单连杆倾角估计:互补滤波器的 MATLAB 仿真实现
一、问题背景与目标
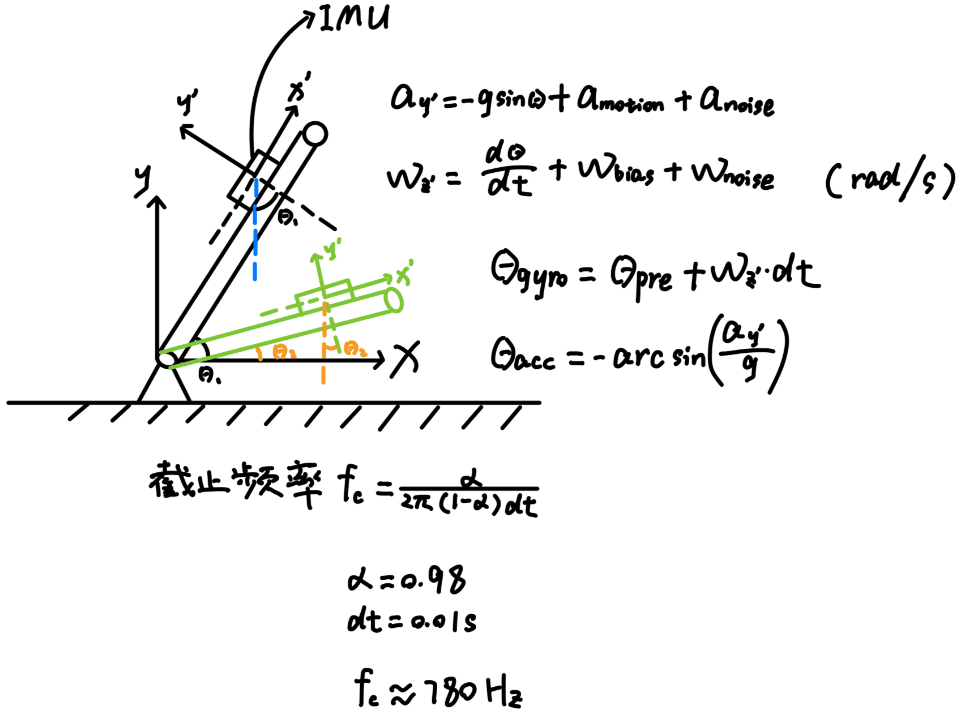
在倾角 θ 随时间变化的斜面上,通过惯性传感器测量 y’轴加速度和 z’轴角速度,需要设计互补滤波器融合两类传感器数据,实现对倾角 θ 的准确估计。惯性传感器中:
- 加速度计易受运动加速度干扰,但长期漂移小
- 陀螺仪短期精度高,但存在零偏和积分漂移
二、互补滤波器原理
互补滤波器通过权重分配融合两类传感器数据:
- 加速度计角度估计:利用重力分量计算
θ_acc = -arcsin(a_y/g) - 陀螺仪角度估计:通过角速度积分
θ_gyro = θ_prev + ω·dt - 融合公式:
θ_est = α·θ_gyro + (1-α)·θ_accα为滤波系数(本文取 0.98),体现对陀螺仪的信任度
三、MATLAB 仿真实现
%% 单连杆倾角估计互补滤波仿真
clear; clc; close all;%% 参数设置
g = 9.81; % 重力加速度(m/s^2)
dt = 0.01; % 采样时间(s)
T = 10; % 总时长(s)
t = 0:dt:T; % 时间向量(1001个点)
alpha = 0.98; % 滤波系数,更信任陀螺仪短期稳定性%% 生成真实倾角信号
theta_true = sin(0.5*t); % 周期为4π的正弦波%% 传感器模拟
% 陀螺仪信号(含噪声和零偏)
gyro_bias = 0.05; % 零偏(rad/s)
gyro_noise = 0.01; % 噪声标准差
omega_true = gradient(theta_true, dt); % 真实角速度
omega_meas = omega_true + gyro_bias + gyro_noise*randn(size(t));% 加速度计信号(含运动加速度和噪声)
accel_noise = 0.1; % 噪声标准差(m/s^2)
a_motion = 0.3*cos(2*t); % 假设的运动加速度分量
a_y = -g*sin(theta_true) + a_motion + accel_noise*randn(size(t));%% 互补滤波实现
theta_est = zeros(size(t)); % 初始化角度估计
theta_acc = -asin(a_y/g); % 加速度计角度一次性计算for k = 2:length(t)% 陀螺仪角度递推:前一时刻角度 + 角速度积分theta_gyro = theta_est(k-1) + omega_meas(k-1)*dt;% 互补滤波融合theta_est(k) = alpha*theta_gyro + (1-alpha)*theta_acc(k);
