振动力学:有阻尼单自由度系统
文章1中的无阻尼系统是一种理想化的系统,实际应用中的振动系统总是受到阻尼影响。本文采用线性阻尼元件描述阻尼作用。
1. 振动方程的解
根据文章1中的式(1.4),可知有阻尼单自由度系统的振动方程为:
m u ¨ ( t ) + c u ˙ ( t ) + k u ( t ) = 0 ( 4.1 ) m \ddot{u}(t) + c\dot{u}(t) +k u(t) = 0 \qquad (4.1) mu¨(t)+cu˙(t)+ku(t)=0(4.1)
初始条件:
u ( 0 ) = u 0 , u ˙ ( 0 ) = u ˙ 0 ( 4.1 ′ ) u(0) = u_0, \;\; \dot{u}(0) = \dot{u}_0 \quad (4.1') u(0)=u0,u˙(0)=u˙0(4.1′)
根据常微分方程理论,上述控制方程的解具有如下形式:
u ( t ) = u ˉ e s t u(t) = \bar{u} \mathrm{e}^{st} u(t)=uˉest
代入式(4.1),得到特征方程:
m s 2 + c s + k = 0 ms^2 + cs +k =0 ms2+cs+k=0
可解得特征根:
s 1 , 2 = − c 2 m ± ( c 2 m ) 2 − k m ( 4.4 ) s_{1,2} = - \frac{c}{2m} \pm \sqrt{\left( \frac{c}{2m} \right)^2 - \frac{k}{m}} \qquad (4.4) s1,2=−2mc±(2mc)2−mk(4.4)
为方便分析,引入一个无量纲量 ξ \xi ξ,称为阻尼比:
ξ = c 2 m / k m = c 2 m ω n = c c c \xi = \frac{c}{2m} \Big / \sqrt{\frac{k}{m}} = \frac{c}{2m \omega_{\rm n}} = \frac{c}{c_c} ξ=2mc/mk=2mωnc=ccc
式中, ω n \omega_{\rm n} ωn是文章1中引入的固有圆频率。 c c c_c cc称为临界阻尼系数, c c = 2 m ω n c_c = 2m\omega_{\rm n} cc=2mωn。于是式(4.4)进一步写为:
s 1 , 2 = − ξ ω n ± ω n ξ 2 − 1 ( 4.6 ) s_{1,2} = -\xi \omega_{\rm n} \pm \omega_{\rm n}\sqrt{\xi^2 - 1} \qquad (4.6) s1,2=−ξωn±ωnξ2−1(4.6)
显然根据根式内 ξ 2 − 1 \xi^2 -1 ξ2−1的取值情况,式(4.6)将给出不同的根,可为实数根或复数根,需要分别讨论过阻尼、临界阻尼、欠阻尼,这三种情况。
2. 过阻尼
当 ξ > 1 \xi >1 ξ>1,式(4.6)是一对互异的实数根,此时振动方程(4.1)的通解为:
u ( t ) = a 1 e ( − ξ + ξ 2 − 1 ) ω n t + a 2 e ( − ξ − ξ 2 − 1 ) ω n t ( 4.7 ) u(t) = a_1 \mathrm{e}^{(-\xi + \sqrt{\xi^2 -1})\omega_{\rm n} t } + a_2 \mathrm{e}^{(-\xi - \sqrt{\xi^2 -1})\omega_{\rm n} t } \qquad (4.7) u(t)=a1e(−ξ+ξ2−1)ωnt+a2e(−ξ−ξ2−1)ωnt(4.7)
式中, a 1 , a 2 a_1,a_2 a1,a2由初始条件确定。根据初始条件(4.1’),可解得式(4.7)在 t = 0 t=0 t=0时,常数为:
a 1 = u ˙ 0 + ( ξ + ξ 2 − 1 ) ω n u 0 2 ω n ξ 2 − 1 , a 2 = − u ˙ 0 − ( ξ − ξ 2 − 1 ) ω n u 0 2 ω n ξ 2 − 1 a_1 = \frac{\dot{u}_0+ (\xi + \sqrt{\xi^2-1})\omega_{\rm n} u_0}{2\omega_{\rm n} \sqrt{\xi^2-1}}, \;\; a_2 = \frac{-\dot{u}_0- (\xi - \sqrt{\xi^2-1})\omega_{\rm n} u_0}{2\omega_{\rm n} \sqrt{\xi^2-1}} a1=2ωnξ2−1u˙0+(ξ+ξ2−1)ωnu0,a2=2ωnξ2−1−u˙0−(ξ−ξ2−1)ωnu0
将常数 a 1 , a 2 a_1,a_2 a1,a2代入式(4.7)即得到过阻尼情况时的振动位移函数。图1是过阻尼条件下(取 ξ = 1.1 \xi = 1.1 ξ=1.1)的一个典型时间历程,运动规律按指数衰减(虚线为指数函数 e s 1 t \mathrm{e}^{s_1t} es1t的曲线),没有振荡特性。
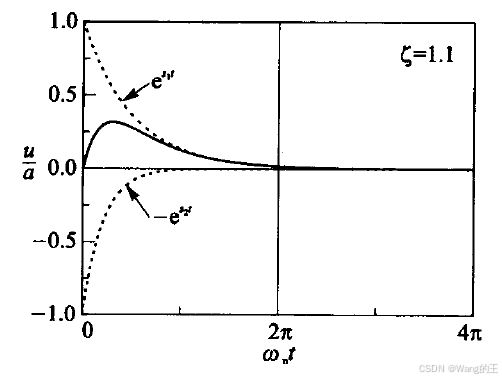
图1 过阻尼( ξ = 1.1 \xi = 1.1 ξ=1.1)情况下的位移时间历程(自由衰减运动)
3. 临界阻尼
继续第2节的讨论,临界阻尼情况下 ξ = 1 \xi=1 ξ=1,此时式(4.6)为两个相同的实根:
s 1 , 2 = − ω n ( 4.9 ) s_{1,2} = -\omega_{\rm n} \qquad (4.9) s1,2=−ωn(4.9)
于是通解为:
u ( t ) = ( a 1 + a 2 t ) e − ω n t ( 4.10 ) u(t) = (a_1 + a_2 t) \mathrm{e}^{-\omega_{\rm n} t} \qquad (4.10) u(t)=(a1+a2t)e−ωnt(4.10)
根据初始条件(4.1’),可解得式(4.10)在 t = 0 t=0 t=0时,常数为:
a 1 = u 0 , a 2 = u ˙ 0 + ω n u 0 a_1 = u_0, \;\; a_2 = \dot{u}_0 + \omega_{\rm n} u_0 a1=u0,a2=u˙0+ωnu0
将 a 1 , a 2 a_1,a_2 a1,a2代回式(4.10),得到临界阻尼情况下的位移函数。这种运动也按指数规律衰减,没有振荡特征,如图2所示,实现是一个典型的位移时间历程曲线。
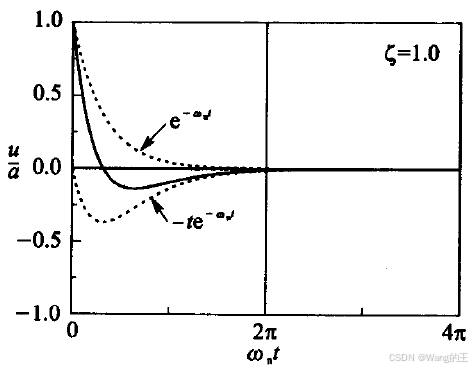
图2 临界阻尼( ξ = 1 \xi = 1 ξ=1)情况下的位移时间历程(自由衰减运动)
4. 欠阻尼
在实际应用中,欠阻尼振动是一种普遍情况。此时 0 < ξ < 1 0< \xi < 1 0<ξ<1(一般 ξ < 0.2 \xi < 0.2 ξ<0.2),特征根是一对共轭复数根,式(4.6)为:
s 1 , 2 = − ξ ω n ± j ω n 1 − ξ 2 ( 4.12 ) s_{1,2} = -\xi \omega_{\rm n} \pm {\rm j} \omega_{\rm n} \sqrt{1-\xi^2} \qquad (4.12) s1,2=−ξωn±jωn1−ξ2(4.12)
振动方程式(4.1)的通解为:
u ( t ) = e − ξ ω n t [ a 1 cos ( ω d t ) + a 2 sin ( ω d t ) ] ( 4.13 ) u(t) = \mathrm{e}^{-\xi \omega_{\rm n} t} \left[a_1 \cos(\omega_{\rm d} t)+ a_2 \sin(\omega_{\rm d} t) \right] \qquad (4.13) u(t)=e−ξωnt[a1cos(ωdt)+a2sin(ωdt)](4.13)
式中:
ω d = ω n 1 − ξ 2 ( 4.13 ′ ) \omega_{\rm d} = \omega_{\rm n} \sqrt{1-\xi^2} \qquad (4.13') ωd=ωn1−ξ2(4.13′)
称为振动系统的阻尼振动频率。显然, ω d < ω n \omega_{\rm d} < \omega_{\rm n} ωd<ωn。
根据初始条件(4.1’),可解得式(4.13)在 t = 0 t=0 t=0时,常数为:
a 1 = u 0 , a 2 = u ˙ 0 + ξ ω n u 0 ω d a_1 = u_0, \;\; a_2 = \frac{\dot{u}_0 + \xi \omega_{\rm n} u_0}{\omega_{\rm d}} a1=u0,a2=ωdu˙0+ξωnu0
将 a 1 , a 2 a_1,a_2 a1,a2代回式(4.13),得到欠阻尼情况下的位移函数。这里将其完整形式写出来:
u ( t ) = e − ξ ω n t [ u 0 cos ( ω d t ) + u ˙ 0 + ξ ω n u 0 ω d sin ( ω d t ) ] = U ( t ) u 0 + V ( t ) u ˙ 0 ( 4.16 ) u(t) = \mathrm{e}^{-\xi \omega_{\rm n} t} \left[u_0 \cos(\omega_{\rm d} t)+ \frac{\dot{u}_0 + \xi \omega_{\rm n} u_0}{\omega_{\rm d}} \sin(\omega_{\rm d} t) \right] = U(t) u_0 + V(t) \dot{u}_0 \qquad (4.16) u(t)=e−ξωnt[u0cos(ωdt)+ωdu˙0+ξωnu0sin(ωdt)]=U(t)u0+V(t)u˙0(4.16)
式中, U ( t ) U(t) U(t)和 V ( t ) V(t) V(t)分别定义为单位初始位移和单位初速度引起的自由振动位移。
根据三角变化,式(4.16)还可写为:
u ( t ) = a e − ξ ω n t sin ( ω n t + φ ) ( 4.18 ) u(t) = a \mathrm{e}^{-\xi \omega_{\rm n} t} \sin ({\omega_{\rm n} t + \varphi}) \qquad (4.18) u(t)=ae−ξωntsin(ωnt+φ)(4.18)
式中,振幅 a a a和初相位 φ \varphi φ为:
a = u 0 2 + ( u ˙ 0 + ξ ω n u 0 ω d ) 2 , φ = arctan ω d u 0 u ˙ 0 + ξ ω n u 0 ( 4.19 ) a = \sqrt{u_0^2 + \left( \frac{\dot{u}_0 + \xi \omega_{\rm n} u_0}{\omega_{\rm d}} \right)^2}, \;\; \varphi = \arctan{\frac{\omega_{\rm d}u_0}{\dot{u}_0 + \xi \omega_{\rm n} u_0}} \qquad (4.19) a=u02+(ωdu˙0+ξωnu0)2,φ=arctanu˙0+ξωnu0ωdu0(4.19)
