动态规划之网格图模型(一)
文章目录
- 动态规划之网格图模型(一)
- LeetCode 64. 最小路径和
- 思路
- Golang 代码
- LeetCode 62. 不同路径
- 思路
- Golang 代码
- LeetCode 63. 不同路径 II
- 思路
- Golang 代码
- LeetCode 120. 三角形最小路径和
- 思路
- Golang 代码
- LeetCode 3393. 统计异或值为给定值的路径数
- 思路
- Golang 代码
动态规划之网格图模型(一)

网格图是二维(乃至多维)DP 的典型应用场景。其基础模型可以归纳为:给定一个二维地图,从地图上的某个起点出发,到达终点有多少种可能方案(或是到达终点的最小代价是多少)。
LeetCode 64. 最小路径和
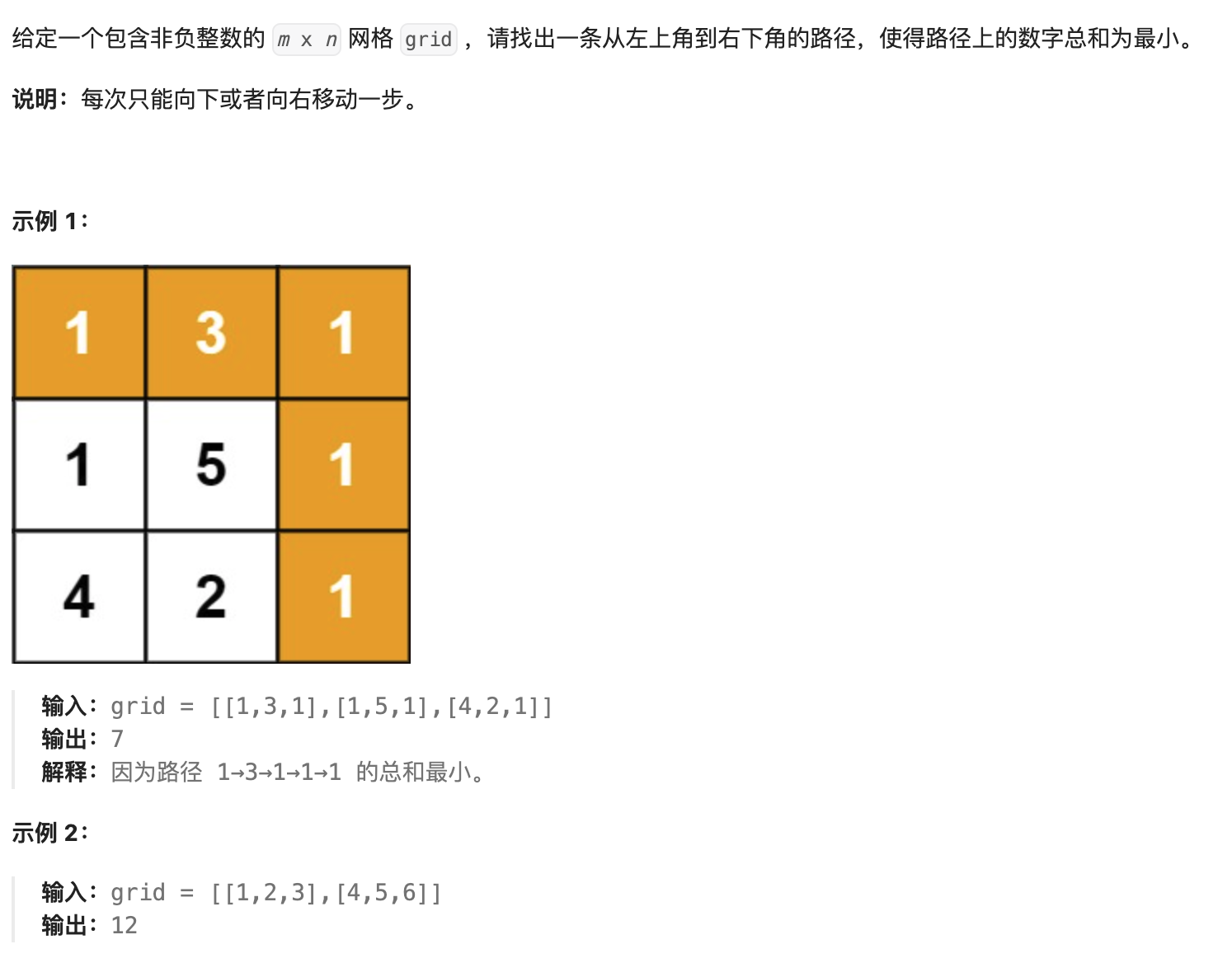
思路
题目要求我们寻找一个从左上角到右下角的最小代价,所以我们用二维数组dp[i][j]记录从起点出发到达每一个点(i, j)的最小代价,最终dp[m][n]就是答案。由于每次只能向下或向右移动,因此状态转移方程就是:dp[i][j] = min(dp[i - 1][j], dp[i][j - 1]) + grid[i - 1][j - 1]。
