驱动开发(2)|鲁班猫rk3568简单GPIO波形操控
上篇文章写了如何下载内核源码、编译源码的详细步骤,以及一个简单的官方demo编译,今天分享一下如何根据板子的引脚写自己控制GPIO进行高低电平反转。
想要控制GPIO之前要学会看自己的引脚分布图,我用的是鲁班猫RK3568,引脚分布图如下所示:

具体板子的引脚示意图可以在这里看:教程官网
1 通过shell命令进行GPIO控制
1.1 使用GPIO sysfs接口控制IO
#以下所有操作均需要打开管理者权限使用
#使能引脚GPIO1_A0
echo 32 > /sys/class/gpio/export#设置引脚为输入模式
echo in > /sys/class/gpio/gpio32/direction
#读取引脚的值
cat /sys/class/gpio/gpio32/value#设置引脚为输出模式
echo out > /sys/class/gpio/gpio32/direction
#设置引脚为低电平
echo 0 > /sys/class/gpio/gpio32/value
#设置引脚为高电平
echo 1 > /sys/class/gpio/gpio32/value#复位引脚
echo 32 > /sys/class/gpio/unexport
这里需要注意的是,设置引脚模式为输出模式之后才能对引脚高低电平进行设置,其他的没什么好主意的,多敲几遍啥都懂了。至于官方给的计算引脚的位置,我根本没看,因为图中都给你算好了,文章开头的引脚分布图中的编号一列就为引脚具体的值。
1.2 使用libgpiod控制IO
首先要下载libgpio:
sudo apt install gpiod
具体使用一共就这几个接口:

设置GPIO1_A1为高电平:
gpioset 1 1=1
设置GPIO1_A1为低电平:
gpioset 1 1=0
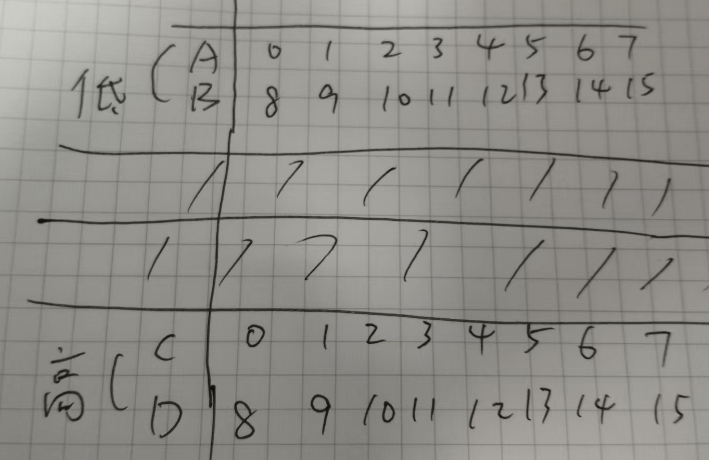
这里的gpioset后面第一个1是GPIO的组号,因为是GPIO1所以为1,我想换个板子一共五组(GPIO0-GPIO4),所以范围是0-4。第二个是索引号,具体计算方式可以参照下图:

2 通过代码来操控GPIO接口
2.1 通过GPIO 子系统设置引脚
直接使用gpio_set_value,这种方式与1.1类似,很简单,也是直接看引脚途中的编号就可以:
//设置GPIO1_A0为高电平
gpio_set_value(32,1);
//设置GPIO1_A0为低电平
gpio_set_value(32,0);
这种方式操作GPIO,就算直接拉高在拉低操作延时都会在500ns左右。
这是我写的部分代码,感兴趣的兄弟可以看一下:
pin_ctl.c:
#include "pin_ctl.h"void set_ce_high()
{gpio_set_value(GPIO_A1, data & 0x01);
}
static void set_pinA_value(u8 data, int signal)
{if(signal == 0){//如果是上电时序和下电时序0gpio_set_value(GPIO_A1, data & 0x01);}else{//不是上电时序,是选择喷头gpio_set_value(GPIO_A1, data & 0x01);gpio_set_value(GPIO_A2, (data >> 1) & 0x01);gpio_set_value(GPIO_A3, (data >> 2) & 0x01);gpio_set_value(GPIO_A4, (data >> 3) & 0x01);gpio_set_value(GPIO_A5, (data >> 4) & 0x01);gpio_set_value(GPIO_A6, (data >> 5) & 0x01);gpio_set_value(GPIO_A7, (data >> 6) & 0x01);}
}
static void set_pinD_value(u8 data, int signal)
{if(signal == 0){//如果是上电时序和下电时序0gpio_set_value(GPIO_D1, data & 0x01);}else{//不是上电时序gpio_set_value(GPIO_D1, data & 0x01);gpio_set_value(GPIO_D2, (data >> 1) & 0x01);gpio_set_value(GPIO_D3, (data >> 2) & 0x01);gpio_set_value(GPIO_D4, (data >> 3) & 0x01);}}
static void set_pinS_value(u8 data, int signal)
