OpenHarmony外设驱动使用 (十),Sensor
OpenHarmony外设驱动使用 (十)
Sensor
概述
功能简介
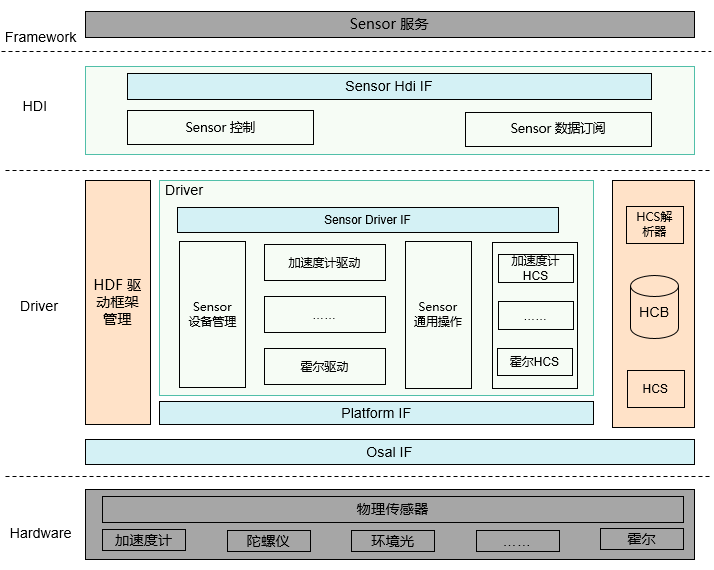
Sensor驱动模型屏蔽硬件器件差异,为上层Sensor服务系统提供稳定的Sensor基础能力接口,包括Sensor列表查询、Sensor启停、Sensor订阅及取消订阅,Sensor参数配置等功能。Sensor设备驱动的开发是基于HDF驱动框架基础上,结合操作系统适配层(OSAL)和平台驱动接口(比如I2C/SPI/UART总线等平台资源)能力,屏蔽不同操作系统和平台总线资源差异,实现Sensor驱动“一次开发,多系统部署”的目标。Sensor驱动模型如图1所示。
图 1 Sensor驱动模型图
基本概念
目前根据sensorId将Sensor分为医学类Sensor、传统类Sensor两种。
-
医学类Sensor:已订阅的sensorId枚举值在128-160范围的为医学类Sensor。
-
传统类Sensor:已订阅的sensorId枚举值不在128-160范围的为传统类Sensor。
运作机制
通过介绍Sensor驱动模型的加载以及运行流程,对模型内部关键组件以及关联组件之间的关系进行了划分,整体加载流程如图2所示:
图 2 Sensor驱动运行图
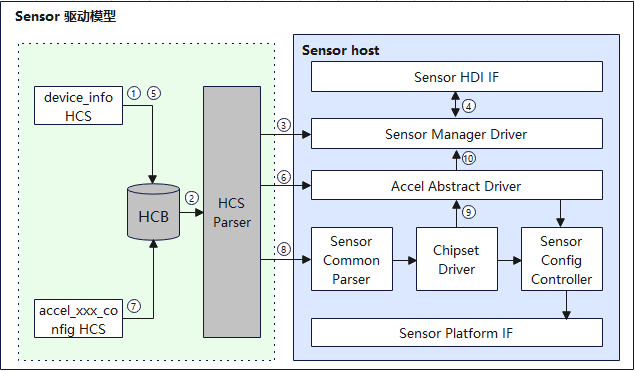
Sensor驱动模型以标准系统RK3568产品中的加速度传感器驱动为例,介绍整个驱动加载及运行流程:
- 从device_info.hcs配置文件中的Sensor Host读取到Sensor设备管理配置信息。
- HDF配置框架从HCB数据库中解析Sensor设备管理配置信息,并关联对应设备驱动。
- 加载并初始化Sensor设备管理驱动。
- Sensor设备管理驱动向HDI发布Sensor基础能力接口。
- 从device_info.hcs配置文件中的Sensor Host读取到加速度传感器驱动配置信息。
- 加载加速度传感器抽象驱动,调用初始化接口,完成Sensor器件的驱动资源分配和数据处理队列的创建。
- 从accel_xxx_config.hcs配置文件中读取到加速度传感器差异化驱动配置和私有化配置信息。
- 加速度传感器芯片差异化驱动,调用通用配置解析接口,完成器件属性信息解析,器件寄存器解析。
- 加速度传感器芯片差异化驱动完成器件的探测,并分配加速度传感器配置资源和加速度传感器差异化接口注册。
- 加速度传感器成功探测到器件之后,加速度传感器芯片差异化驱动通知加速度传感器抽象驱动,注册加速度传感器设备到Sensor设备管理中。
开发指导
场景介绍
- 通过重力和陀螺仪传感器数据,能感知设备倾斜和旋转量,提高用户在游戏场景中的体验。
- 通过接近光传感器数据,感知距离遮挡物的距离,使设备能够自动亮灭屏,达到防误触目的。例如,手机通话时,如屏幕距离人脸过近,则自动关闭屏幕,防止误触的同时降低功耗。
- 通过气压计传感器数据,可以准确的判断设备当前所处的海拔。
- 通过环境光传感器数据,设备能够实现背光自动调节。
- 通过霍尔传感器数据,设备可以实现皮套功能,皮套合上,手机上开一个小窗口,可降低功耗。
接口说明
Sensor驱动模型对外开放的API接口能力如下:
- 提供Sensor HDI(Hardware Device Interface)能力接口,简化服务开发。
- 提供Sensor驱动模型能力接口:
- 依赖HDF驱动框架实现Sensor器件驱动的加载、器件探测、注册和去注册等能力。
- 提供同一类型Sensor器件驱动归一接口、寄存器配置解析操作接口、总线访问抽象接口和平台抽象接口。
- 提供开发者实现的能力接口:依赖HDF驱动框架的HCS(HDF Configuration Source)配置管理,根据同类型Sensor差异化配置,实现Sensor器件参数序列化配置和器件部分操作接口,简化Sensor器件驱动开发。
Sensor驱动模型对外开放的API接口能力的具体实现请参考:
表 1 Sensor驱动模型对外API接口功能介绍
注:以下接口列举的为C接口,接口声明见文件/drivers/peripheral/sensor/interfaces/include。
| 接口名 | 功能描述 |
|---|---|
| int32_t GetAllSensors(struct SensorInformation **sensorInfo, int32_t *count) | 获取系统中注册的所有传感器信息,一组完整传感器信息包括传感器名字、设备厂商、固件版本号、硬件版本号、传感器类型编号、传感器标识、最大量程、精度、功耗。 |
| int32_t Enable(int32_t sensorId) | 使能指定传感器设备,只有数据订阅者使能传感器后,才能获取订阅的传感器数据。 |
| int32_t Disable(int32_t sensorId) | 去使能指定传感器设备。 |
| int32_t SetBatch(int32_t sensorId, int64_t samplingInterval, int64_t reportInterval) | 设置指定传感器的数据采样间隔和数据上报间隔。 |
| int32_t SetMode(int32_t sensorId, int32_t mode) | 设置指定传感器的工作模式,不同的工作模式,上报数据方式不同。 |