最重要的是处理边界情况,由于我们要求的是路径的最小代价,因此数组的维度开成(m + 1, n + 1),第零行和第零列的值设置为math.MaxInt,为了不在左上角进行特判,设置dp[0][1] = 0。
根据以上思路,我们进行编码。
Golang 代码
func minPathSum(grid [][]int) int {// 变量声明m, n := len(grid), len(grid[0])dp := make([][]int, m + 1)for i := 0; i <= m; i ++ {dp[i] = make([]int, n + 1)}// 设定初始状态for i := 0; i <= m; i ++ {dp[i][0] = math.MaxInt}for j := 0; j <= n; j ++ {dp[0][j] = math.MaxInt}dp[0][1] = 0// DPfor i := 1; i <= m; i ++ {for j := 1; j <= n; j ++ {dp[i][j] = min(dp[i - 1][j], dp[i][j - 1]) + grid[i - 1][j - 1]}}return dp[m][n]
}
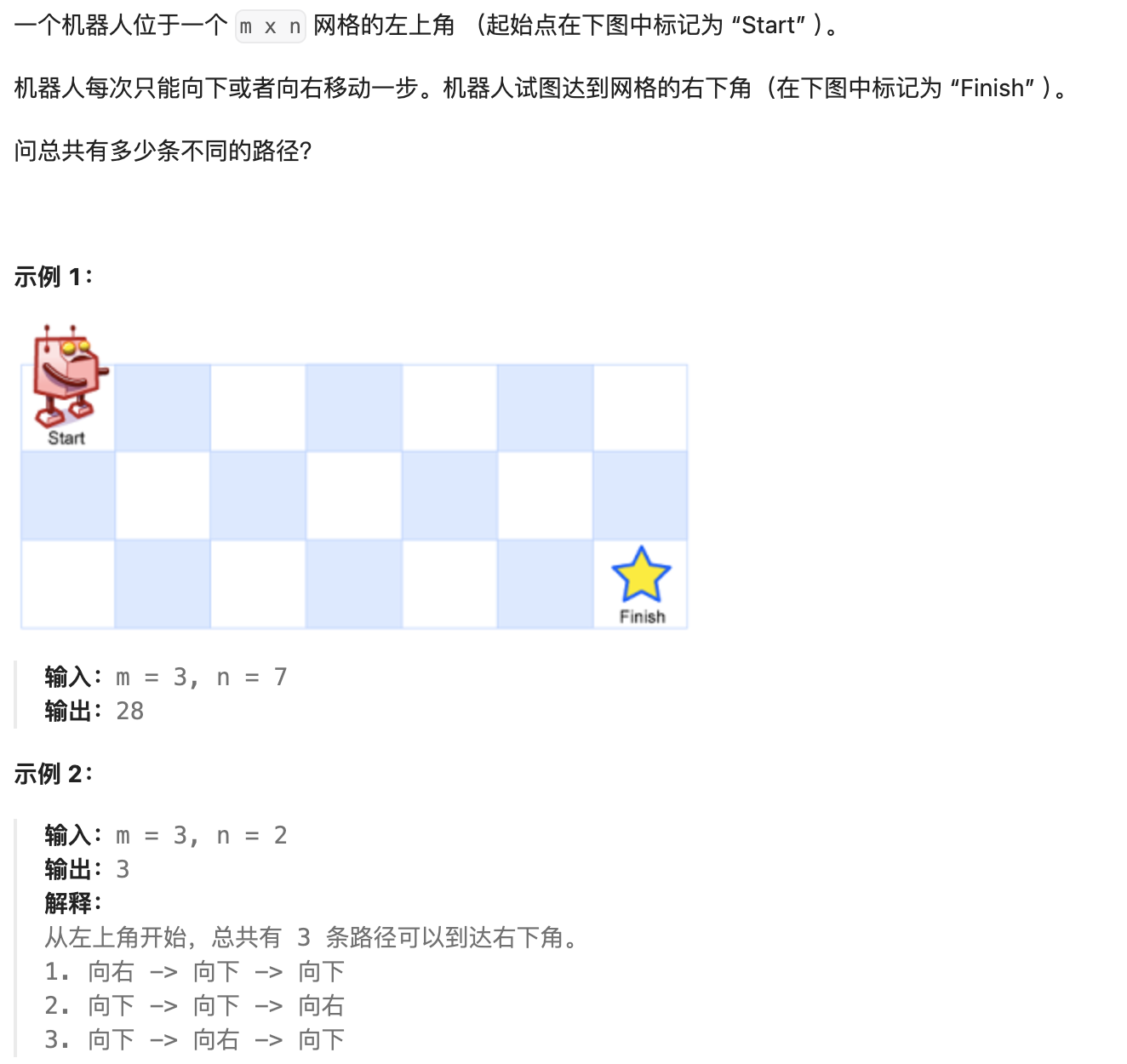
LeetCode 62. 不同路径
思路
不同路径与「LeetCode 64. 最小路径和」问题非常的相似。区别主要在于状态转移方程的不同。具体来说,使用二维数组dp来表示可能的状态数。dp[i][j]就是从起点出发到达(i, j)的可能状态数。