{if(signal == 0){//如果是上电时序和下电时序0gpio_set_value(GPIO_S1, data & 0x01);}else{//不是上电时序gpio_set_value(GPIO_S1, data & 0x01);gpio_set_value(GPIO_S2, (data >> 1) & 0x01);gpio_set_value(GPIO_S3, (data >> 2) & 0x01);gpio_set_value(GPIO_S4, (data >> 3) & 0x01);}}// 上电函数
static void power_on_sequence(void)
{gpio_set_value(GPIO_VL, 1);msleep(TPO_MS);gpio_set_value(GPIO_VPK, 1);gpio_set_value(GPIO_VPC, 1);// 参考书上最小0.5us//udelay(TW_US);udelay(TW_US);gpio_set_value(GPIO_CE, 1);// 6. 等待tn时间(5us),参考书上最小5usudelay(TN_US);gpio_set_value(GPIO_CK, 1);//1111->0x0Fset_pinD_value(0x0F, 0);gpio_set_value(GPIO_SH, 1); //1111111->0x7Fset_pinA_value(0x7F, 0);//1111->0x0Fset_pinS_value(0x0F, 0);printk(KERN_INFO "Full power sequence completed\n");
}
//下电函数
static void power_off_sequence(void)
{//下电顺序S->A->SH->D->CH->5us->CE->0.5/1us->VPC->VPK->1ms->VLset_pinS_value(0x00, 0);set_pinA_value(0x00, 0);gpio_set_value(GPIO_SH, 0);set_pinD_value(0x00, 0);gpio_set_value(GPIO_CK, 0);udelay(TN_US);gpio_set_value(GPIO_CE, 0);udelay(TW_US);gpio_set_value(GPIO_VPK, 0);gpio_set_value(GPIO_VPC, 0);msleep(TPO_MS);gpio_set_value(GPIO_VL, 0);}
void SetPinDValue(u8 data)
{(data & 0x01) == 1 ? set_hig(5):set_low(5);((data >> 1) & 0x01) == 1 ? set_hig(6):set_low(6);((data >> 2) & 0x01) == 1 ? set_hig(7):set_low(7);((data >> 3) & 0x01) == 1 ? set_hig(8):set_low(8);}// 打印时序
static void print_sequence(void)
{//上电顺序//CE->CK->D1-D4->SH->A1-A7->S1-S4//选择第一个喷头(A1-A7)set_pinA_value(0x07, 1);gpio_set_value(GPIO_CK, 0);ndelay(50);gpio_set_value(GPIO_CE, 1);ndelay(50);gpio_set_value(GPIO_CK, 1);ndelay(10);set_pinD_value(0x0F, 1);ndelay(40);}static int ck_thread_func(void *data)
{while (!kthread_should_stop()) {//ck信号测试//set_ck_one_cycle();}printk(KERN_INFO "Power CK thread is stopping...\n");return 0;
}MODULE_LICENSE("GPL");
MODULE_AUTHOR("limingzhao");
MODULE_DESCRIPTION("inkjet enable pro");
//上电时序信号
EXPORT_SYMBOL(power_on_sequence);
//下电时序信号
EXPORT_SYMBOL(power_off_sequence);
//设置引脚
EXPORT_SYMBOL(set_pinA_value);
EXPORT_SYMBOL(set_pinD_value);
EXPORT_SYMBOL(set_pinS_value);
//测试程序pin_s_test
EXPORT_SYMBOL(pin_s_test);
EXPORT_SYMBOL(pin_s_test1);
EXPORT_SYMBOL(pin_s_test2);2.2 直接操作硬件寄存器
