intelrealsense深度相机产品介绍
视频截图记录
注意:
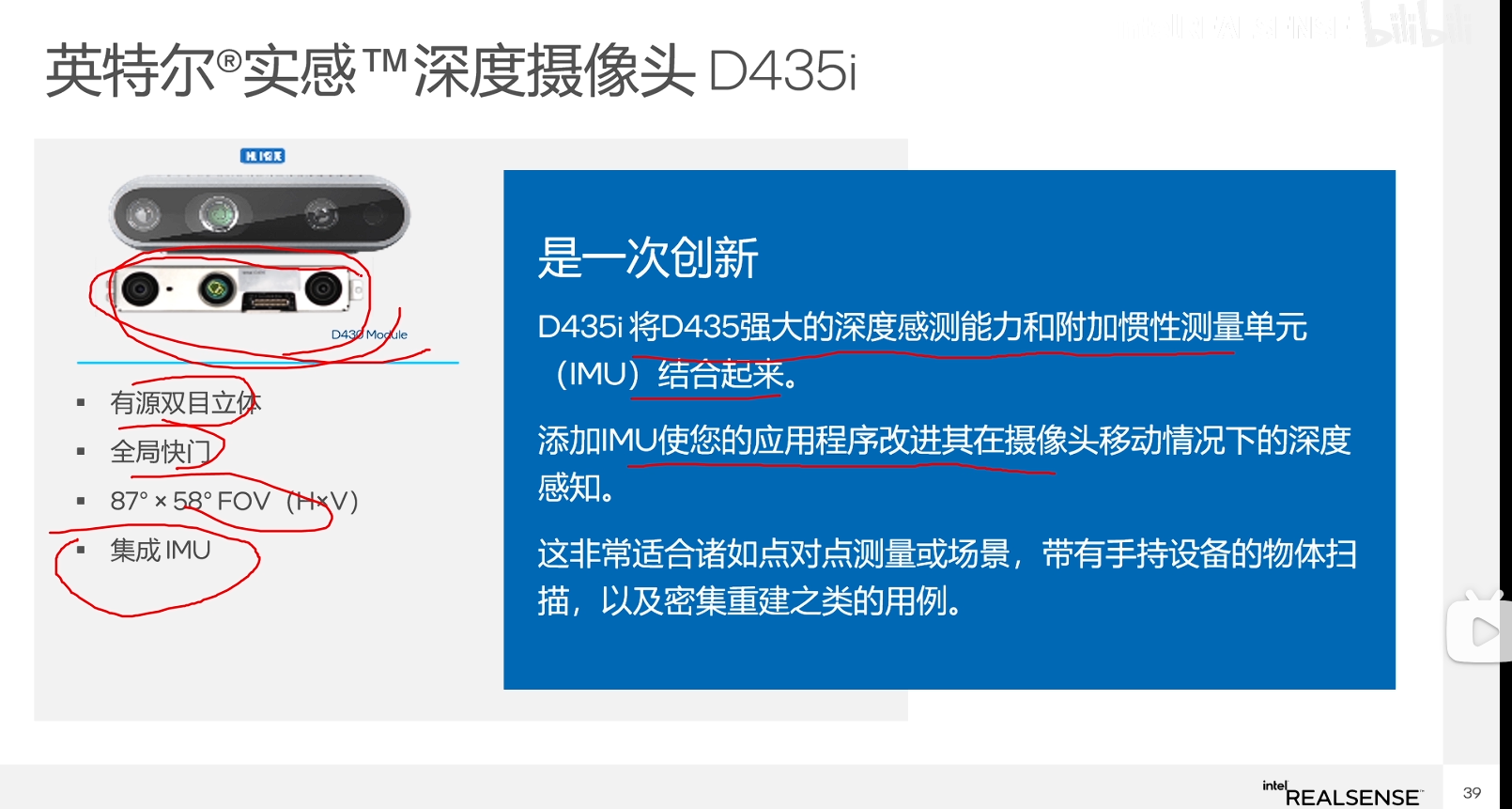
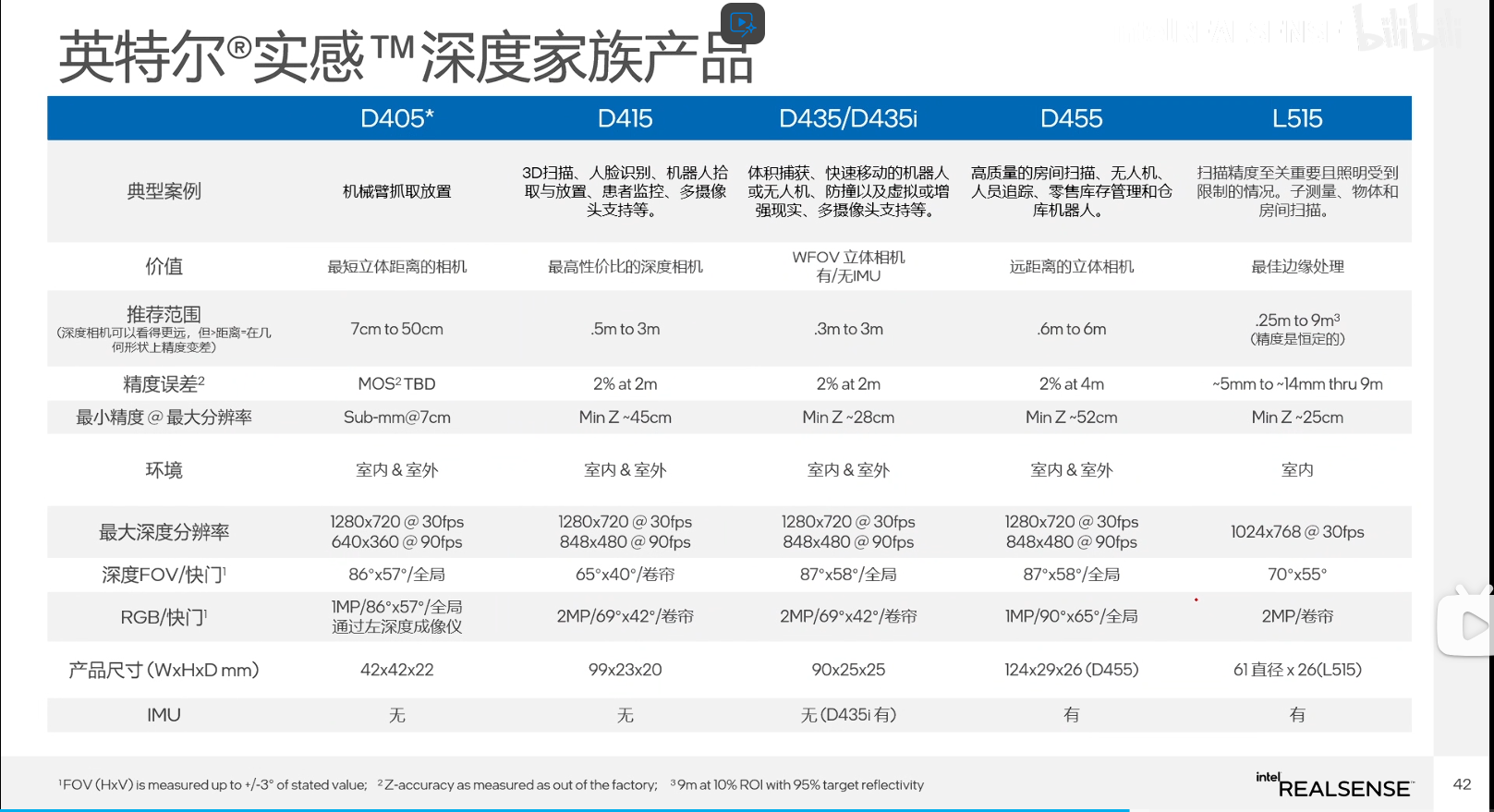
针对深度相机d453i: 深度FOV 87°x58°, 而RGB FOV 69°x42°, 因此当深度图对齐于彩色图时,并不会完全对齐,深度图范围更大,彩色图范围更小。 对于D455,由于彩色图的FOV大于深度图的FOV,因此 彩色图 画面可以 包括 深度图画面。

参考资料:
【20210729直播回看】《用3D了解世界》Intel RealSense 英特尔实感深度技术交流线上活动 双目相机 激光雷达 多传感器融合人脸认证_哔哩哔哩_bilibili