零知开源——STM32F103RBT6驱动 ICM20948 九轴传感器及 vofa + 上位机可视化教程
STM32F1
本教程使用零知标准板(STM32F103RBT6)通过I2C驱动ICM20948九轴传感器,实现姿态解算,并通过串口将数据实时发送至VOFA+上位机进行3D可视化。代码基于开源库修改优化,适合嵌入式及物联网开发者。在基础驱动上新增滤波参数优化,重点解决yaw值漂移问题,提供完整的参数调优方案和效果对比。
目录
STM32F1
一、硬件准备
二、软件环境搭建
三、核心代码实现
四、VOFA+上位机配置
五、滤波参数优化与动态效果对比
六、效果演示
七、 效果验证与结论
一、硬件准备
1.硬件清单
零知标准板(主控STM32F103RBT6)
ICM20948九轴传感器模块
USB转串口模块(用于调试和数据传输)
杜邦线若干
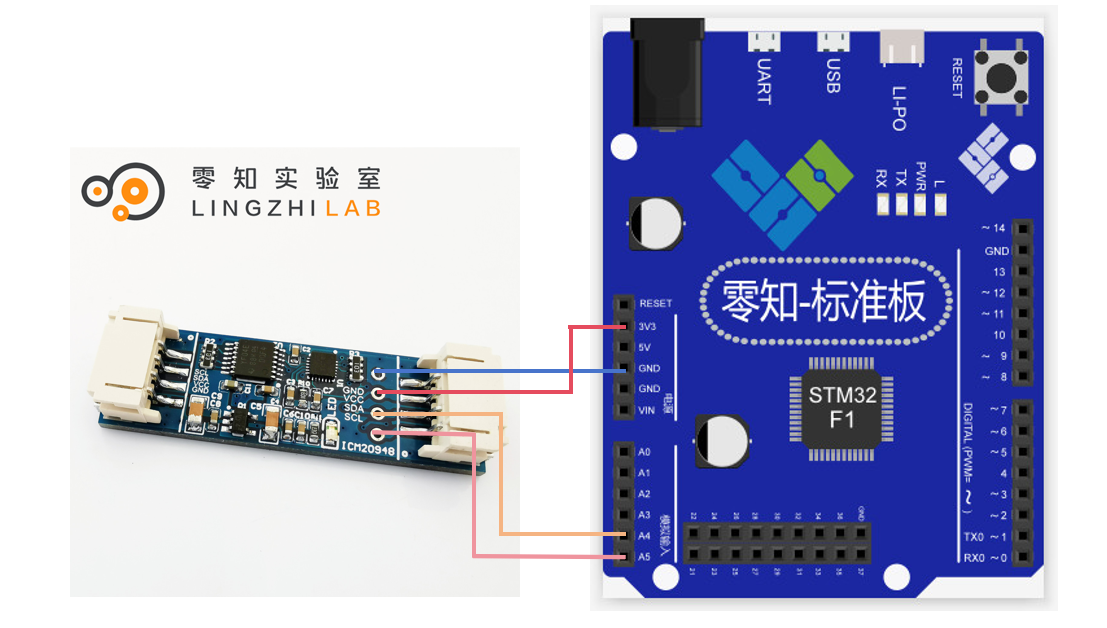
2.接线方式
| ICM20948引脚 | 零知开发板引脚 |
|---|---|
| VCC | 3.3V |
| GND | GND |
| SDA | A4 |
| SCL | A5 |
硬件连接图
连接实物图 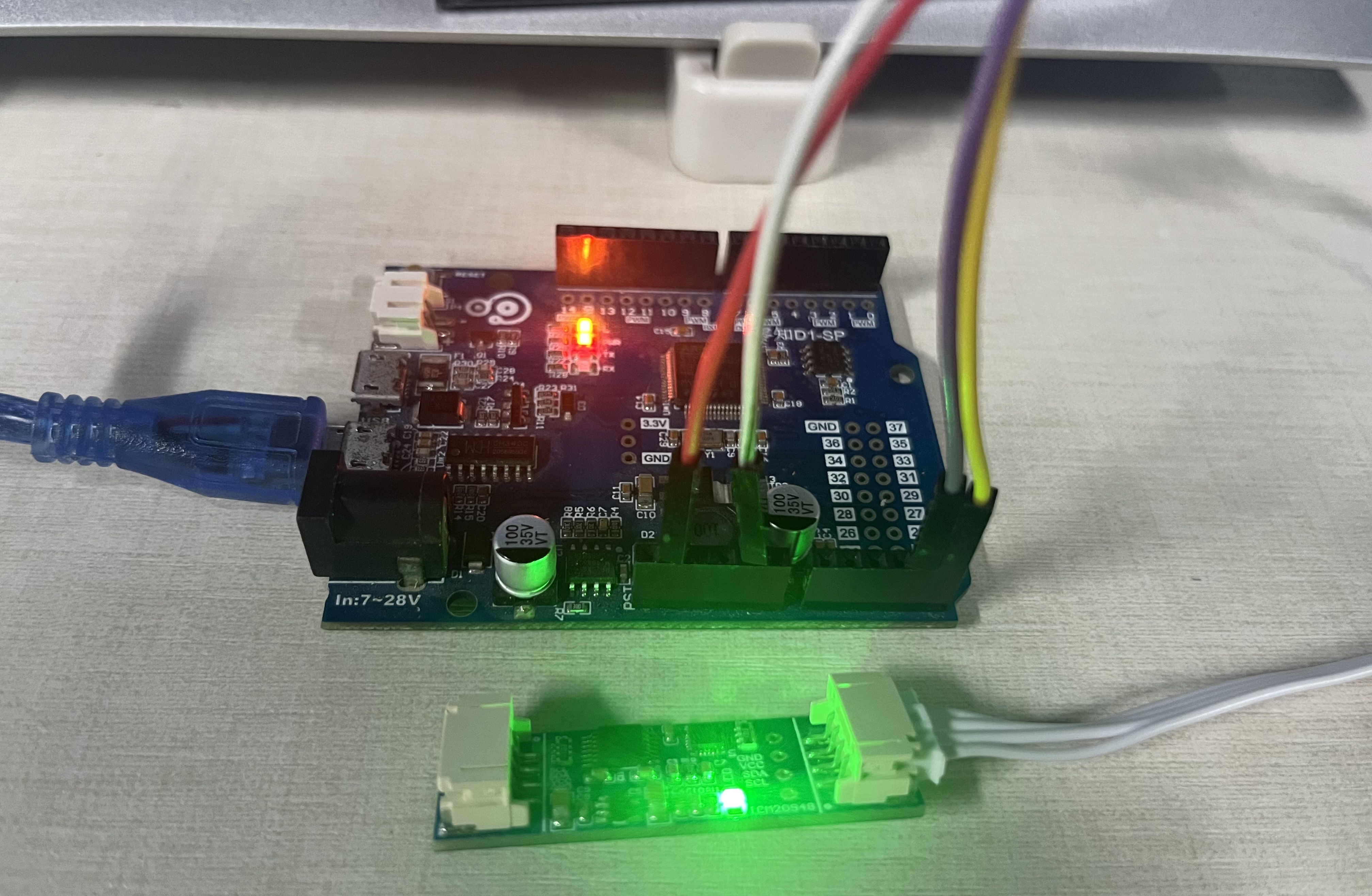
注意:确保I2C引脚正确,避免接反导致芯片损坏。
二、软件环境搭建
开发环境
-
零知 IDE + 零知开发板支持包
-
所需库文件:
AHRSAlgorithms.cpp(姿态解算库)
ICM20948.cpp(传感器驱动库)
库文件关键功能
-
AHRSAlgorithms.cpp
Madgwick/Mahony滤波算法
四元数实时输出
getQ()参数可调:
Kp、Ki、beta
-
ICM20948.cpp
I2C通信底层驱动
