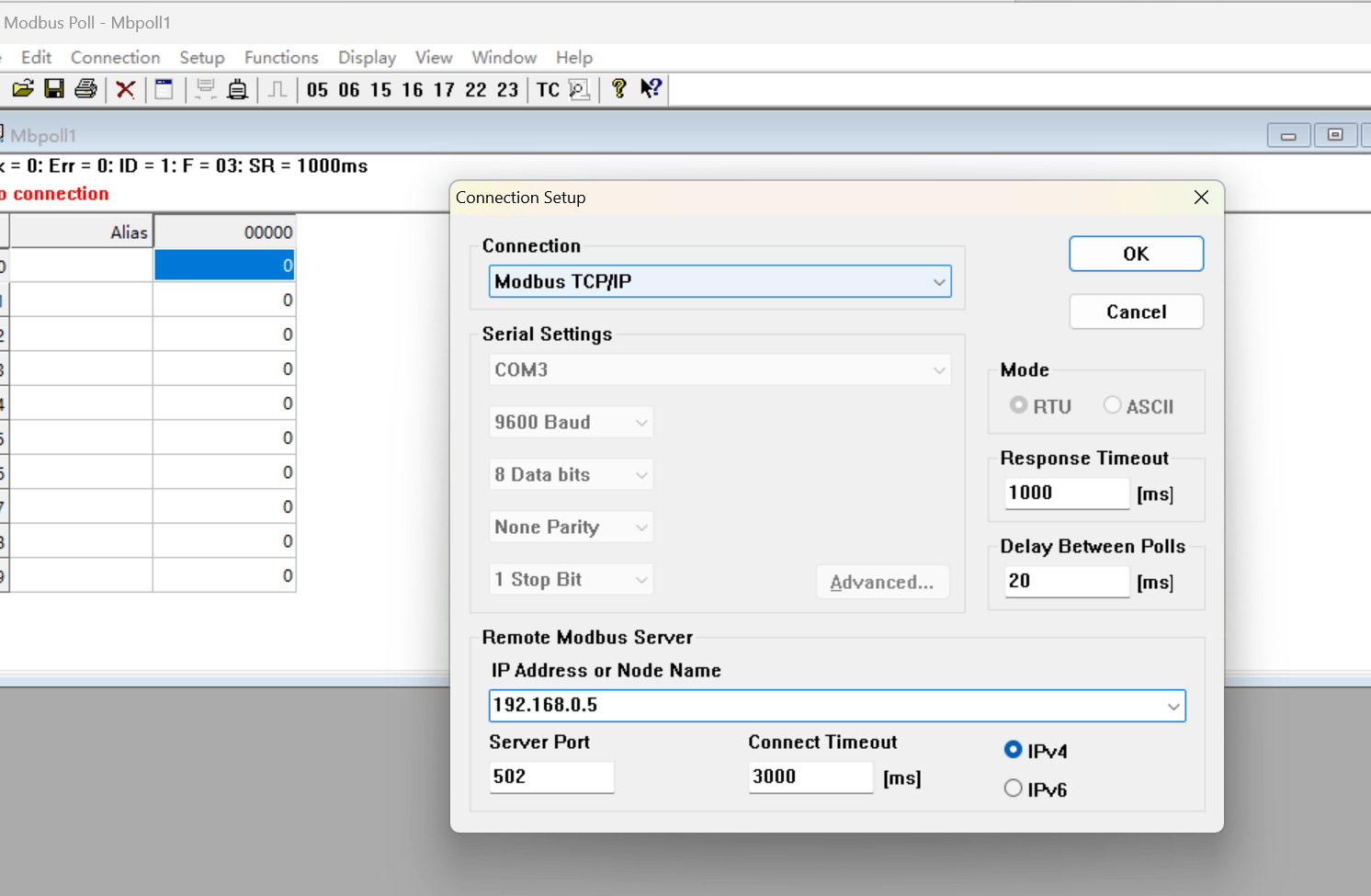
设置网关的IP地址、子网掩码、网关地址,确保与控制系统网络兼容。
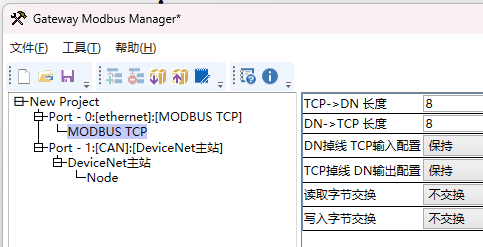
配置Modbus TCP一侧的数据交换长度,字节顺序以及掉线后数据处理方式。
(3)数据映射配置
使用网关配置软件,将ABB机器人的DeviceNet数据地址映射到Modbus
设置完成后,将配置下载进网关即可。
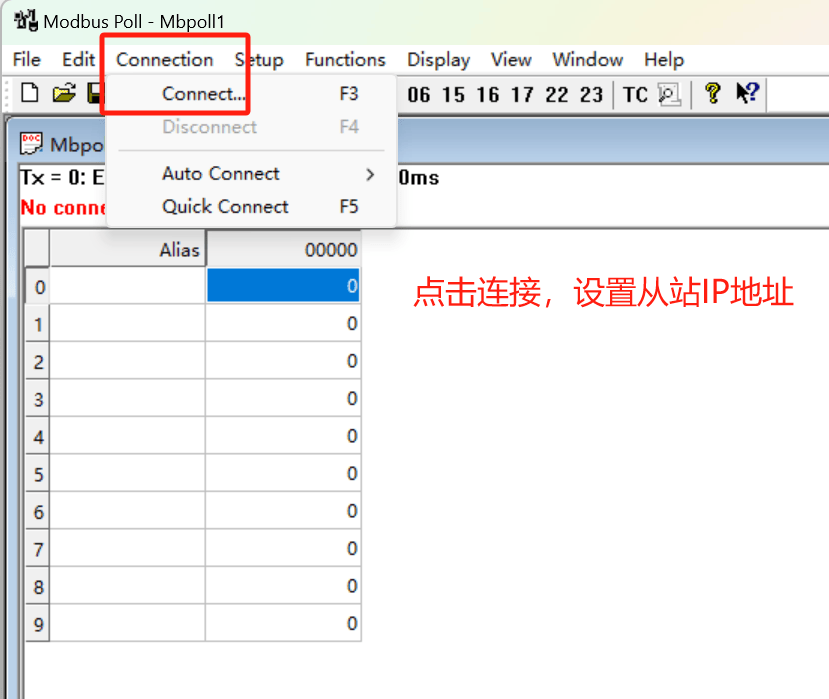
打开Modbus主站软件“Modbus Poll”
设置完成后,即可通过Modbus主站软件控制ABB机器人。