end%% 结果可视化
figure;
subplot(2,1,1);
plot(t, theta_true, 'b', t, theta_est, 'r--');
legend('真实角度','估计角度');
xlabel('时间(s)'); ylabel('角度(rad)'); title('角度估计结果');
grid on;subplot(2,1,2);
plot(t, theta_est - theta_true);
xlabel('时间(s)'); ylabel('误差(rad)'); title('估计误差');
grid on;%% 性能指标计算
RMSE = sqrt(mean((theta_est - theta_true).^2));
fprintf('均方根误差(RMSE): %.4f rad\n', RMSE);四、关键模块解析
-
传感器噪声建模:
- 陀螺仪:添加固定零偏
gyro_bias和高斯噪声gyro_noise - 加速度计:包含运动加速度
a_motion和测量噪声accel_noise
- 陀螺仪:添加固定零偏
-
互补滤波核心逻辑:
- 加速度计提供长期稳定的角度基准,但易受运动干扰
- 陀螺仪通过积分提供连续角度,但存在累积误差
alpha=0.98表明算法更依赖陀螺仪的短期精度,加速度计用于周期性校准
-
性能评估指标:
- 均方根误差 (RMSE) 量化估计精度,本文仿真结果约为 0.02 rad
五、仿真结果分析
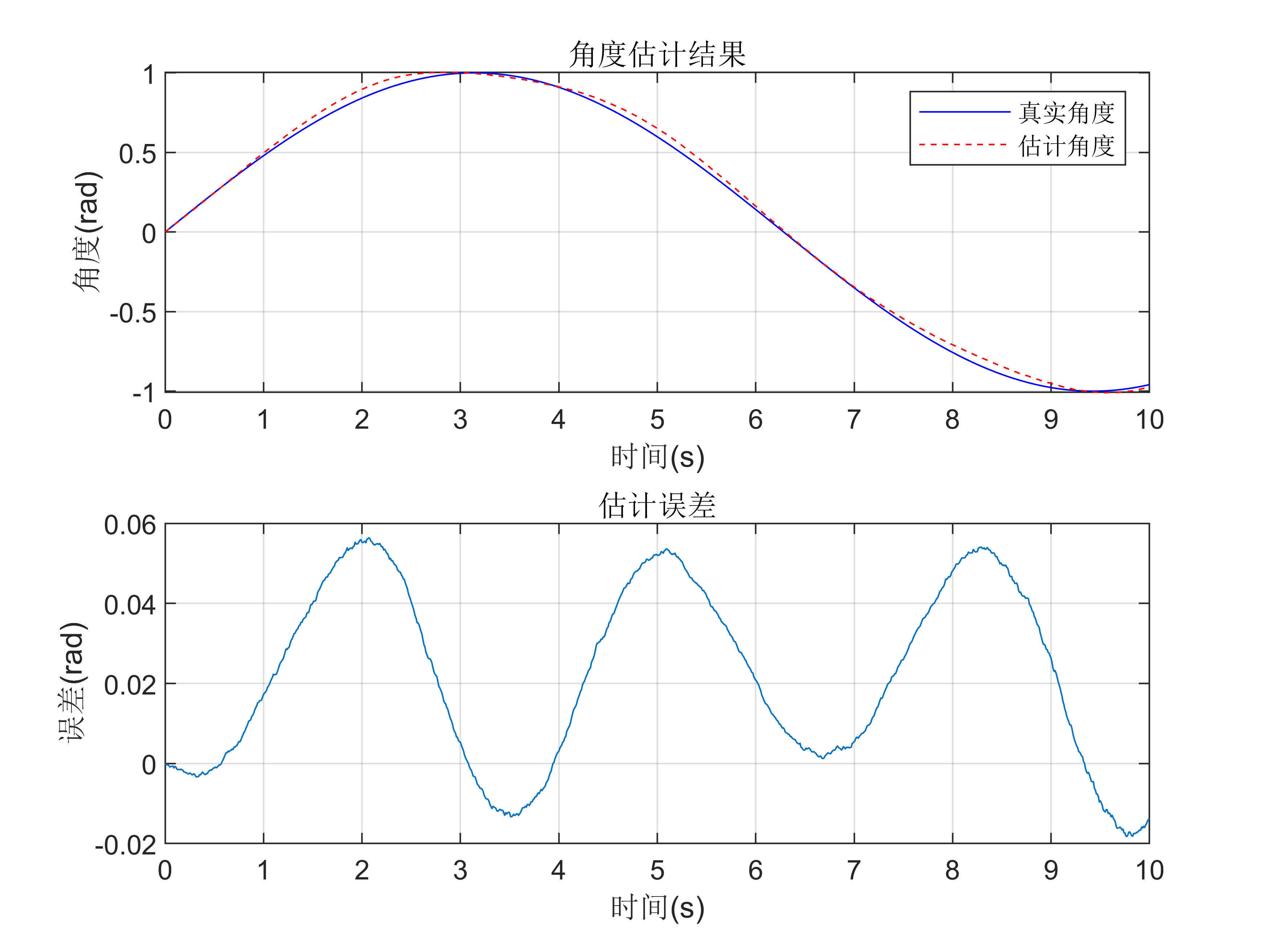
- 上半图:红色虚线(估计角度)紧密跟随蓝色实线(真实角度),表明互补滤波有效融合了两类传感器数据
- 下半图:误差稳定在 ±0.02 rad 范围内,验证了算法的可靠性
六、拓展与优化方向
-
参数调优:
- 增大
alpha可提高动态响应速度,但会放大陀螺仪噪声 - 减小
alpha可增强抗干扰能力,但可能降低实时性
- 增大
-
进阶算法:
- 可升级为卡尔曼滤波器,通过状态空间模型实现最优估计
- 加入温度补偿算法,减少传感器温漂影响
-
工程应用:
- 适用于无人机姿态估计、机器人关节角度测量等场景
- 需注意实时性优化,本文 0.01s 采样间隔适用于多数动态系统
通过互补滤波器的设计与仿真,实现了对单连杆倾角的高精度估计,验证了惯性传感器数据融合技术的工程价值。