docker镜像操作
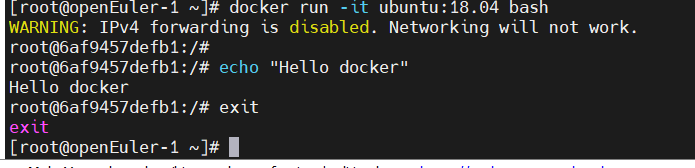
1.我们先拉个ubuntu的镜像

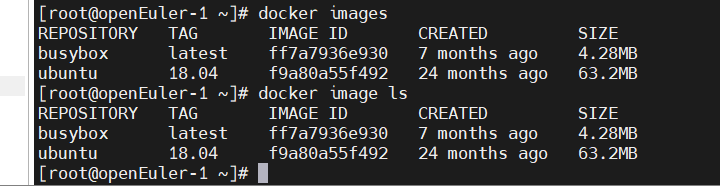
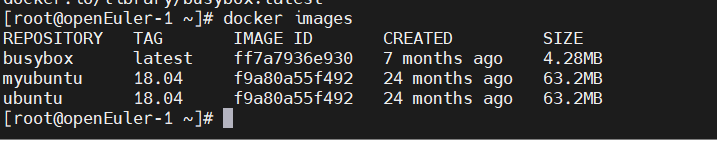
2.查看镜像信息
这俩个是一样的意思
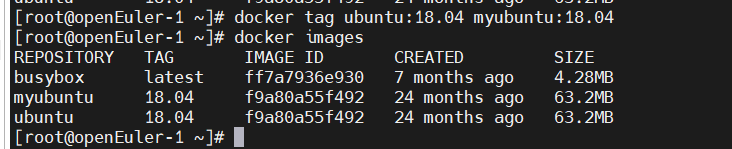
打个tag相当于改了个名字
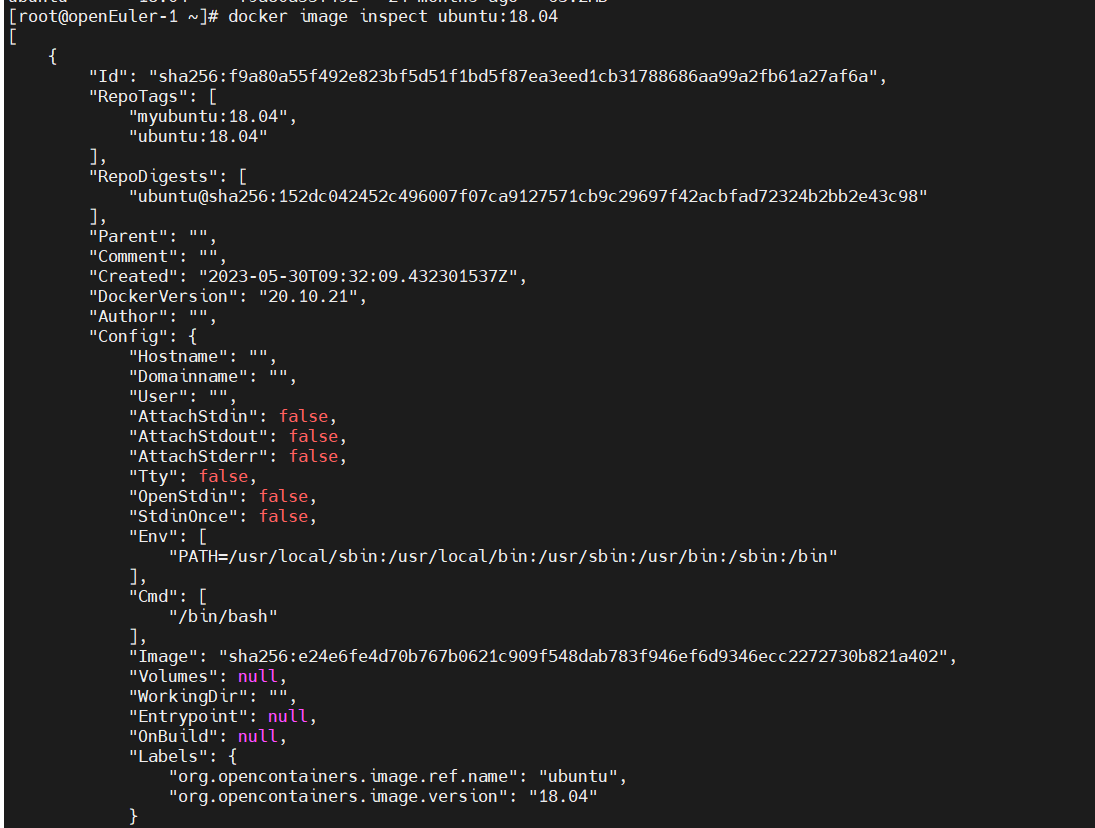
使用inspect命令查看详细信息
使用history命令查看镜像历史