| int32_t SetOption(int32_t sensorId, uint32_t option) | 设置指定传感器量程,精度等可选配置。 |
| int32_t Register(int32_t groupId, RecordDataCallback cb) | 订阅者根据不同groupId注册传感器数据回调函数,系统会将获取到的传感器数据上报给订阅者。 |
| int32_t Unregister(int32_t groupId, RecordDataCallback cb) | 订阅者根据groupId和回调函数注销对应订阅者的传感器数据回调函数。 |
Sensor驱动模型对驱动开发者开放的功能接口,驱动开发者无需实现,直接使用,请参考:
表2 Sensor驱动模型对驱动开发者开放的功能接口列表
| 接口名 | 功能描述 |
|---|---|
| int32_t AddSensorDevice(const struct SensorDeviceInfo *deviceInfo) | 添加当前类型的传感器设备到传感器设备管理。 |
| int32_t DeleteSensorDevice(const struct SensorBasicInfo *sensorBaseInfo) | 删除传感器设备管理里指定的传感器设备。 |
| int32_t ReportSensorEvent(const struct SensorReportEvent *events) | 上报指定类型传感器的数据到用户侧。 |
| int32_t ReadSensor(struct SensorBusCfg *busCfg, uint16_t regAddr, uint8_t *data, uint16_t dataLen) | 按照配置的总线方式,读取传感器寄存器配置数据。 |
| int32_t WriteSensor(struct SensorBusCfg *busCfg, uint8_t *writeData, uint16_t len) | 按照配置的总线方式,将传感器配置数据写入寄存器。 |
| int32_t SetSensorRegCfgArray(struct SensorBusCfg *busCfg, const struct SensorRegCfgGroupNode *group); | 根据传感器总线类型信息,下发寄存器分组配置。 |
| int32_t GetSensorBaseConfigData(const struct DeviceResourceNode *node, struct SensorCfgData *config) | 根据传感器设备HCS资源配置,获取传感器信息,总线配置信息,属性配置等基本配置信息,并初始化对应的基本配置数据结构体。 |
| int32_t ParseSensorRegConfig(struct SensorCfgData *config) | 根据传感器设备HCS资源配置,解析寄存器分组信息,并初始化配置数据结构体。 |
| void ReleaseSensorAllRegConfig(struct SensorCfgData *config) | 释放传感器配置数据结构体里分配的资源。 |
| int32_t GetSensorBusHandle(struct SensorBusCfg *busCfg) | 获取传感器总线句柄信息。 |
| int32_t ReleaseSensorBusHandle(struct SensorBusCfg *busCfg) | 释放传感器句柄信息。 |
Sensor驱动模型要求驱动开发者实现的接口功能,请参考:
表 3 Sensor驱动模型要求驱动开发者实现的接口列表
| 接口名 | 功能描述 |
|---|---|
| int32_t init(void) | 传感器设备探测成功后,需要对传感器设备初始化配置。 |
| int32_t Enable(void) | 根据当前传感器设备的HCS配置,下发传感器设备使能操作组的寄存器配置。 |
| int32_t Disable(void) | 根据当前传感器设备的HCS配置,下发传感器设备去使能操作组的寄存器配置。 |
| int32_t SetBatch(int64_t samplingInterval, int64_t reportInterval) | 根据数据采样率和数据上报间隔,配置当前传感器设备的数据上报线程处理时间。 |
| int32_t SetMode(int32_t mode) | 配置当前传感器设备数据上报方式。 |
| int32_t SetOption(uint32_t option) | 根据可选配置、下发量程和精度等寄存器配置。 |
| void ReadSensorData(void) | 读取传感器数据。 |
接口实现参考开发步骤章节。
开发步骤
基于HDF驱动框架,按照驱动Driver Entry程序,以加速度传感器驱动为例,介绍传感器驱动的开发。传感器的驱动开发包括抽象驱动开发和差异化驱动开发两部分。传感器的抽象驱动开发包括同一个传感器id中不同器件的公共接口实现;传感器的差异化驱动开发包括不同器件差异化接口的实现。
-
开发加速度传感器抽象驱动。
-
加速度传感器抽象驱动在Sensor Host中的配置信息,代码实现路径如下:vendor\hihope\rk3568\hdf_config\khdf\device_info\device_info.hcs。
具体代码实现如下:
/* 加速度计传感器设备HCS配置 */ device_sensor_accel :: device {device0 :: deviceNode {policy = 1; // 驱动服务发布的策略priority = 110; // 驱动启动优先级(0-200),值越大优先级越低,建议配置为100,优先级相同则不保证device的加载顺序preload = 0; // 驱动按需加载字段,0表示加载,2表示不加载permission = 0664; // 驱动创建设备节点权限moduleName = "HDF_SENSOR_ACCEL"; // 驱动名称,该字段的值必须和驱动入口结构的moduleName值一致serviceName = "sensor_accel"; // 驱动对外发布服务的名称,必须唯一deviceMatchAttr = "hdf_sensor_accel_driver"; // 驱动私有数据匹配的关键字,必须和驱动私有数据配置表中的match_attr值相等} } -
加速度传感器抽象驱动代码实现路径为:drivers\hdf_core\framework\model\sensor\driver\accel\sensor_accel_driver.c。
-
加速度传感器抽象驱动对应的HdfDriverEntry对象,其中,Driver Entry入口函数定义如下:
struct HdfDriverEntry g_sensorAccelDevEntry = {.moduleVersion = 1, // 加速度计传感器模块版本号.moduleName = "HDF_SENSOR_ACCEL", // 加速度计传感器模块名,要与device_info.hcs文件里的加速度计moduleName字段值一样.Bind = BindAccelDriver, // 加速度计传感器绑定函数.Init = InitAccelDriver, // 加速度计传感器初始化函数.Release = ReleaseAccelDriver, // 加速度计传感器资源释放函数 };/* 调用HDF_INIT将驱动入口注册到HDF框架中。在加载驱动时HDF框架会先调用Bind函数,再调用Init函数加载该驱动。当Init调用异常时,HDF框架会调用Release释放驱动资源并退出 */ HDF_INIT(g_sensorAccelDevEntry); -
加速度传感器抽象驱动Bind接口实现如下:
int32_t AccelBindDriver(struct HdfDeviceObject *device) {CHECK_NULL_PTR_RETURN_VALUE(device, HDF_ERR_INVALID_PARAM);struct AccelDrvData *drvData = (struct AccelDrvData *)OsalMemCalloc(sizeof(*drvData));if (drvData == NULL) {HDF_LOGE("%s: Malloc accel drv data fail!", __func__);return HDF_ERR_MALLOC_FAIL;}drvData->ioService.Dispatch = DispatchAccel;drvData->device = device;device->service = &drvData->ioService;g_accelDrvData = drvData;return HDF_SUCCESS; } -
加速度传感器抽象驱动Init接口实现如下:
int32_t AccelInitDriver(struct HdfDeviceObject *device) {CHECK_NULL_PTR_RETURN_VALUE(device, HDF_ERR_INVALID_PARAM);struct AccelDrvData *drvData = (struct AccelDrvData *)device->service;CHECK_NULL_PTR_RETURN_VALUE(drvData, HDF_ERR_INVALID_PARAM);/* 工作队列资源初始化 */if (InitAccelData(drvData) != HDF_SUCCESS) {HDF_LOGE("%s: Init accel config failed", __func__);return HDF_FAILURE;}/* 分配加速度配置信息资源 */drvData->accelCfg = (struct SensorCfgData *)OsalMemCalloc(sizeof(*drvData->accelCfg));if (drvData->accelCfg == NULL) {HDF_LOGE("%s: Malloc accel config data failed", __func__);return HDF_FAILURE;}/* 注册寄存器分组信息 */drvData->accelCfg->regCfgGroup = &g_regCfgGroup[0];drvData->cb = NULL;HDF_LOGI("%s: Init accel driver success", __func__);return HDF_SUCCESS; } -
加速度抽象传感器驱动Release接口在驱动卸载或者Init执行失败时,会调用此接口释放资源,具体实现如下:
void AccelReleaseDriver(struct HdfDeviceObject *device) {CHECK_NULL_PTR_RETURN(device);struct AccelDrvData *drvData = (struct AccelDrvData *)device->service;CHECK_NULL_PTR_RETURN(drvData);/* 器件在位,释放已分配资源 */if (drvData->detectFlag && drvData->accelCfg != NULL) {AccelReleaseCfgData(drvData->accelCfg);}OsalMemFree(drvData->accelCfg);drvData->accelCfg = NULL;/* 器件在位,销毁工作队列资源 */HdfWorkDestroy(&drvData->accelWork);HdfWorkQueueDestroy(&drvData->accelWorkQueue);OsalMemFree(drvData); } -
加速度传感器抽象驱动内部接口代码实现如下:
-
提供给差异化驱动的初始化接口,完成加速度传感器器件的基本配置信息解析(加速度传感器信息,加速度传感器总线配置,加速度传感器器件探测寄存器配置),器件探测,器件寄存器解析,具体实现如下:
static int32_t InitAccelAfterDetected(struct SensorCfgData *config) {struct SensorDeviceInfo deviceInfo;CHECK_NULL_PTR_RETURN_VALUE(config, HDF_ERR_INVALID_PARAM);/* 初始化加速度计接口函数 */if (InitAccelOps(config, &deviceInfo) != HDF_SUCCESS) {HDF_LOGE("%s: Init accel ops failed", __func__);return HDF_FAILURE;}/* 注册加速度计器件到传感器设备管理模块 */if (AddSensorDevice(&deviceInfo) != HDF_SUCCESS) {HDF_LOGE("%s: Add accel device failed", __func__);return HDF_FAILURE;}/* 器件寄存器解析 */if (ParseSensorDirection(config) != HDF_SUCCESS) {HDF_LOGE("%s: Parse accel direction failed", __func__);(void)DeleteSensorDevice(&config->sensorInfo);return HDF_FAILURE;}if (ParseSensorRegConfig(config) != HDF_SUCCESS) {HDF_LOGE("%s: Parse sensor register failed", __func__);(void)DeleteSensorDevice(&config->sensorInfo);ReleaseSensorAllRegConfig(config);ReleaseSensorDirectionConfig(config);return HDF_FAILURE;}return HDF_SUCCESS; }struct SensorCfgData *AccelCreateCfgData(const struct DeviceResourceNode *node) {struct AccelDrvData *drvData = AccelGetDrvData();/* 如果器件不在位,返回进行下个器件探测 */if (drvData == NULL || node == NULL) {HDF_LOGE("%s: Accel node pointer NULL", __func__);return NULL;}if (drvData->detectFlag) {HDF_LOGE("%s: Accel sensor have detected", __func__);return NULL;}if (drvData->accelCfg == NULL) {HDF_LOGE("%s: Accel accelCfg pointer NULL", __func__);return NULL;}/* 设备基本配置信息解析 */if (GetSensorBaseConfigData(node, drvData->accelCfg) != HDF_SUCCESS) {HDF_LOGE("%s: Get sensor base config failed", __func__);goto BASE_CONFIG_EXIT;}/* 如果器件不在位(存在器件ID的情况),返回进行下个器件探测 */if (DetectSensorDevice(drvData->accelCfg) != HDF_SUCCESS) {HDF_LOGI("%s: Accel sensor detect device no exist", __func__);drvData->detectFlag = false;goto BASE_CONFIG_EXIT;}/* 器件寄存器解析 */drvData->detectFlag = true;if (InitAccelAfterDetected(drvData->accelCfg) != HDF_SUCCESS) {HDF_LOGE("%s: Accel sensor detect device no exist", __func__);goto INIT_EXIT;}return