这是官方给的示例代码,功能是点亮板子上的一个led灯:
#include <linux/init.h>
#include <linux/module.h>
#include <linux/cdev.h>
#include <linux/fs.h>
#include <linux/uaccess.h>
#include <linux/io.h>#define DEV_NAME "led_chrdev"
#define DEV_CNT (1)#define GPIO0_BASE (0xfdd60000)
//每组GPIO,有2个寄存器,对应32个引脚,每个寄存器负责16个引脚;
//一个寄存器32位,其中高16位都是使能位,低16位对应16个引脚,每个引脚占用1比特位
#define GPIO0_DR_L (GPIO0_BASE + 0x0000)
#define GPIO0_DR_H (GPIO0_BASE + 0x0004)
#define GPIO0_DDR_L (GPIO0_BASE + 0x0008)
#define GPIO0_DDR_H (GPIO0_BASE + 0x000C)static dev_t devno;
struct class *led_chrdev_class;struct led_chrdev {struct cdev dev;unsigned int __iomem *va_dr; // 数据寄存器,设置输出的电压unsigned int __iomem *va_ddr; // 数据方向寄存器,设置输入或者输出unsigned int led_pin; // 偏移
};static int led_chrdev_open(struct inode *inode, struct file *filp)
{ unsigned int val = 0;struct led_chrdev *led_cdev = (struct led_chrdev *)container_of(inode->i_cdev, struct led_chrdev,dev);filp->private_data = container_of(inode->i_cdev, struct led_chrdev, dev);printk("open\n");//设置输出模式val = ioread32(led_cdev->va_ddr);val |= ((unsigned int)0x1 << (led_cdev->led_pin+16));val |= ((unsigned int)0X1 << (led_cdev->led_pin));iowrite32(val,led_cdev->va_ddr);//输出高电平val = ioread32(led_cdev->va_dr);val |= ((unsigned int)0x1 << (led_cdev->led_pin+16));val |= ((unsigned int)0x1 << (led_cdev->led_pin));iowrite32(val, led_cdev->va_dr);return 0;
}static int led_chrdev_release(struct inode *inode, struct file *filp)
{return 0;
}static ssize_t led_chrdev_write(struct file *filp, const char __user * buf,size_t count, loff_t * ppos)
{unsigned long val = 0;char ret = 0;struct led_chrdev *led_cdev = (struct led_chrdev *)filp->private_data;printk("write \n");get_user(ret, buf);val = ioread32(led_cdev->va_dr);printk("val = %lx\n", val);if (ret == '0'){val |= ((unsigned int)0x1 << (led_cdev->led_pin+16));val &= ~((unsigned int)0x01 << (led_cdev->led_pin)); /*设置GPIO引脚输出低电平*/}else{val |= ((unsigned int)0x1 << (led_cdev->led_pin+16));val |= ((unsigned int)0x01 << (led_cdev->led_pin)); /*设置GPIO引脚输出高电平*/}iowrite32(val, led_cdev->va_dr);printk("val = %lx\n", val);return count;
