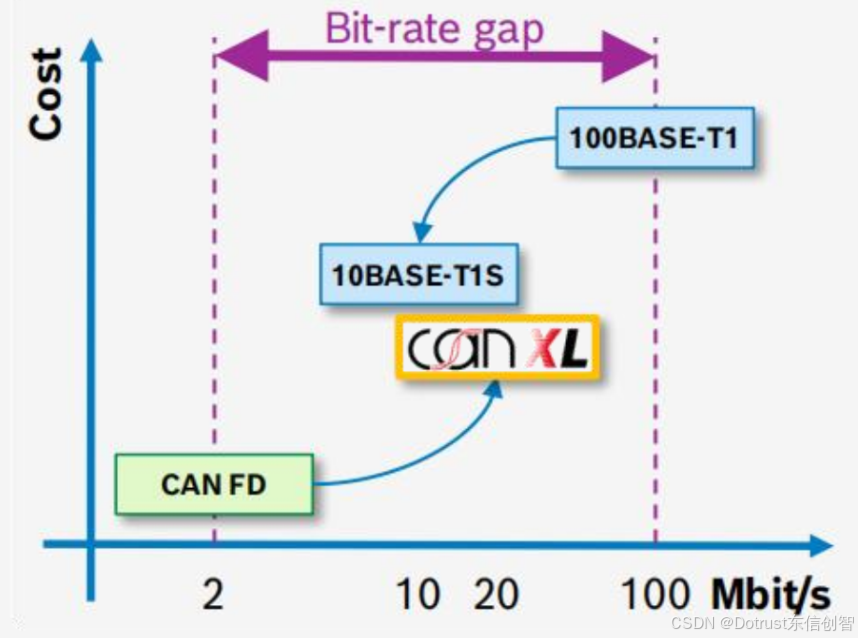
CAN XL如何填平车载网络的“带宽鸿沟”?
CAN XL(Controller Area Network eXtended Length)作为第三代CAN通信技术,展现了显著的优势和广阔的应用前景。它不仅填补了CAN FD与以太网之间的空白,成为车载网络通信的重要补充,也是为应对日益增长的汽车通信需求而提出的新一代车载网络标准。
- CAN技术的演变
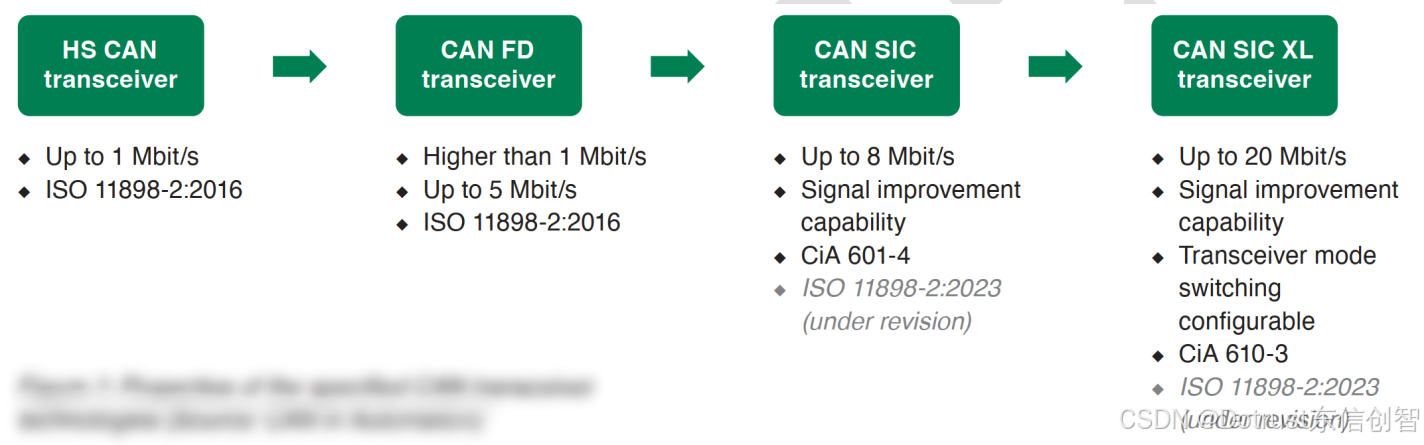
CAN技术经历了经典CAN、CAN FD,到如今的CAN XL三代发展,持续推动着汽车通信网络的升级。现今汽车CAN网络中广泛使用了多种收发器技术(物理层),且技术不断迭代演进。