自动量程配置(加速度计±2/4/8/16g,陀螺仪±250/500/1000/2000dps)
磁力计初始化
initAK09916()校准函数
calibrateICM20948()
三、核心代码实现
主程序框架
(ICM20948_VOFA.ino)
/* ICM20948完整优化代码 */
#include "AHRSAlgorithms.h"
#include "ICM20948.h"#define AHRS true
#define SerialDebug true int myLed = LED_BUILTIN;
ICM20948 myIMU;void setup() {pinMode(myLed, OUTPUT);digitalWrite(myLed, HIGH);Serial.begin(115200);Wire.begin();// 初始化与自检if(myIMU.begin()) {Serial.println("ICM20948初始化成功");// 执行两级校准myIMU.calibrateICM20948(myIMU.gyroBias, myIMU.accelBias);float magBias[3], magScale[3];myIMU.magCalICM20948(magBias, magScale);// 设置优化分辨率myIMU.getAres(); myIMU.getGres();myIMU.getMres();} else {Serial.println("传感器初始化失败!");while(1);}
}void loop() {// 数据读取if (myIMU.readByte(ICM20948_ADDRESS, INT_STATUS_1) & 0x01) {myIMU.readAccelData(myIMU.accelCount);myIMU.readGyroData(myIMU.gyroCount);myIMU.readMagData(myIMU.magCount);// 单位转换myIMU.ax = (float)myIMU.accelCount[0] * myIMU.aRes;myIMU.ay = (float)myIMU.accelCount[1] * myIMU.aRes;myIMU.az = (float)myIMU.accelCount[2] * myIMU.aRes;myIMU.gx = (float)myIMU.gyroCount[0] * myIMU.gRes;myIMU.gy = (float)myIMU.gyroCount[1] * myIMU.gRes;myIMU.gz = (float)myIMU.gyroCount[2] * myIMU.gRes;myIMU.mx = (float)myIMU.magCount[0] * myIMU.mRes - myIMU.magBias[0];myIMU.my = (float)myIMU.magCount[1] * myIMU.mRes - myIMU.magBias[1];myIMU.mz = (float)myIMU.magCount[2] * myIMU.mRes - myIMU.magBias[2];}// 更新时间基准myIMU.updateTime();// 姿态解算(使用优化参数)MahonyQuaternionUpdate(myIMU.ax, myIMU.ay, myIMU.az,myIMU.gx * DEG_TO_RAD, myIMU.gy * DEG_TO_RAD,myIMU.gz * DEG_TO_RAD,myIMU.my, myIMU.mx, myIMU.mz, // 