AStar低代码平台-脚本调用C#方法
修改报工表表单,右键定义弹出菜单,新增一个菜单项,并在点击事件脚本中编写调用脚本。
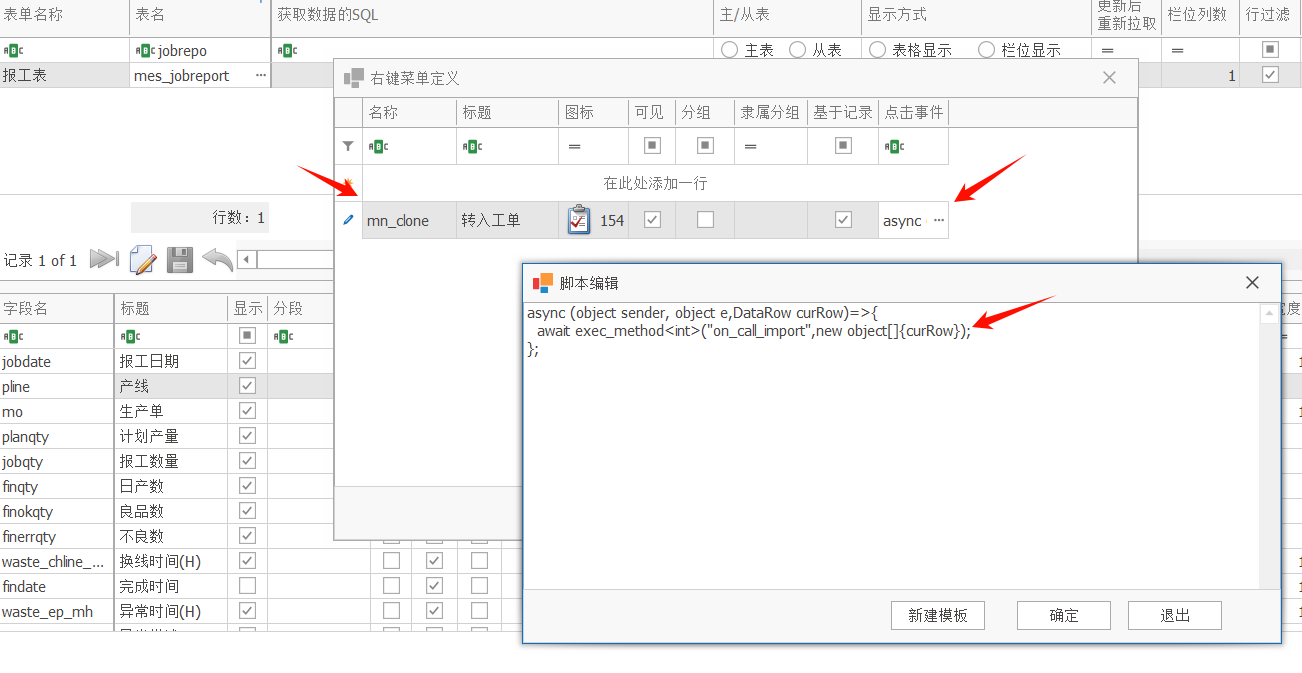
编译脚本,然后在模块代码里面定义这个方法:
public async Task<int> on_call_import(DataRow curRow)
{PrintDataRow(curRow);return 0;
}
``
`修改报工表表单,右键定义弹出菜单,新增一个菜单项,并在点击事件脚本中编写调用脚本。
编译脚本,然后在模块代码里面定义这个方法:
public async Task<int> on_call_import(DataRow curRow)
{PrintDataRow(curRow);return 0;
}
``
`