图3是一个典型的欠阻尼情况位移时程曲线,位移在系统平衡位置附近往复振动,但是振幅不断衰减(不属于周期振动)。实际的振动系统,一般 ξ < 0.2 \xi < 0.2 ξ<0.2。
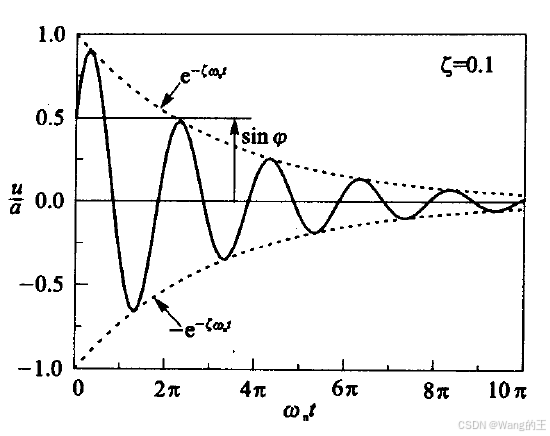
图3 欠阻尼振动( ξ = 0.1 \xi = 0.1 ξ=0.1)位移时程曲线
5. 振动的特性
我们在实际应用中的阻尼振动,大多是指欠阻尼振动。阻尼振动的特性如下:
(1)阻尼系统的自由振动振幅按照指数规律 e − ξ ω n t \mathrm{e}^{-\xi \omega_{\rm n} t} e−ξωnt衰减。
(2)等时性:阻尼振动的自由振动式非周期运动,但是其相邻两次沿同一方向经过平衡位置的时间间隔(可从图3中观察这种间隔)均为:
T d = 2 π ω d = 2 π ω n 1 − ξ 2 = T n 1 − ξ 2 ( 4.20 ) T_{\rm d} = \frac{2 \pi}{\omega_{\rm d}} = \frac{2\pi}{\omega_{\rm n} \sqrt{1-\xi^2}} = \frac{T_{\rm n}}{\sqrt{1-\xi^2}} \qquad (4.20) Td=ωd2π=ωn1−ξ22π=1−ξ2Tn(4.20)
式中, T d T_{\rm d} Td称为阻尼振动周期或自然周期,文章1中引入的固有周期 T n = 2 π / ω n T_{\rm n} = 2\pi/\omega_{\rm n} Tn=2π/ωn。显然,由于 ξ < 1 \xi < 1 ξ<1, T d > T n T_{\rm d} > T_{\rm n} Td>Tn。
(3)当阻尼比 ξ \xi ξ非常小时,阻尼振动周期 T d T_{\rm d} Td(或阻尼振动频率 ω d \omega_{\rm d} ωd)与固有周期 T n T_{\rm n} Tn(或固有频率 ω n \omega_{\rm n} ωn)差别很小。
(4)引入振幅对数衰减率 δ \delta δ来描述振幅衰减快慢,定义为经过一个阻尼振动周期 T d T_{\rm d} Td的相邻两个振幅之比的自然对数:
δ = ln e − ξ ω n t e − ξ ω n ( t + T d ) = ξ ω n T d \delta = \ln\frac{\mathrm{e}^{-\xi \omega_{\rm n}t}}{\mathrm{e}^{-\xi \omega_{\rm n}(t + T_{\rm d})}} = \xi \omega_{\rm n} T_{\rm d} δ=lne−ξωn(t+Td)e−ξωnt=ξωnTd
从式(4.20)可知, ω n T d = 2 π / 1 − ξ 2 \omega_{\rm n} T_{\rm d} = 2\pi/\sqrt{1-\xi^2} ωnTd=2π/1−ξ2。于是,可知 δ \delta δ可由 ξ \xi ξ表达,即 δ \delta δ完全取决于 ξ \xi ξ。图5展示了 ξ \xi ξ- δ \delta δ曲线,且虚线为阻尼比 ξ \xi ξ非常小时的情况,可简化为 δ = 2 π ξ \delta = 2\pi \xi δ=2πξ。当 ξ > 0.4 \xi>0.4 ξ>0.4时,这种近似的误差就比较大了。
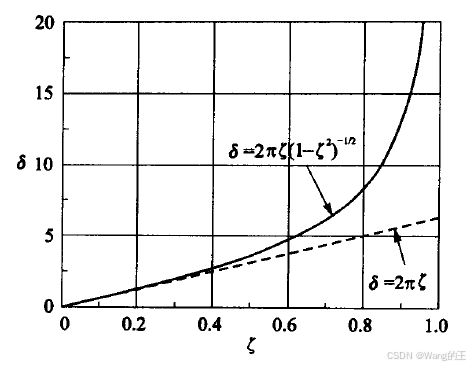
图5 振幅对数衰减率和阻尼比的关系( ξ \xi ξ- δ \delta δ曲线)
参考资料
文章1:振动力学:无阻尼单自由度系统
胡海岩. 机械振动基础. 北京航空航天大学出版社. 2005