}static struct file_operations led_chrdev_fops = {.owner = THIS_MODULE,.open = led_chrdev_open,.release = led_chrdev_release,.write = led_chrdev_write,
};static struct led_chrdev led_cdev[DEV_CNT] = {{.led_pin = 7}, //偏移,高16引脚,GPIO0_C7
};static __init int led_chrdev_init(void)
{int i = 0;dev_t cur_dev;printk("led_chrdev init (lubancat2 GPIO0_C7)\n");led_cdev[0].va_dr = ioremap(GPIO0_DR_H, 4); //led_cdev[0].va_ddr = ioremap(GPIO0_DDR_H, 4); // alloc_chrdev_region(&devno, 0, DEV_CNT, DEV_NAME);led_chrdev_class = class_create(THIS_MODULE, "led_chrdev");for (; i < DEV_CNT; i++) {cdev_init(&led_cdev[i].dev, &led_chrdev_fops);led_cdev[i].dev.owner = THIS_MODULE;cur_dev = MKDEV(MAJOR(devno), MINOR(devno) + i);cdev_add(&led_cdev[i].dev, cur_dev, 1);device_create(led_chrdev_class, NULL, cur_dev, NULL,DEV_NAME "%d", i);}return 0;
}module_init(led_chrdev_init);static __exit void led_chrdev_exit(void)
{int i;dev_t cur_dev;printk("led chrdev exit (lubancat2 GPIO0_C7)\n");for (i = 0; i < DEV_CNT; i++) {iounmap(led_cdev[i].va_dr); // 释放模式寄存器虚拟地址iounmap(led_cdev[i].va_ddr); // 释放输出类型寄存器虚拟地址}for (i = 0; i < DEV_CNT; i++) {cur_dev = MKDEV(MAJOR(devno), MINOR(devno) + i);device_destroy(led_chrdev_class, cur_dev);cdev_del(&led_cdev[i].dev);}unregister_chrdev_region(devno, DEV_CNT);class_destroy(led_chrdev_class);}module_exit(led_chrdev_exit);MODULE_AUTHOR("embedfire");
MODULE_LICENSE("GPL");具体源代码位置:led_cdev.c
这种方式操作GPIO,直接拉高在拉低操作延时在160ns左右。
这里如果兄弟们想封装自己的GPIO接口,可以通过官方文档去查找:引脚说明
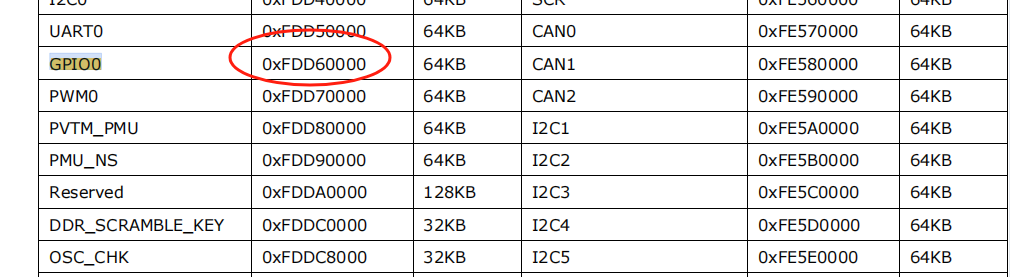
简单来说就是将寄存器分为了高位寄存器和低位寄存器,其中A、B两组为地位寄存器,C和D为高位寄存器,查看Rockchip_RK3568_TRM_Part1_V1.3-20220930P.PDF可以知道GPIO0的基地址为:
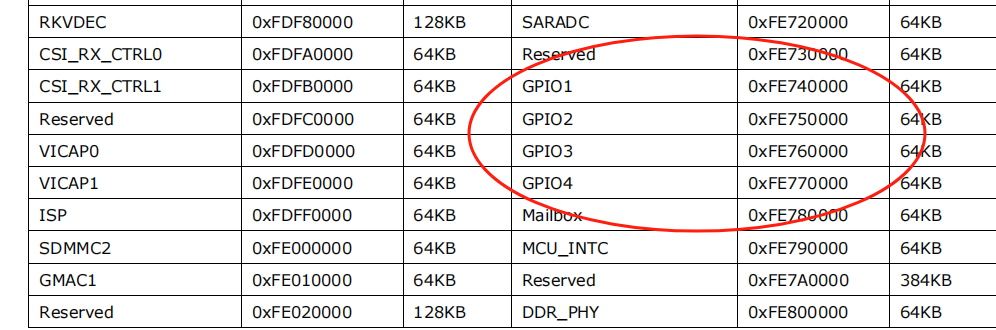
GPIO1、GPIO2、GPIO3、GPIO4的基地址为:
所以可以知道上述代码中地址宏定义:
//GPIO0
#define GPIO0_BASE (0xfdd60000)
//AB用这俩
#define GPIO0_DR_L (GPIO0_BASE + 0x0000)
#define GPIO0_DDR_L (GPIO0_BASE + 0x0008)
//CD用这俩
#define GPIO0_DR_H (GPIO0_BASE + 0x0004)
#define GPIO0_DDR_H (GPIO0_BASE + 0x000C)
的出处,明显可以看到这是使用的GPIO0,至于引脚设置,可以看这里:
具体出处及来源,看这里5.4.2.1. 定义GPIO寄存器物理地址
总结
本文主要分享了GPIO控制的四种方式,shell两种控制方式,和使用代码控制的两种方式,重点要说的是如果你追求极致性能和对硬件有较高的控制要求,ioread32/iowrite32 可能更合适。反之,若追求易用性和代码的可维护性,gpio_set_value 更为推荐。