新一代CAN XL兼容前代技术,使网络可实现平滑升级,并能够根据需求灵活配置错误信令与收发器模式,如快速Tx/Rx模式、SIC(Signal Improvement Capability - 信号改善功能)模式。
- 标准化状态
目前,CAN XL的标准化工作正在积极推进中,各大汽车制造商及相关标准组织正努力推动CAN XL技术标准的完善与落地。CAN XL 目前已被标准化并纳入 ISO11898:2024。

- ISO11898:2024
- ISO11898-1-CANCC、CAN FD和CAN XL数据链路层和PCS;
- ISO11898-2-CANHS、FD、SIC和SIC XL PMA子层。CiA系列规范
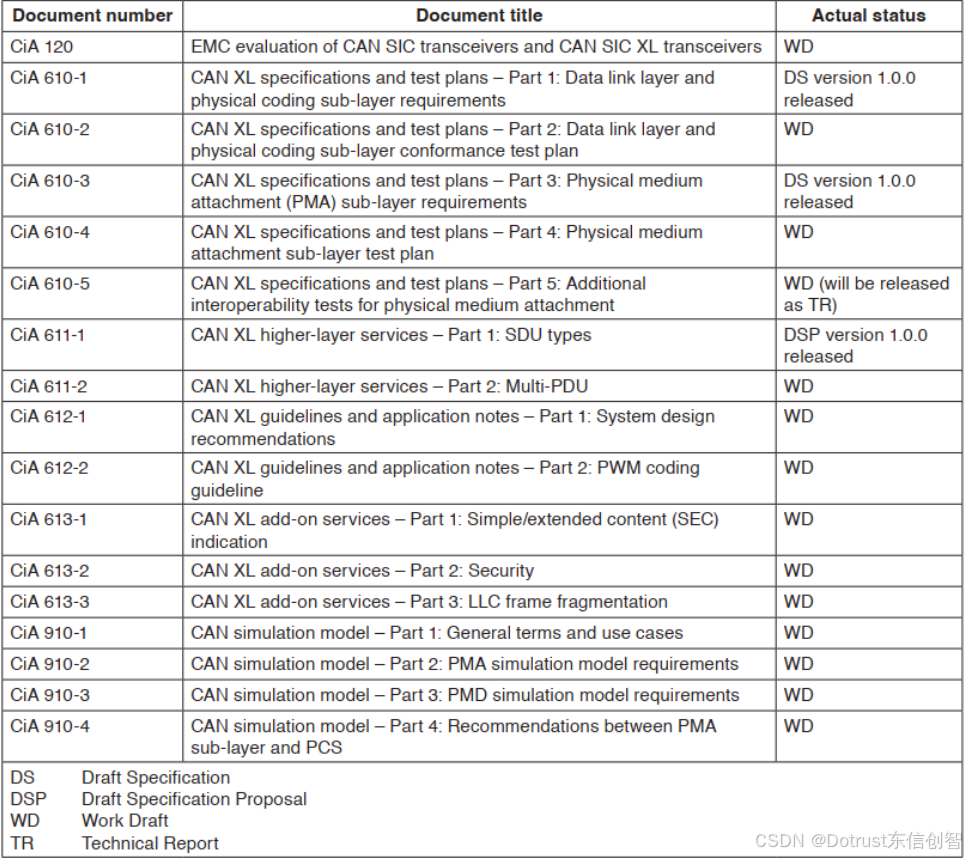
- CiA系列规范
- AUTOSAR标准适配
- AUTOSAR_SWS_CANXLDriver;
- AUTOSAR_SWS_CANXLTransceiverDriver;
- SystemTemplate修改适配,支持以太网透传 (Ethernet Tunneling)。
- 网络安全扩展
- CANsec(安全协议)正在开发中,未来将作为可选功能增强数据链路层安全性。技术特点
技术特点
- 收发器
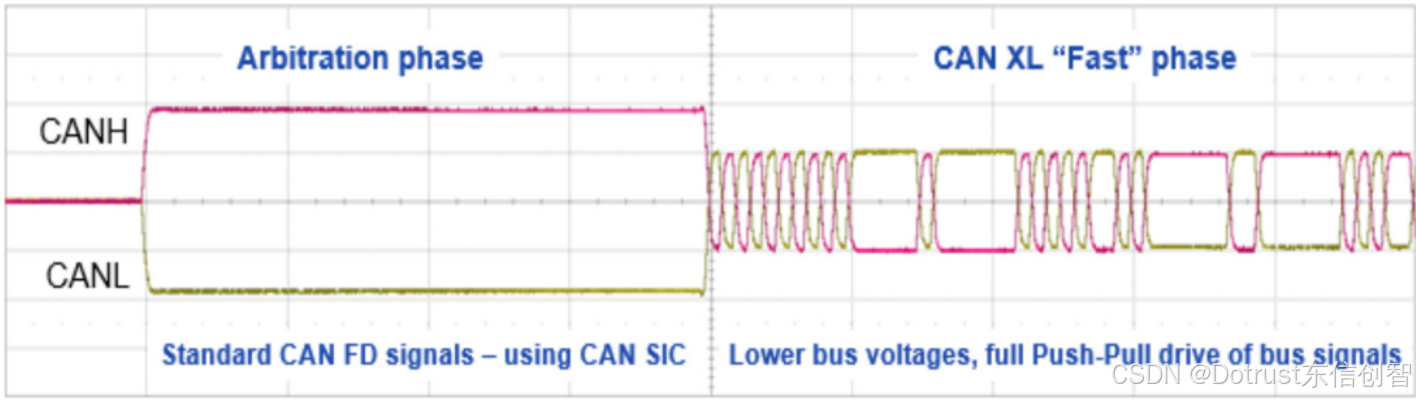
CAN XL的优点是基于数据链路层协议扩展和可在收发器中实现改进物理介质附加子层。CAN XL协议本身扩展了CAN FD,其数据有效载荷高达2048字节。