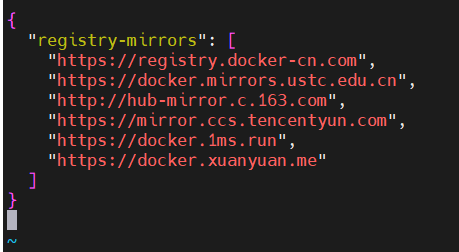
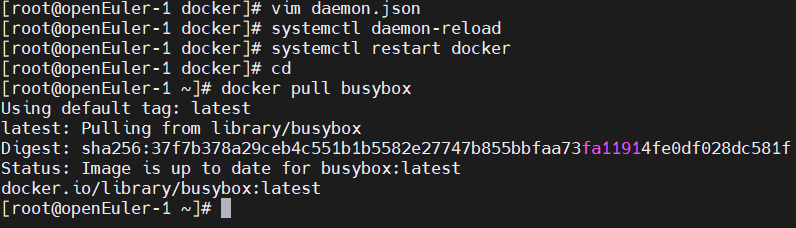
3.搜寻镜像
首先需要国内镜像加速
![]()
![]()


![]()


删除所有容器


我们进到里面去了

然后我现在这个容器就处于运行状态

我们这个版本是可以删的,按理来说正常版本运行状态是删不了的

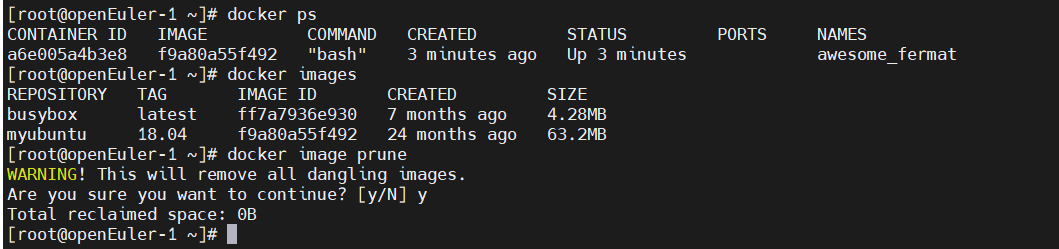
4.清理镜像
docker image prune命令来进行清理
-a,-all:删除所有无用镜像,不光是临时镜像
-filter filter:只清理符合给定过滤器的镜像
-f, -force:强制删除镜像,而不进行提示确认
5.存出和载入镜像
save命令和load(命令)
我们正在运行这个容器
![]()
我们再复制一下终端,然后输入,发现报错,因为我们正在运行这个镜像,所以删除不了

这样就能直接删了

save

然后如果我6.12这台机器想用了,那需要拷过去
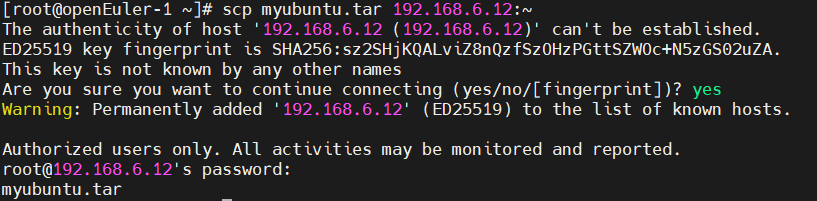
然后我们打开6.12的机子
![]()
加载
