AI与智能驾驶的关系和原理:技术融合与未来展望-优雅草卓伊凡一、AI大模型基础原理与智能驾驶
AI与智能驾驶的关系和原理:技术融合与未来展望-优雅草卓伊凡
一、AI大模型基础原理与智能驾驶
1.1 AI大模型的核心架构
本内容由优雅草木心为卓伊凡提供技术辅助讲解,毕竟木心目前正在比亚迪。

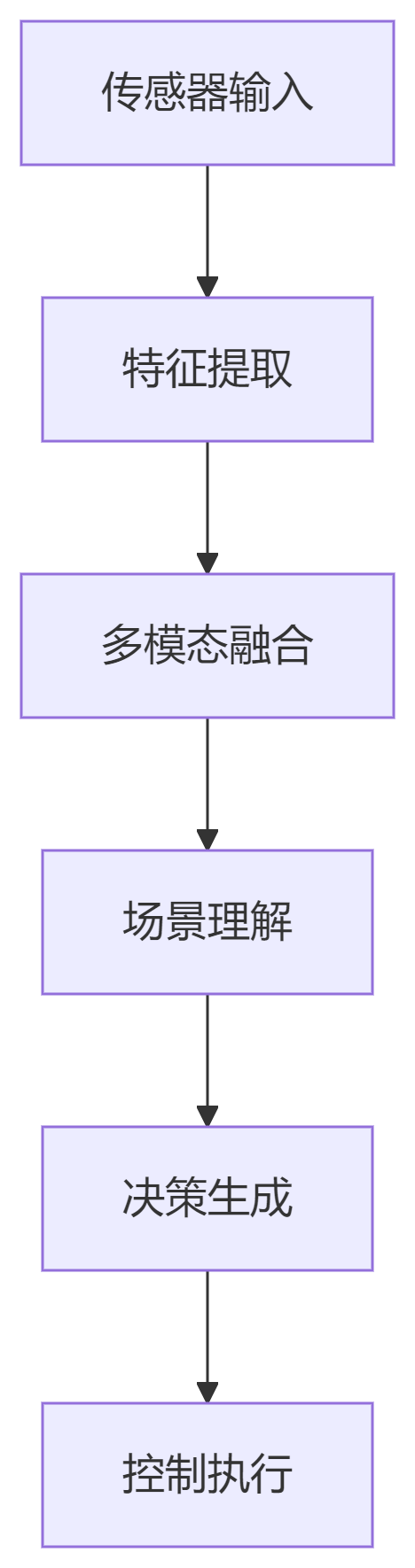
人工智能大模型是基于深度学习的复杂神经网络系统,其核心在于海量参数和多层次抽象表示。现代AI大模型通常采用Transformer架构,通过自注意力机制处理序列数据,在智能驾驶领域,这种能力被用于处理来自多种传感器的时序数据流。
关键技术组成:
- 编码器-解码器结构:用于场景理解和决策生成
- 多头注意力机制:同时关注不同区域的特征
- 位置编码:保持空间信息的完整性
- 残差连接:防止深层网络梯度消失
1.2 汽车障碍物识别专项模型
智能驾驶中的障碍物识别是一个多任务学习问题,需要同时解决:
- 目标检测:定位障碍物位置(2D/3D边界框)
- 语义分割:理解每个像素的类别属性
- 运动预测:估计障碍物未来轨迹
- 风险评估:计算碰撞概率和危险程度
典型模型架构:
class ObstacleDetectionModel(nn.Module):def __init__(self):super().__init__()self.backbone = ResNet50() # 特征提取self.detection_head = DetectionHead() # 目标检测self.segmentation_head = SegmentationHead() # 语义分割self.motion_head = MotionPredictHead() # 运动预测self.fusion_layer = CrossModalAttention() # 多传感器融合def forward(self, camera, lidar, radar):features = self.fusion_layer(camera, lidar, radar)detections = self.detection_head(features)segmentation = self.segmentation_head(features)motion = self.motion_head(features)return detections, segmentation, motion二、智能驾驶领域开源大模型盘点
2.1 主流开源模型概览
| 模型名称 | 开发机构 | 主要特点 | 开源地址 |
| BEVFormer | 商汤科技 | 鸟瞰图视角转换 | GitHub |
| CenterPoint | MIT | 点云目标检测 | GitHub |
| FIERY | Wayve | 端到端驾驶策略 | GitHub |
| TransFuser | MPI-IS | 多模态融合 | GitHub |
| UniAD | 香港大学 | 统一自动驾驶框架 | GitHub |
2.2 关键模型解析
BEVFormer工作流程:
- 多摄像头输入图像
- 通过Transformer提取特征
- 转换为鸟瞰图(BEV)表示
- 时空融合历史帧信息
- 输出3D检测和地图分割结果
代码片段示例:
# BEVFormer 核心组件
bev_encoder = BEVEncoder(embed_dims=256,num_cams=6,pc_range=[-51.2, -51.2, -5.0, 51.2, 51.2, 3.0],num_layers=6,num_points=32
)# 处理多摄像头输入
bev_feats = bev_encoder(img_feats, # 图像特征img_metas, # 相机参数lidar_feats=None
)三、AI与智能驾驶关系的两个核心比喻
3.1 比喻一:AI如老司机的大脑,传感器如感官系统
传统自动驾驶系统像是一个新手司机:
- 依赖硬编码规则(如”看到红灯必须停止”)
- 处理突发情况能力有限
- 需要明确清晰的输入信号
AI驱动的智能驾驶则如同经验丰富的老司机:
- 具备直觉判断能力
- 能够处理模糊和不确定情况