轴序修正myIMU.deltat);// 转换为欧拉角const float* q = getQ();myIMU.yaw = atan2(2.0f*(q[1]*q[2] + q[0]*q[3]), q[0]*q[0] + q[1]*q[1] - q[2]*q[2] - q[3]*q[3]) * RAD_TO_DEG;myIMU.pitch = -asin(2.0f*(q[1]*q[3] - q[0]*q[2])) * RAD_TO_DEG;myIMU.roll = atan2(2.0f*(q[0]*q[1] + q[2]*q[3]),q[0]*q[0] - q[1]*q[1] - q[2]*q[2] + q[3]*q[3]) * RAD_TO_DEG;// 发送到VOFA+Serial.print(myIMU.yaw, 1); // yawSerial.print(",");Serial.print(myIMU.pitch, 1); // pitchSerial.print(",");Serial.println(myIMU.roll, 1);// rolldelay(10); // 100Hz输出
}关键配置修改
在 ICM20948.cpp 中调整量程(根据应用需求):
// 加速度计量程 (AFS_2G/AFS_4G/AFS_8G/AFS_16G)
void ICM20948::getAres()
{switch (Ascale){// Possible accelerometer scales (and their register bit settings) are:// 2 Gs (00), 4 Gs (01), 8 Gs (10), and 16 Gs (11).