CAN XL还支持在数据阶段过渡到二级物理层方案,称为CAN XL“快速模式”。CAN SIC XL收发器是CAN SIC的扩展,向后兼容CAN FD,并在CAN XL的非快速阶段利用该技术。此外,在“快速模式”期间,它支持二次优化的物理级方案,使CAN SIC XL收发器在快速阶段实现高达20 Mbit/s的数据速率。
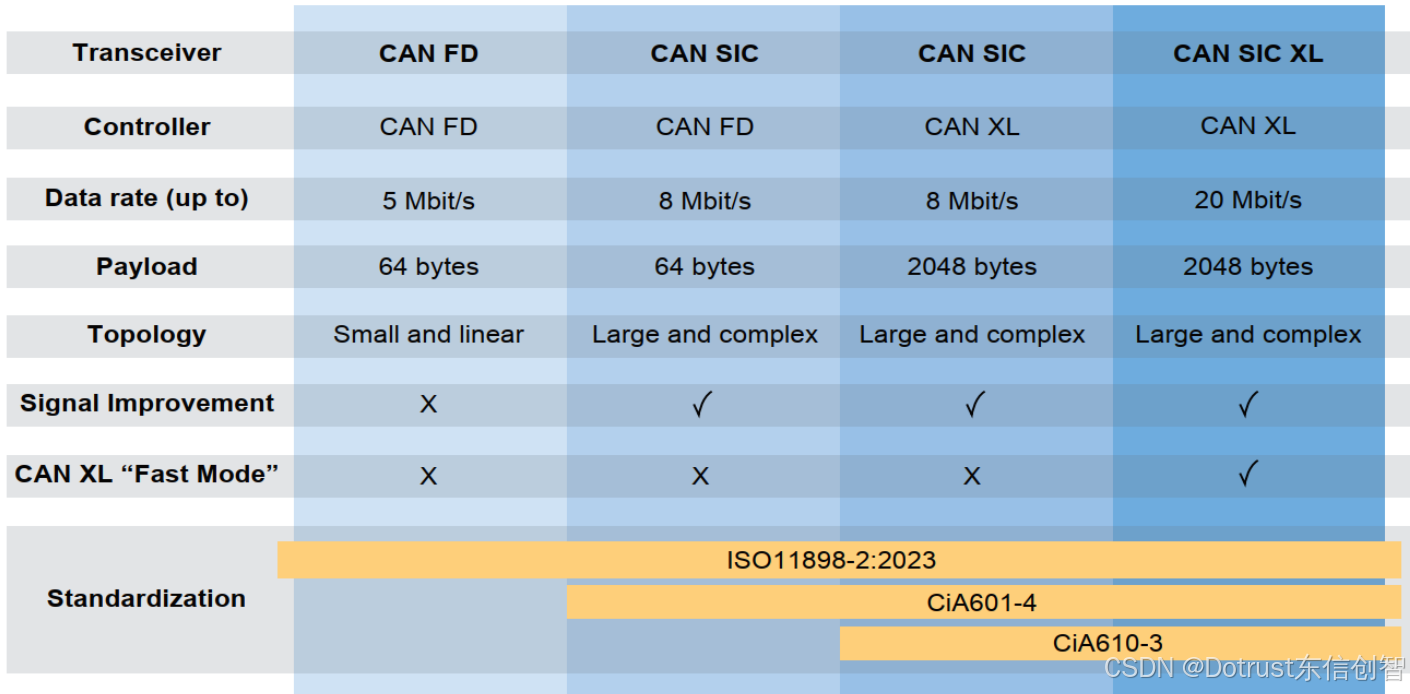
CAN XL向后兼容CAN FD,这意味着控制器和收发器可以混合创建异构网络,并随着时间的推移管理新技术的使用。下图列出了四个用例,并对比了它们的区别。
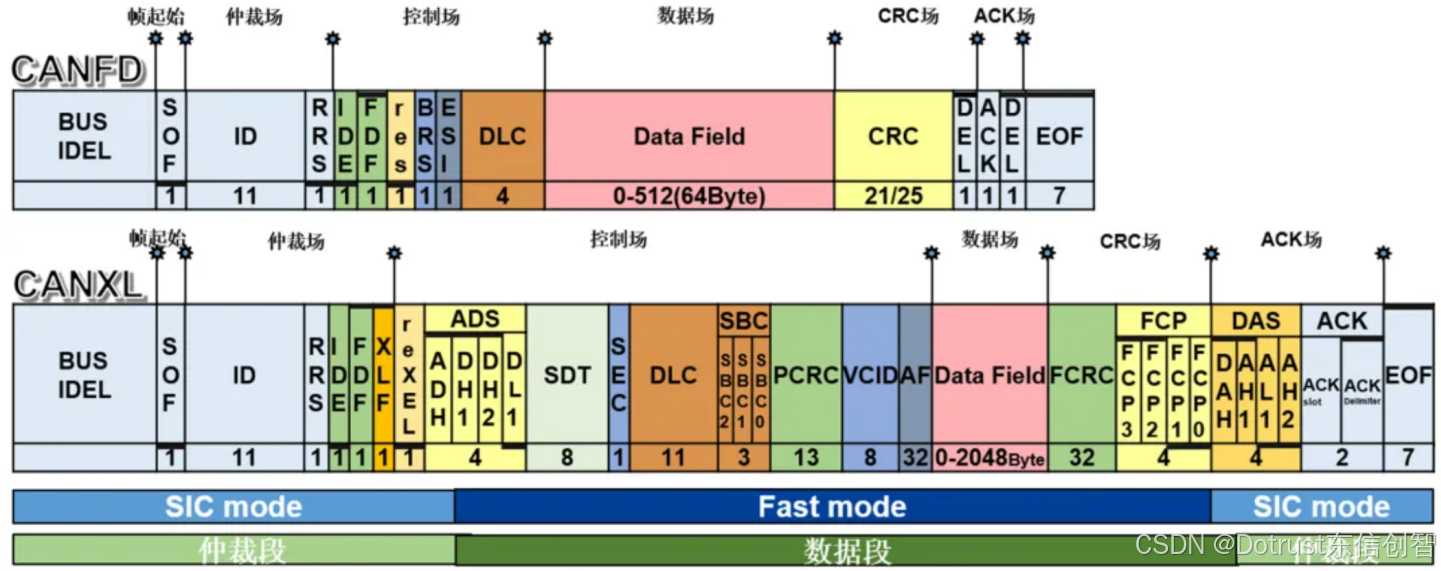
- 帧格式