- 从经验中学习应对复杂场景
- 具备预测性思维(预判其他车辆行为)

3.2 比喻二:AI如交响乐指挥,硬件系统如乐团
智能驾驶系统就像一支交响乐团:
- 传感器是各种乐器(小提琴=摄像头,定音鼓=雷达等)
- 计算平台是乐谱架和演奏场地
- 控制执行器是演奏动作
- AI大模型则是乐团指挥
优秀指挥(AI)能够:
- 协调不同乐器(传感器融合)
- 把握整体节奏(行驶策略)
- 即时调整演奏(实时决策)
- 处理意外情况(突发应对)
四、智能驾驶作为专业Agent的演进路径
4.1 智能驾驶Agent的构成要素
| 组件 | 功能 | 实现技术 |
| 感知模块 | 环境理解 | 多模态融合神经网络 |
| 记忆模块 | 场景记录 | 高精地图+经验库 |
| 决策模块 | 路径规划 | 强化学习+博弈论 |
| 控制模块 | 车辆操控 | 模型预测控制 |
| 学习模块 | 持续改进 | 在线学习算法 |
4.2 发展阶段性特征
当前阶段(L2-L3):
- 特定场景下的自动驾驶
- 仍需人类监督
- 基于规则+AI混合系统
中期目标(L4):
- 限定区域完全自主
- 无需人类干预
- 纯数据驱动决策
终极形态(L5):
- 全场景通用驾驶智能体
- 具备人类级驾驶智慧
- 可解释的决策过程
4.3 技术挑战与突破方向
- 极端案例处理(Corner Cases)
-
- 建立更全面的测试场景库
- 发展小样本学习技术
- 多智能体交互
-
- 车与车之间的博弈策略
- 混合交通(人车共驾)协调
- 持续学习能力
-
- 避免灾难性遗忘
- 安全更新机制
- 能耗优化
-
- 模型轻量化
- 专用AI芯片设计
五、取代人类驾驶的技术必然性
5.1 客观优势分析
| 维度 | AI驾驶员 | 人类驾驶员 |
| 反应速度 | <100毫秒 | 500-1500毫秒 |
| 持续专注 | 无限时长 | 易疲劳 |
| 视野范围 | 360度无死角 | 约120度有效视野 |
| 情绪影响 | 绝对理性 | 易受情绪干扰 |
| 学习速度 | 分钟级更新 | 需要长期训练 |
5.2 商业化落地时间表
gantttitle 智能驾驶商业化进程dateFormat YYYYsection 技术准备期硬件标准化 :done, 2015, 2020算法框架形成 :done, 2018, 2022数据积累 :done, 2020, 2024section 商业应用期特定场景L4 :active, 2023, 2026城市道路L4 :2025, 2028全场景L5 :2028, 2035section 社会普及期成本下探 :2026, 2030法规完善 :2027, 2032全面取代 :2032, 20405.3 社会接受度培育路径
- 技术透明化
-
- 可视化决策过程
- 建立AI驾驶”黑匣子”
- 渐进式替代
-
- 从货运、出租等商业场景切入
- 逐步扩展至私家车领域
- 事故责任界定
-
- 完善保险体系
- 明确厂商责任边界
- 基础设施适配
-
- 车路协同系统建设
- 专用通信协议标准化
六、前沿研究方向与创新机遇
6.1 下一代技术突破点
- 神经符号系统:结合符号推理与神经网络
- 世界模型:构建驾驶场景的物理规律认知
- 类脑计算:仿生脉冲神经网络应用
- 量子机器学习:处理超复杂决策问题
6.2 中国企业的战略机遇
- 数据优势
-
- 复杂道路场景多样性
- 海量驾驶员行为数据
- 政策支持
-
- 新基建投资导向
- 标准制定参与权
- 产业协同
-
- 电动车产业链完整
- 5G通信领先优势
结语:迎接人机共驾的新纪元
智能驾驶技术的发展不是简单的人类驾驶员替代过程,而是交通出行方式的范式革命。AI大模型为这一变革提供了核心驱动力,使汽车从代步工具进化为真正的智能移动空间。正如优雅草科技卓伊凡所预见,这一转变虽需时日,但技术发展的内在逻辑决定了其必然性。
未来十年,我们将见证智能驾驶Agent从专业工具成长为通用伙伴的过程。这一进程中,既需要技术突破,也依赖社会共识;既追求商业价值,更需坚守安全底线。作为从业者,我们的使命是加速这一变革,同时确保其发展轨迹符合人类整体利益。智能驾驶的终极目标不是取代人类,而是解放人类——让我们从枯燥的驾驶任务中解脱,将精力投入到更有创造性的领域中去。