由于题目要求目标只能在某一点向下或向右移动,对于(i, j)而言,能够到达这一点只能从(i, j - 1)向右移动或是从(i - 1, j)向下移动,因此状态转移方程可以定义为:dp[i][j] = dp[i - 1][j] + dp[i][j - 1]。
初始情况的dp[1][1]应该被设置为 1,也就是如果终点与起点重合,那么可能的路径条数就是 1,为了避免处理左上角特判,令dp[0][1] = 1。
Golang 代码
func uniquePaths(m int, n int) int {dp := make([][]int, m + 1)for i := 0; i <= m; i ++ {dp[i] = make([]int, n + 1)}dp[0][1] = 1for i := 1; i <= m; i ++ {for j := 1; j <= n; j ++ {dp[i][j] = dp[i - 1][j] + dp[i][j - 1]}}return dp[m][n]
}
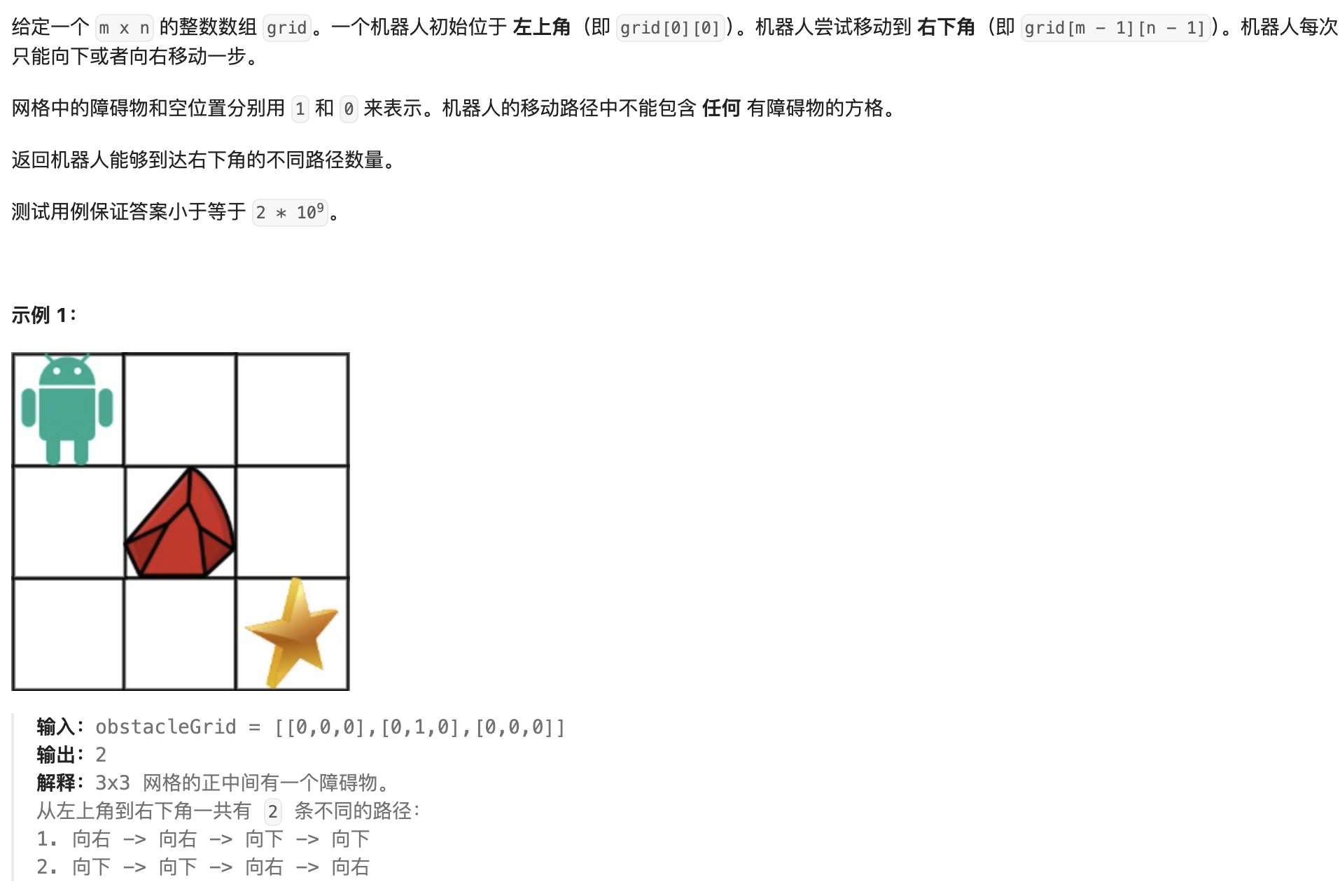
LeetCode 63. 不同路径 II
思路
本题是「LeetCode 62. 不同路径」的衍生题,在地图当中引入了障碍物,让我们继续求达到右下角的可能路径。
