Don’t Shake the Wheel 论文阅读
主要有三个创新点
-
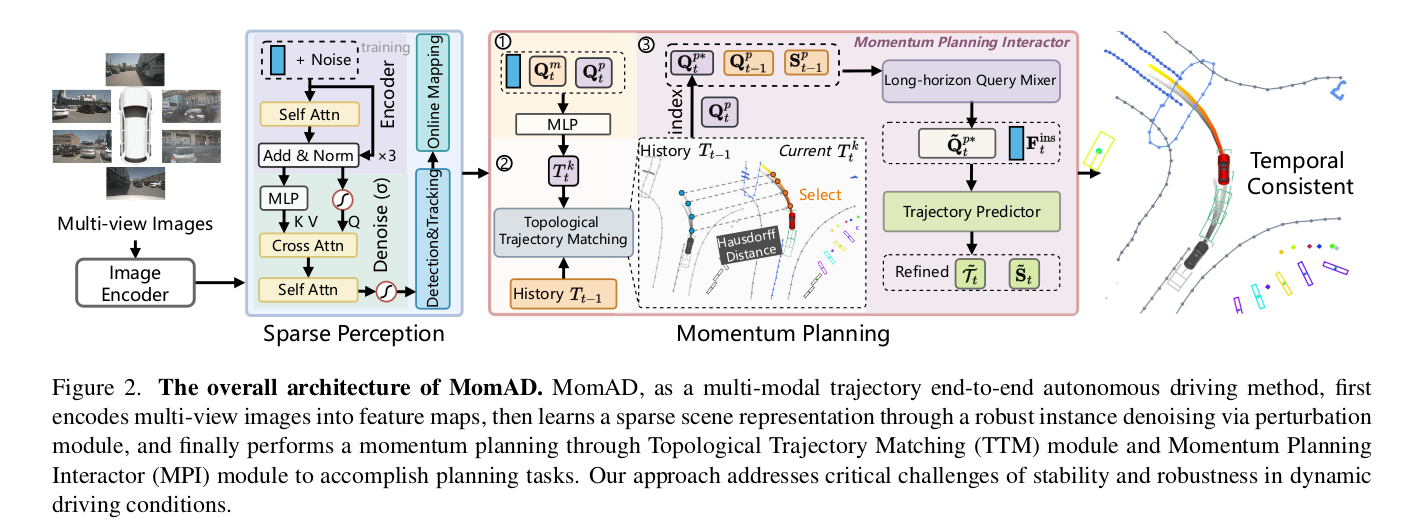
TTM Topologival Trajectory Matching (TTM): 主要任务,匹配距离上一帧距离最近的轨迹
使用Hausdorff distance来计算相似度。
Hausdoff distance的解释:https://zhuanlan.zhihu.com/p/351921396 -
MPI Momentum Planning Interaction: 将前后帧轨迹对应的query进行交互
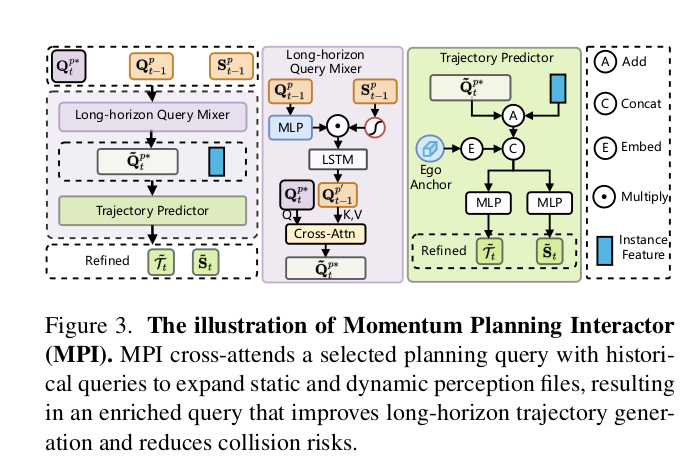
S 是score的意思 -
增加噪声
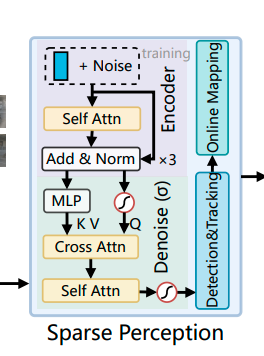
主要也就是给环境信息加了个噪音,然后正常encoder和decoder -
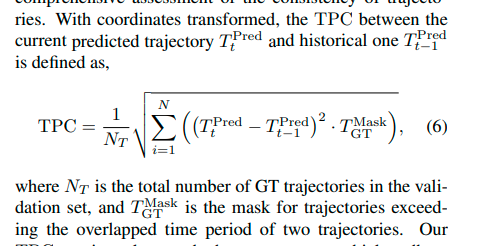
评估指标: Trajectory Prediction Consistency (TPC)