nnUNet V2修改网络——加入GAB模块
更换前,要用nnUNet V2跑通所用数据集,证明nnUNet V2、数据集、运行环境等没有问题
阅读nnU-Net V2 的 U-Net结构,初步了解要修改的网络,知己知彼,修改起来才能游刃有余。
EGE-UNet 是 UNet 的一个变体,专为皮肤病变分割而设计。它在 UNet 的基础上引入了 GHPA 模块和 GAB 模块,分别用于多维度特征提取和多尺度信息融合。GHPA 运用多轴分组和 Hadamard 乘积机制,能从不同视角提取病理信息,而 GAB 则通过分组聚合和卷积操作,有效整合不同层次和尺度的特征。这种创新设计使得 EGE-UNet 不仅在 ISIC2017 和 ISIC2018 数据集上取得卓越的分割效果,还大幅降低了参数和计算成本,成为低资源环境下理想的分割模型。
EGE-UNet官方代码仓库: https://github.com/JCruan519/EGE-UNet
GAB模块巧妙地整合了来自不同深度的高低层特征。它先对特征图进行通道分组,将低层特征的细节与高层特征的语义信息通过组内融合结合,使特征在不同尺度上实现有效互补。同时,GAB还引入了深度监督生成的辅助分割信息,进一步指导特征融合,增强模型对病变区域的精准定位能力。
本文目录
- 一 准备工作
- 1. 安装dynamic-network-architectures
- 2. 生成nnUNetPlans.json文件
- 二 修改思路
- 1. GAB模块结构
- 2. 查看 nnU-Net V2 网络结构
- 3. 替换过程
- 三 修改网络
- 1. 加入GAB类
- 2. 在编码器部分加入GAB
一 准备工作
1. 安装dynamic-network-architectures
点击链接,将其clone到本地后,进入文件夹内,pip install -e . 即可(注意-e后有个点)。
2. 生成nnUNetPlans.json文件
运行nnUNetv2_plan_and_preprocess命令,也是预处理命令,生成nnUNetPlans.json文件。
二 修改思路
1. GAB模块结构
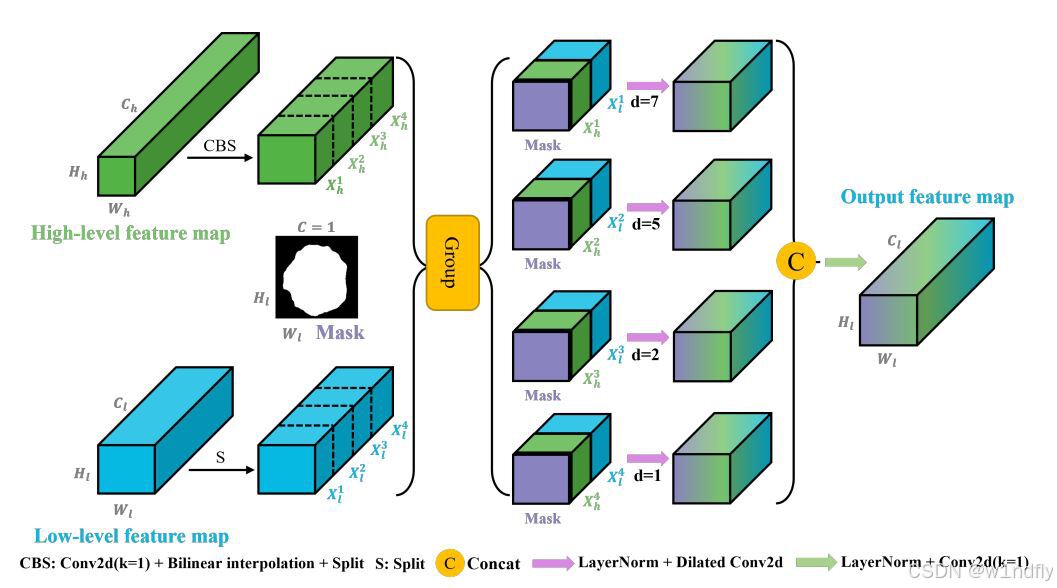
GAB模块接受三个特征图,分别是高层次特征图、低层次特征图、mask特征图,其中,前两个只相差一层。
对高层次特征图依次进行卷积层、线性插值、沿通道维度分割 三个操作。对低层次特征图沿通道维度分割 一个操作。分割操作都均分成4份,取高层次特征图的一份、低层次特征图的一份、mask特征图,沿通道维度拼接(cat)后,通过layernorm层 + 空洞卷积层。将处理过的、新的4份特征图沿通道维度拼接(cat)后,通过layernorm层 + 卷积层。最后返回特征图。
2. 查看 nnU-Net V2 网络结构
打开nnUNet \ DATASET \ nnUNet_preprocessed \ Dataset001_ACDC \ nnUNetPlans.json文件,查看configurations --> 2d --> architecture --> network_class_name字段,默认为dynamic_network_architectures.architectures.unet.PlainConvUNet。
根据network_class_name字段,找到PlainConvUNet类所在文件:dynamic-network-architectures-main \ dynamic_network_architectures \ architectures \ unet.py
PlainConvUNet类就是nnU-Net默认的U-Net,其结构由编码器和解码器两部分组成,很标准,很常见。具体代码、结构见PlainConvUNet类
3. 替换过程
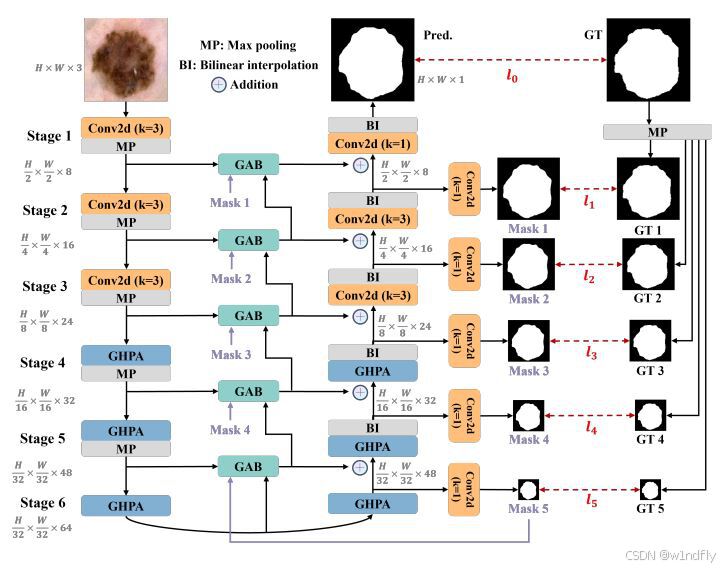
与上一篇不同,GAB模块更改了原有U-Net的跳跃连接,对特征图的传播顺序有较大改变。
由上图可知,GAB模块在下采样与上采样的连接部分,但与之前介绍的U-Net V2不同,GAB模块需要上采样(解码器)产生的mask特征图,
因此,我们将修改位置定在编码器部分。本文修改思路如下:
- 加入GAB类
- 在编码器部分加入GAB
三 修改网络