CAN XL帧由仲裁场、控制场、数据场、CRC场、ACK场和EOF场组成,分为仲裁阶段(低速)和数据阶段(高速)两段。其核心设计目标包括:兼容性(支持经典CAN/CAN FD)、高带宽(20 Mbit/s)、大负载(2048字节)以及协议灵活性。下图是CAN FD与CAN XL帧格式对比图。
- 混合网络(ETH + CAN XL + CAN FD)
CAN XL与以太网的分层融合架构,通过ZONE ECU网关实现高带宽数据传输(20 Mbit/s)、以太网帧隧道化封装(SDT=0x05)及后向兼容传统CAN FD节点,构建智能汽车中兼顾实时性与扩展性的次骨干通信网络。
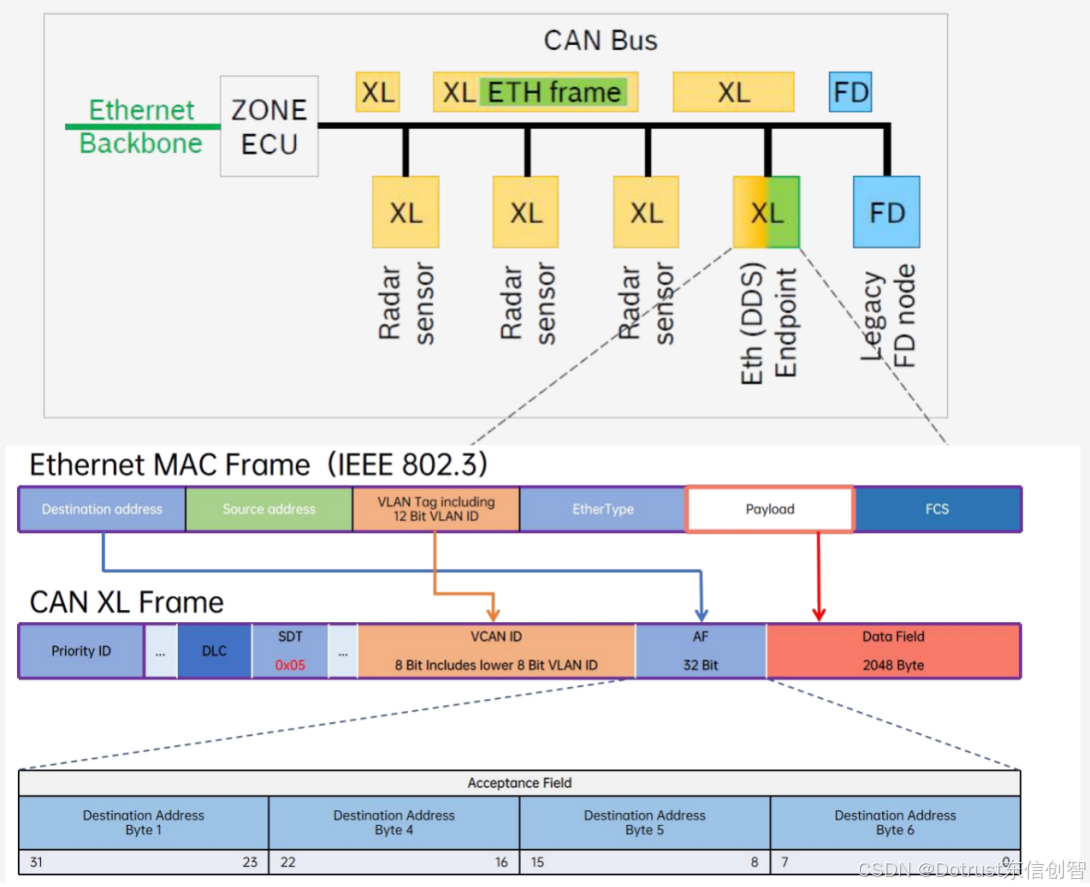
一条总线支持三种协议!
