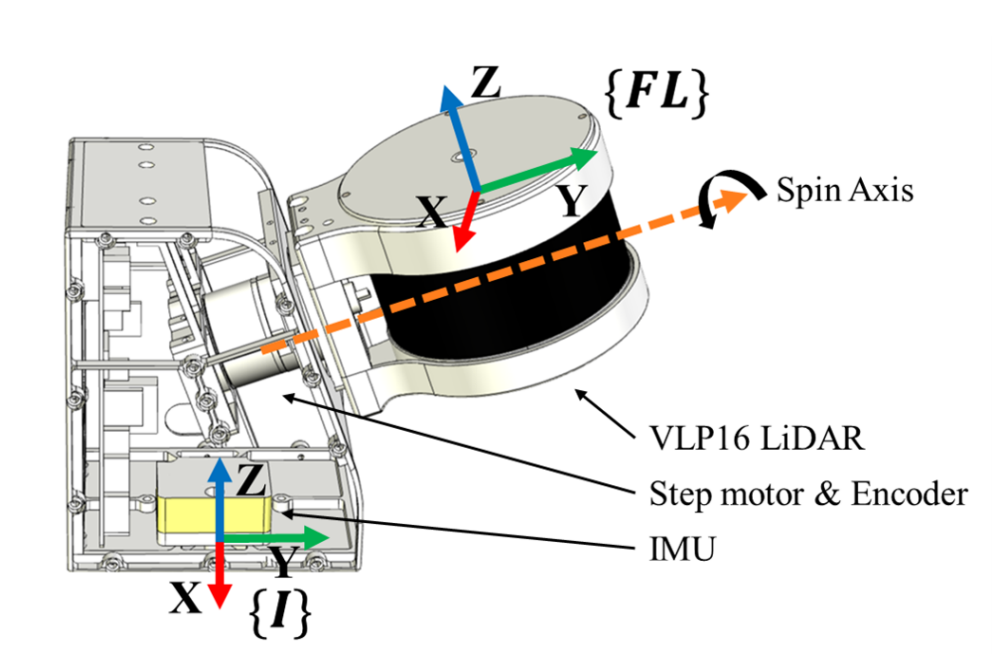
spining-lidar的电机和激光雷达体(lidar-imu)之间的标定
一、使用的是面结构标定
也就是用场景中的面结构来约束标定。
二、电机转轴和激光雷达之间的参数有哪些?
1.位置方面,显然,电机转轴是没有高度的,所以优化的相对量就是detax和detaY.
2.角度方面,显然,一开始无法确定电机码盘0位置所指向的实地场景位置,所以优化参数只有rp两个角度。此时优化参数有4个。
3.如果零位角度有明确要求,则需要优化yaw角(内旋变换的yaw角)。则此时优化参数有5个。
三、spining-lidar的标定
标定的时候,可以让lidar先处于电机编码的0位置,
1.lidar和imu的标定:电机不转,先进行imu-lidar之间的标定,得到一系列参数
2.电机转轴和lidar-imu的初值计算。根据设计值,计算出来电机和imu之间的初始角度。当然位置这时候仍然假设激光雷达中心和电机转轴垂直的面 交于电机转轴的点为电机转轴的中心点。
3.电机转轴和lidar-imu 的相对位姿精确确定。 还是用平面结构来做约束。具体的,假设一点位于激光雷达坐标系中,然后通过激光雷达和电机之间的旋转和平移计算出来 点在电机转轴坐标系下的位置,然后根据电机转轴和IMU之间的旋转和平移矩阵计算出来,点在imu坐标系下的点位。这样使用平面约束构建方程,计算旋转和平移矩阵。