本次替换的一些设置
| 训练配置 | 2d |
| 更换的网络 | 加入EGE-UNet的GAB模块 |
涉及的文件(加粗文件是要修改的文件):
dynamic_network_architectures/
|__ architectures/
| |__ resnet.py
| |__ unet.py
| |__ vgg.py
|__ building_blocks/
| |__ helper.py
| |__ plain_conv_encoder.py
| |__ regularization.py
| |__ residual.py
| |__ residual_encoders.py
| |__ simple_conv_blocks.py
| |__ unet_decoder.py
| |__ unet_residual_decoder.py
|__ initialization/
| |__ weight_init.py
本次修改为了定位修改位置,会粘贴额外的代码用于定位,替换部分会用注释标识
1. 加入GAB类
打开dynamic-network-architectures \ dynamic_network_architectures \ building_blocks \ simple_conv_blocks.py文件,加入下面的代码:
class GAB(nn.Module):
def __init__(self, dim_xh, dim_xl, dim_mask, k_size=3, d_list=[1,2,5,7]):
super().__init__()
self.pre_project = nn.Conv2d(dim_xh, dim_xl, 1)
group_size = dim_xl // 2
self.g0 = nn.Sequential(
LayerNorm(normalized_shape=group_size+dim_mask, data_format='channels_first'),
nn.Conv2d(group_size + dim_mask, group_size + dim_mask, kernel_size=3, stride=1,
padding=(k_size+(k_size-1)*(d_list[0]-1))//2,
dilation=d_list[0], groups=group_size + dim_mask)
)
self.g1 = nn.Sequential(
LayerNorm(normalized_shape=group_size+dim_mask, data_format='channels_first'),
nn.Conv2d(group_size + dim_mask, group_size + dim_mask, kernel_size=3, stride=1,
padding=(k_size+(k_size-1)*(d_list[1]-1))//2,
dilation=d_list[1], groups=group_size + dim_mask)
)
self.g2 = nn.Sequential(
LayerNorm(normalized_shape=group_size+dim_mask, data_format='channels_first'),
nn.Conv2d(group_size + dim_mask, group_size + dim_mask, kernel_size=3, stride=1,
padding=(k_size+(k_size-1)*(d_list[2]-1))//2,
dilation=d_list[2], groups=group_size + dim_mask)
)
self.g3 = nn.Sequential(
LayerNorm(normalized_shape=group_size+dim_mask, data_format='channels_first'),
nn.Conv2d(group_size + dim_mask, group_size + dim_mask, kernel_size=3, stride=1,
padding=(k_size+(k_size-1)*(d_list[3]-1))//2,