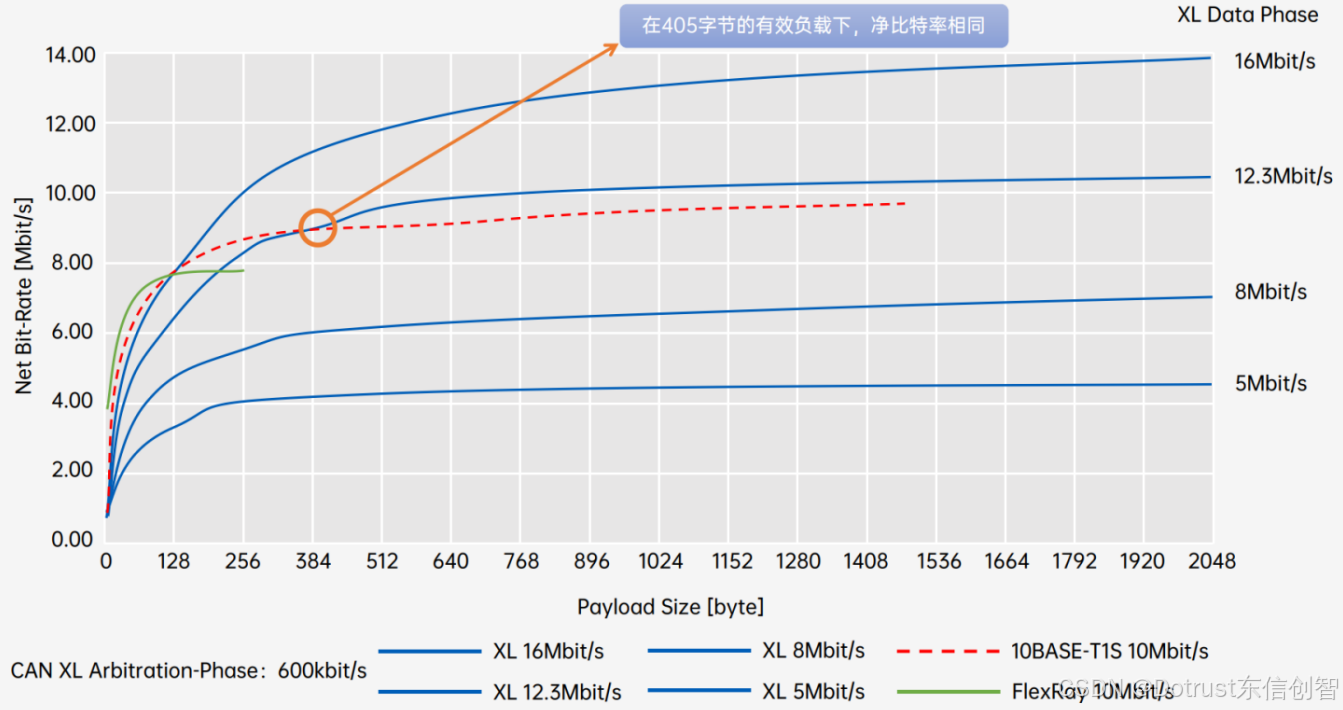
鉴于车载网络系统中约90%的控制器节点传输速率低于10Mbit/s,该带宽已能充分满足主流车载设备的应用需求,涵盖音频传输、雷达信号处理、超声波传感器及底盘控制等关键场景。因此,CAN XL与10BASE-T1S以太网协议在车载通信协议选型中形成直接竞争态势,两者在带宽适配性、实时性及成本效益等维度展开技术博弈。
这两种协议的开发都是为了满足新的电子电气架构要求,并在10Mbit/s的区域提供预期的性能。同时这两种协议都提供相同的数据速率,允许应用传输更长的有效载荷,并在总线上实现接近10Mbit/s的传输速度。然而,它们的介质访问方案不同。下图为不同PayLoad大小对应净比特率的曲线图。
虽然两种技术各有利弊,但预计这两种技术会并存,甚至在一辆车内同时存在,根据其关键竞争力服务于不同应用。下表为两种技术的多维度对比。
| 对比项 | CAN XL | 10Base-T1S |
| 规范成熟度 | 已纳入ISO 11898:2024,部分技术细节待定 | 已通过IEEE 802.3cg-2019标准(2020年发布),技术成熟 |
| 传输速率 | 标称速率10Mbps,实际速率因仲裁阶段(1Mbps或更低)而略低,最高可达20Mbps | 固定10Mbps全速传输,无速率切换 |
| 拓扑兼容性 | 支持复杂拓扑(星型、线型混合),支线长度1-3米,兼容CAN/CAN FD线束 | 总线型拓扑,支线长度≤10cm,需重新设计布线,不支持现有CAN拓扑直接替换 |
| 实时性 | 基于优先级仲裁,延迟确定性强(微秒级) | 依赖PLCA轮询,延迟可控但存在主节点单点故障风险 |
| 错误恢复时间 | 硬件级检测,故障恢复时间≤23μs | 依赖TCP/IP协议栈,恢复时间约几十毫秒 |
| 数据安全性 | 双CRC校验,硬件固化保障数据无丢失 | 依赖上层协议(如TCP)检测数据丢失,需软件实现 |
| 协议栈与生态 | 协议栈简单,需扩展ELP支持高层协议,适合低成本MCU | 无缝集成以太网生态(TSN、SOME/IP),支持统一TCP/IP协议栈 |