解决这类问题的思路仍然是关注状态转移方程与可能的特殊情况。先说状态转移方程:我们已经知道,在(i, j)这一点,可能的路径只能来自左侧或者上侧,如果左边或上边的一个恰为障碍物,则不需要统计来自于那一格的路径。如果(p, q)为障碍物,我们设置它的dp[p][q] = -1,由此可以得到状态转移方程:dp[i][j] = max(d[i - 1][j], dp[i][j - 1], dp[i - 1][j] + dp[i][j - 1])。
特殊情况仍然在左上角,设置dp[0][1] = 1避免左上角特判。
Golang 代码
func uniquePathsWithObstacles(obstacleGrid [][]int) int {m, n := len(obstacleGrid), len(obstacleGrid[0])dp := make([][]int, m + 1)for i := 0; i <= m; i ++ {dp[i] = make([]int, n + 1)}dp[0][1] = 1for i := 1; i <= m; i ++ {for j := 1; j <= n; j ++ {if obstacleGrid[i - 1][j - 1] == 1 {dp[i][j] = -1} else {dp[i][j] = max(dp[i - 1][j], dp[i][j - 1], dp[i - 1][j] + dp[i][j - 1])}}}if dp[m][n] == -1 {return 0} else {return dp[m][n]}
}
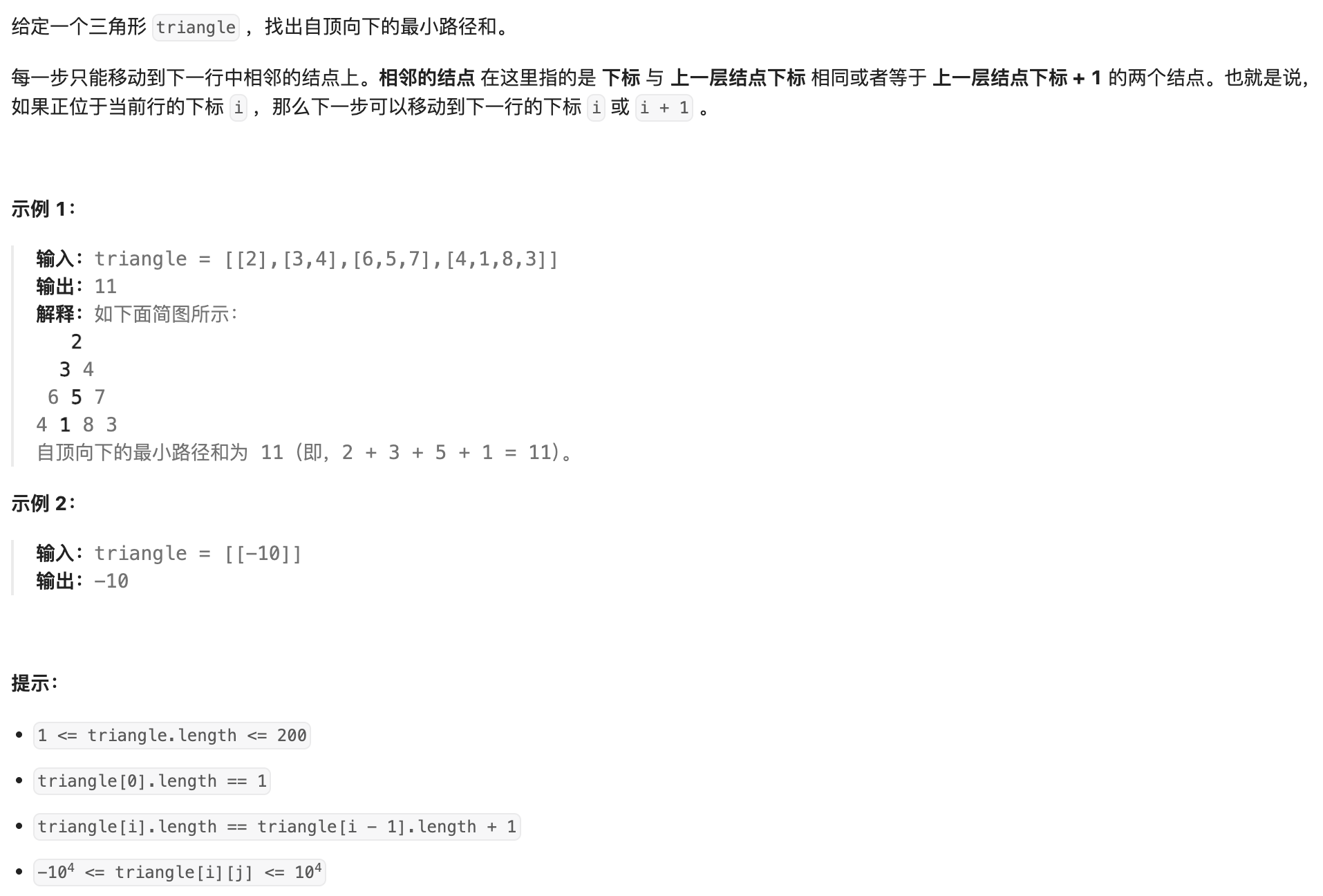
LeetCode 120. 三角形最小路径和
思路
非常经典的一道 DP 入门题,我比较喜欢采用自底向上的方式解决这道题。
具体来说,首先开一个 DP 数组,DP 数组也是三角形的。之后,直接使用三角形的最后一层来初始化 DP 数组的最后一层,从倒数第二层开始进行 DP,状态转移方程是:dp[i][j] = min(dp[i + 1][j], dp[i + 1][j + 1]) + triangle[i][j]。
最后dp[0][0]就是最终答案。
Golang 代码
func minimumTotal(triangle [][]int) int {n := len(triangle)dp := make([][]int, n)for i := 1; i <= n; i ++ {dp[i - 1] = make([]int, i)}for i := 0; i < n; i ++ {dp[n - 1][i] = triangle[n - 1][i]}for i := n - 2; i >= 0; i -- {for j := 0; j <= i; j ++ {dp[i][j] = min(dp[i + 1][j], dp[i + 1][j + 1]) + triangle[i][j]}}return dp[0][0]