dilation=d_list[3], groups=group_size + dim_mask)
)
self.tail_conv = nn.Sequential(
LayerNorm(normalized_shape=dim_xl * 2 + 4 * dim_mask, data_format='channels_first'),
nn.Conv2d(dim_xl * 2 + 4 * dim_mask, dim_xl, 1)
)
def forward(self, xh, xl, mask):
xh = self.pre_project(xh)
xh = F.interpolate(xh, size=[xl.size(2), xl.size(3)], mode ='bilinear', align_corners=True)
xh = torch.chunk(xh, 4, dim=1)
xl = torch.chunk(xl, 4, dim=1)
x0 = self.g0(torch.cat((xh[0], xl[0], mask), dim=1))
x1 = self.g1(torch.cat((xh[1], xl[1], mask), dim=1))
x2 = self.g2(torch.cat((xh[2], xl[2], mask), dim=1))
x3 = self.g3(torch.cat((xh[3], xl[3], mask), dim=1))
x = torch.cat((x0,x1,x2,x3), dim=1)
x = self.tail_conv(x)
return x
考虑到原版代码中的mask通道数为1,而nnU-Net V2输出的mask通道数(类别数目)不一定为1,所以对GAB类进行了适当修改,加入了dim_mask参数,用于扩展原先的1通道。
2. 在编码器部分加入GAB
打开dynamic-network-architectures \ dynamic_network_architectures \ building_blocks \ unet_decoder.py文件,修改UNetDecoder类。
首先是__init__函数,需要实例化多个GAB(一层一个),在__init__函数任意位置加入下面代码:
############################### GAB 开始
gab = []
for s in range(1, n_stages_encoder):
gab.append(
GAB(dim_xh=encoder.output_channels[-s], dim_xl=encoder.output_channels[-(s + 1)],
dim_mask=self.num_classes)
)
self.gab = nn.ModuleList(gab)
############################### GAB 结束
然后是forward函数,将该函数内的for循环内修改为如下代码:
for s in range(len(self.stages)):
encoder_x_h, encoder_x_l = lres_input, skips[-(s+2)]
# 首先反卷积扩大一倍
decoder_x_l = self.transpconvs[s](encoder_x_h)
# 再通过一个普通的卷积层获取mask
if self.deep_supervision:
mask_feature = self.seg_layers[s](decoder_x_l)
seg_outputs.append(mask_feature)
elif s == (len(self.stages) - 1):
mask_feature = self.seg_layers[-1](decoder_x_l)
seg_outputs.append(mask_feature)
# 将三部分输入GAB,获取新的低层次特征图
encoder_x_l = self.gab[s](encoder_x_h, encoder_x_l, mask_feature)
# 逐元素相加
decoder_x_l = torch.add(encoder_x_l, decoder_x_l)
lres_input = decoder_x_l
encoder_x_h = encoder_x_l
修改完毕