| 功耗优化 | 支持CAN报文直接触发休眠唤醒,天然低功耗优势 | 需外部I/O或CAN端口控制休眠唤醒,灵活性较低 |
| 硬件成本 | 控制器集成于MCU,无需交换机,升级成本低 | 受限于25米线长和8节点限制,可能需分网段部署,PHY和线束成本较高 |
| 应用场景 | 实时控制域(底盘、车身控制),成本敏感型市场 | Zonal架构边缘节点(传感器、执行器),需以太网骨干网支持 |
CAN XL优势与应用实例
高吞吐率
- 优势
- CAN XL在数据段支持10-20 Mbit/s的传输速率(理论可达20 Mbit/s);
- 数据负载长度扩展至2048字节。
- 应用实例
- 高分辨率传感器(如激光雷达、摄像头)生成的实时数据需要高速传输,例如雷达点云数据每秒可达数百MB,CAN XL的20Mbit/s速率可满足低延迟传输需求;
- 高清地图更新时,单帧2048字节可直接传输大块地理信息,减少分片重组带来的延迟。
灵活拓扑方案
- 优势
- CAN XL允许将多个CAN FD网络合并为1个CAN XL网络;
- CAN XL允许真正的星形和支线节点拓扑结构,并支持可用的支线长度(相比于10Base-T1S的10厘米支线限制);
- CAN XL便于低、中、高端平台的扩展,可以从线缆星形拓扑中添加或移除支线(相比于汽车以太网中需要交换机来实现);
- 兼容经典CAN、CAN-FD协议,支持与以太网协议(如TCP/IP)的隧道化传输,且同一网络可混合部署不同速率节点。
- 应用实例
- ADAS/雷达系统需要高带宽来不断提高雷达分辨率,由CAN FD组网转变为CAN XL 主网;
- 需要长距离传输,如卡车、拖车的倒车摄像头(最高可达70米)。

- 其他
- 以太网冗余方案
- 更少的成本
- 更快的软件更新
- 更多的可扩展功能
- 更安全……
CAN XL通过高带宽、大负载、强兼容性三大核心特性,填补了CAN FD与以太网之间的速率鸿沟,成为下一代车载及工业网络的关键技术。其应用场景覆盖自动驾驶、智能座舱、工业控制等多个领域,同时依托成熟的标准化生态,具备快速落地的潜力。如果大家想了解更多关于CAN XL的内容,欢迎后台留言或联系邮箱market@dotrustech.com。
注:部分图片来自网络