}
LeetCode 3393. 统计异或值为给定值的路径数
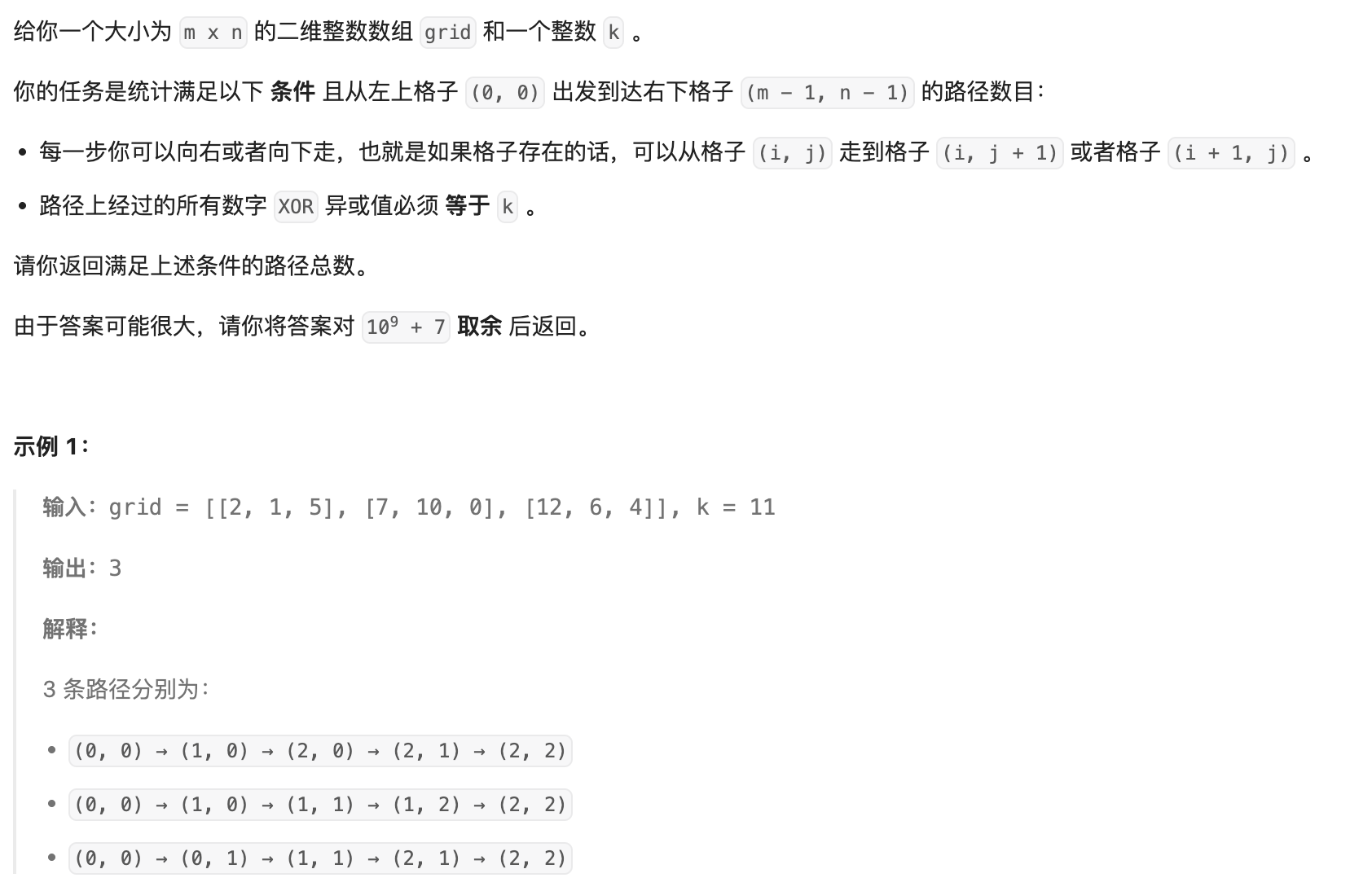
思路
这是五道题当中最难的那一道题。具体来说,它是另一个「路径统计」问题的变体,要求我们求出路径上所有数异或和为k的路径数目。因此我们在二维数组的基础上,引入第三个维度,用于记录当前路径的异或和是多少。
针对异或运算,一条特殊的性质是异或可以移项,比如对于x ^ y = k,可以移项变为x = y ^ k,利用这条性质,我们可以构建状态转移方程:dp[i][j][x] = dp[i - 1][j][x ^ grid[i - 1][j - 1]] + dp[i][j - 1][x ^ grid[i - 1][j - 1]]。
需要重点关注的问题是,上式中x的含义是什么?针对异或运算,很明显异或的最大值就是grid数组中最大的那个数的二进制位数全为 1 的值,假定这个值为u,如果k不小于u,那么答案就是 0,因为路径上的异或值不可能比异或的最大值还要大。x就是对u从 0 开始进行递增遍历,目的是查看是否有从起点到(i, j)到路径满足异或值为x,最重要搜索的异或值为k。
边界条件仍然在左上角,设置dp[0][1][0] = 1避免特判。
Golang 代码
func countPathsWithXorValue(grid [][]int, k int) int {const MOD int = 1e9 + 7m, n := len(grid), len(grid[0])maxx := 0for _, row := range grid {maxx = max(maxx, slices.Max(row))}u := 1 << bits.Len(uint(maxx)) // 求出异或可能的最大值if k >= u {return 0}dp := make([][][]int, m + 1)for i := 0; i <= m; i ++ {dp[i] = make([][]int, n + 1)for j := 0; j <= n; j ++ {dp[i][j] = make([]int, u)}}dp[0][1][0] = 1for i := 1; i <= m; i ++ {for j := 1; j <= n; j ++ {val := grid[i - 1][j - 1]for x := 0; x < u; x ++ {dp[i][j][x] = (dp[i - 1][j][x ^ val] + dp[i][j - 1][x ^ val]) % MOD}}}return dp[m][n][k] % MOD
}