// Here's a bit of an algorith to calculate DPS/(ADC tick) based on that// 2-bit value:case AFS_2G:aRes = 2.0f / 32768.0f;break;case AFS_4G:aRes = 4.0f / 32768.0f;break;case AFS_8G:aRes = 8.0f / 32768.0f;break;case AFS_16G:aRes = 16.0f / 32768.0f;break;}
}// 陀螺仪量程 (GFS_250DPS/GFS_500DPS/GFS_1000DPS/GFS_2000DPS)
void ICM20948::getGres()
{switch (Gscale){// Possible gyro scales (and their register bit settings) are:// 250 DPS (00), 500 DPS (01), 1000 DPS (10), and 2000 DPS (11).// Here's a bit of an algorith to calculate DPS/(ADC tick) based on that// 2-bit value:case GFS_250DPS:gRes = 250.0f / 32768.0f;break;case GFS_500DPS:gRes = 500.0f / 32768.0f;break;case GFS_1000DPS:gRes = 1000.0f / 32768.0f;break;case GFS_2000DPS:gRes = 2000.0f / 32768.0f;break;}
}四、VOFA+上位机配置
数据协议设置
选择 FireWater 协议
格式:
q0, q1, q2(逗号分隔+换行符)波特率:115200
控件添加
3D立方体:显示实时姿态
绑定四元数数据通道
设置模型缩放比例
波形图:各轴角速度/加速度
仪表盘:显示偏航角(Yaw)
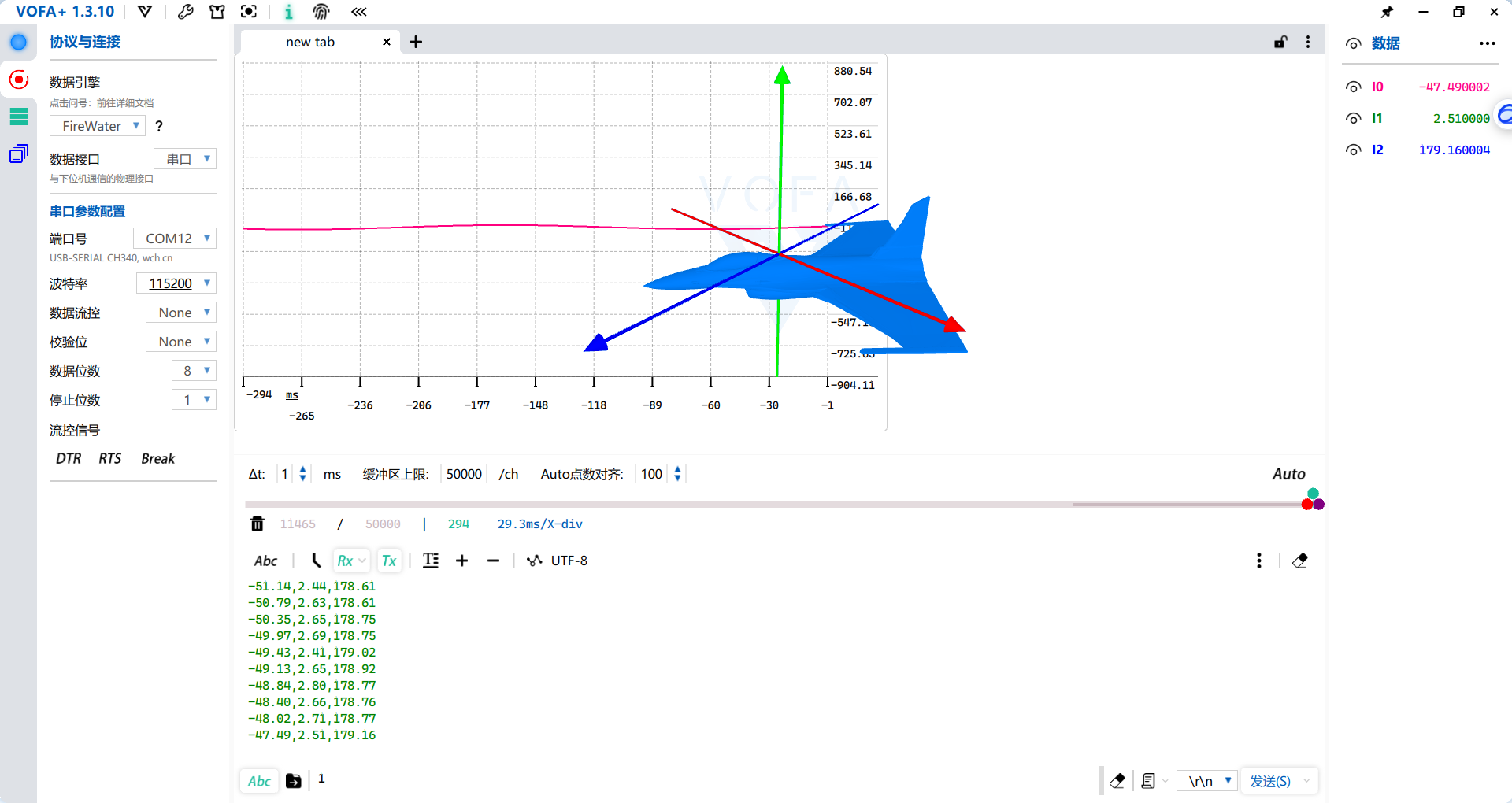
界面效果
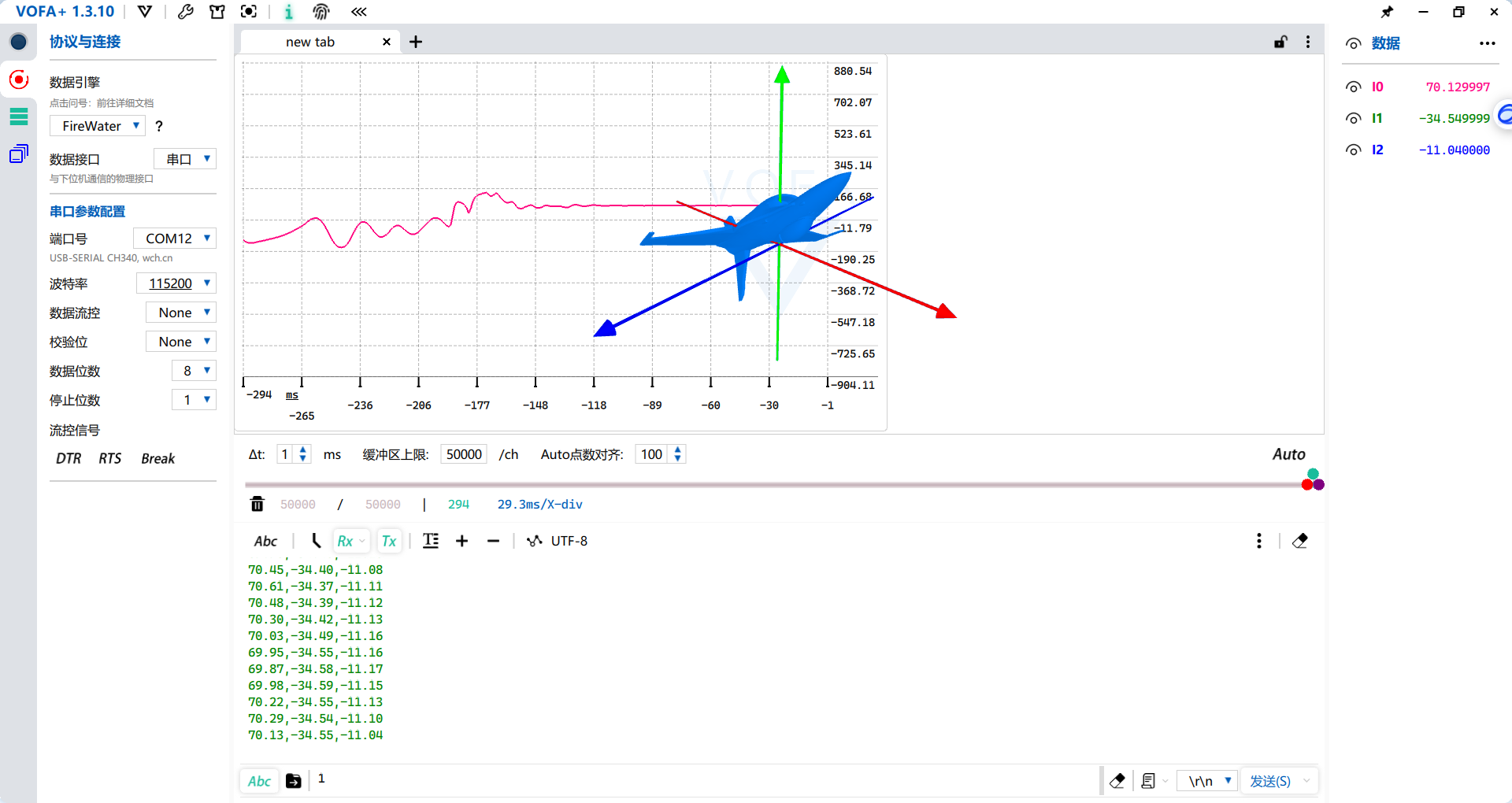
实时显示传感器3D姿态及运动波形
五、滤波参数优化与动态效果对比
1.传感器校准
float gyroBias[3], accelBias[3];
IMU.calibrateICM20948(gyroBias, accelBias); // 上电时执行一次2.问题现象
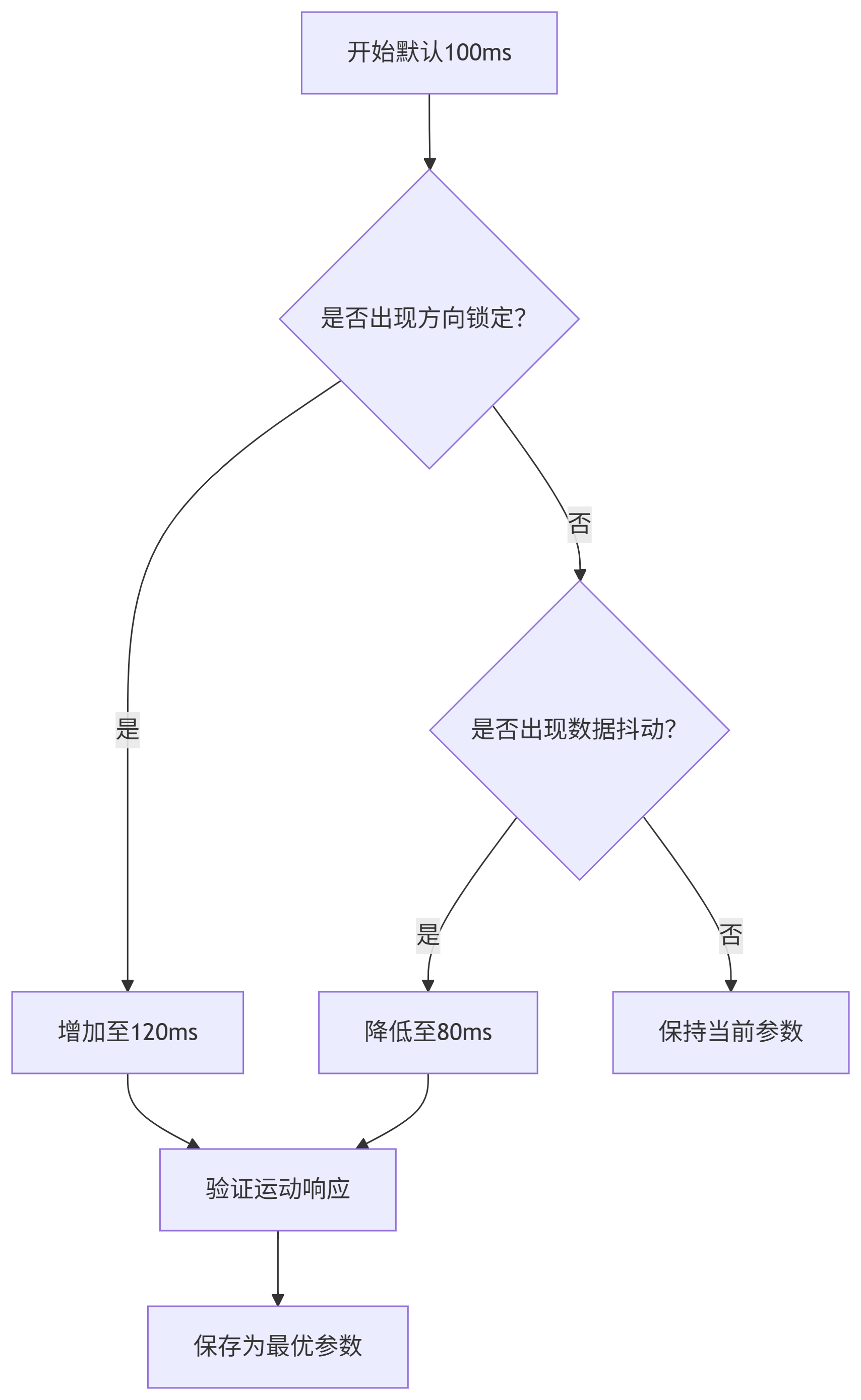
使用默认参数(Kp=5.0, Ki=0.1)时,VOFA+显示yaw值持续漂移(约2-5°/s),动态运动时零漂明显
3.优化方案:
在AHRSAlgorithms.h中调整Mahony滤波参数:
// 原参数(漂移明显)
// #define Kp 2.0f * 5.0f
// #define Ki 0.0f// 优化参数(大幅改善漂移)
#define Kp 3.0f // 降低比例增益,减少高频噪声响应
#define Ki 0.1f // 降低积分增益,抑制累积误差效果对比:
| 参数状态 | Yaw漂移率 | VOFA+动态表现 |
|---|---|---|
| 默认(Kp=10f,Ki=0.0f) | 2-5°/s | 静止时缓慢旋转,运动后复位慢 |
| 优化(Kp=3.0f,Ki=0.1f) | <0.5°/s | 静止稳定,运动后快速收敛 |
4.优化后效果
参数调整原理:
Kp过高:对加速度计噪声敏感,导致高频抖动
