Ros(俩不同包的节点 交流 topic message)
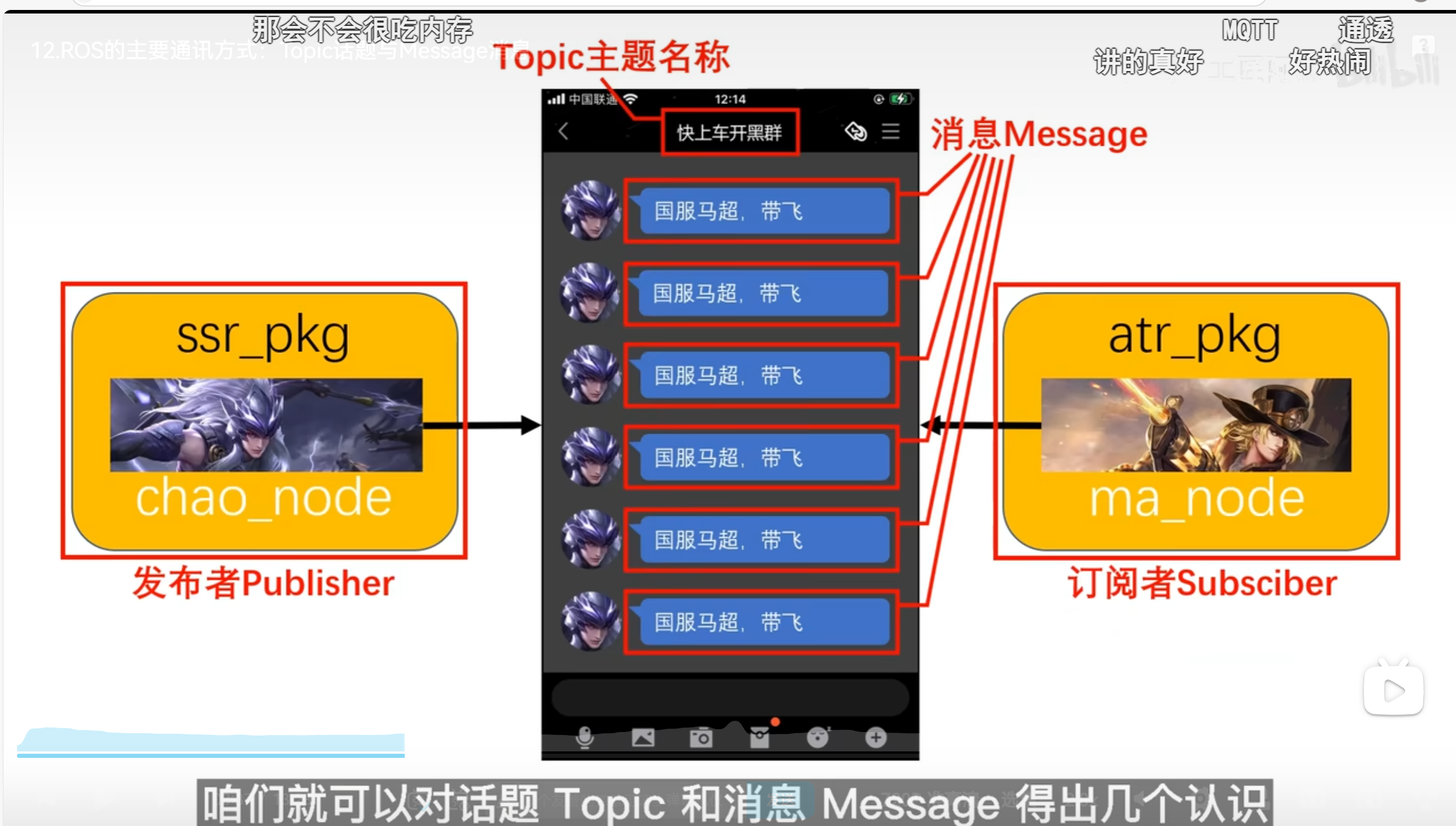
不同的俩节点 如chao_node 和ma_node .在俩不同的包下。
他们若想互相产生联系, 就需要靠这个关系了。
想象一下是开黑的场景 其实群名就是topic 而发送的消息就是Message。
其中主动刷屏的message的一方 就是 Publisher 而接受的那一方 就是subsciber
不同的俩节点 如chao_node 和ma_node .在俩不同的包下。
他们若想互相产生联系, 就需要靠这个关系了。
想象一下是开黑的场景 其实群名就是topic 而发送的消息就是Message。
其中主动刷屏的message的一方 就是 Publisher 而接受的那一方 就是subsciber