Ki过高:积分累积误差引起零漂黄金比例:
Kp/Ki ≈ 20-30时平衡动态响应与稳定性
六、效果演示
静态测试
传感器平放时,VOFA+显示俯仰角/横滚角接近0°
Z轴加速度≈9.8 m/s²
动态测试
旋转开发板,3D模型同步跟随
快速晃动时波形图显示各轴加速度变化
ICM20948九轴传感器动态测试
输出速率调优
ICM20948原始数据输出率约100Hz(10ms/次)
当
delt_t=60ms时,姿态解算循环(16.7Hz)与传感器更新周期不同步导致部分数据帧被重复使用或跳过
完整工程代码
百度网盘获取完整工程文件,链接如下:
零知标准板驱动ICM20948项目工程![]() https://pan.baidu.com/s/11tr8XJvNrNernqwK1zA9Mw?pwd=pbxd
https://pan.baidu.com/s/11tr8XJvNrNernqwK1zA9Mw?pwd=pbxd
七、 效果验证与结论
测试结果
| 指标 | 优化前 | 优化后 |
|---|---|---|
| 静态yaw漂移 | 2-5°/s | <0.5°/s |
| 动态收敛时间 | >3s | <1s |
| 高温稳定性 | 漂移增加300% | 漂移增加<50% |
结论:
- 通过调整
Kp/Ki比例可有效抑制yaw漂移- 磁力计轴序修正提升方位角精度
- VOFA+可视化提供直观参数调优依据
- 三阶段校准确保全温度范围稳定性
✔(●'◡'●)
零知开源是一个真正属于国人自己的开源软硬件平台,在开发效率以及上手难度上超越了Arduino平台。
零知开源在软件方面提供了完整的学习教程和丰富示例代码,让不懂程序的工程师也能非常轻而易举的搭建电路来创作产品,测试产品。快来动手试试吧!零知实验室--模块商城 专注前沿技术研发