drvData->accelCfg;INIT_EXIT:(void)ReleaseSensorBusHandle(&drvData->accelCfg->busCfg); BASE_CONFIG_EXIT:drvData->accelCfg->root = NULL;(void)memset_s(&drvData->accelCfg->sensorInfo, sizeof(struct SensorBasicInfo), 0, sizeof(struct SensorBasicInfo));(void)memset_s(&drvData->accelCfg->busCfg, sizeof(struct SensorBusCfg), 0, sizeof(struct SensorBusCfg));(void)memset_s(&drvData->accelCfg->sensorAttr, sizeof(struct SensorAttr), 0, sizeof(struct SensorAttr));return drvData->accelCfg; } -
Enable接口的代码实现如下:
static int32_t SetAccelEnable(void) {int32_t ret;struct AccelDrvData *drvData = AccelGetDrvData();CHECK_NULL_PTR_RETURN_VALUE(drvData, HDF_ERR_INVALID_PARAM);CHECK_NULL_PTR_RETURN_VALUE(drvData->accelCfg, HDF_ERR_INVALID_PARAM);if (drvData->enable) {HDF_LOGE("%s: Accel sensor is enabled", __func__);return HDF_SUCCESS;}/* 设置寄存器 */ret = SetSensorRegCfgArray(&drvData->accelCfg->busCfg, drvData->accelCfg->regCfgGroup[SENSOR_ENABLE_GROUP]);if (ret != HDF_SUCCESS) {HDF_LOGE("%s: Accel sensor enable config failed", __func__);return ret;}/* 创建定时器 */ret = OsalTimerCreate(&drvData->accelTimer, SENSOR_TIMER_MIN_TIME, AccelTimerEntry, (uintptr_t)drvData);if (ret != HDF_SUCCESS) {HDF_LOGE("%s: Accel create timer failed[%d]", __func__, ret);return ret;}/* 开启定时器进行数据上报 */ret = OsalTimerStartLoop(&drvData->accelTimer);if (ret != HDF_SUCCESS) {HDF_LOGE("%s: Accel start timer failed[%d]", __func__, ret);return ret;}drvData->enable = true;return HDF_SUCCESS; } -
Disable接口的代码实现如下:
static int32_t SetAccelDisable(void) {int32_t ret;struct AccelDrvData *drvData = AccelGetDrvData();CHECK_NULL_PTR_RETURN_VALUE(drvData, HDF_ERR_INVALID_PARAM);CHECK_NULL_PTR_RETURN_VALUE(drvData->accelCfg, HDF_ERR_INVALID_PARAM);if (!drvData->enable) {HDF_LOGE("%s: Accel sensor had disable", __func__);return HDF_SUCCESS;}/* 设置寄存器 */ret = SetSensorRegCfgArray(&drvData->accelCfg->busCfg, drvData->accelCfg->regCfgGroup[SENSOR_DISABLE_GROUP]);if (ret != HDF_SUCCESS) {HDF_LOGE("%s: Accel sensor disable config failed", __func__);return ret;}/* 删除定时器 */ret = OsalTimerDelete(&drvData->accelTimer);if (ret != HDF_SUCCESS) {HDF_LOGE("%s: Accel delete timer failed", __func__);return ret;}drvData->enable = false;return HDF_SUCCESS; } -
SetBatch接口的代码实现如下:
static int32_t SetAccelBatch(int64_t samplingInterval, int64_t interval) {(void)interval;struct AccelDrvData *drvData = NULL;drvData = AccelGetDrvData();CHECK_NULL_PTR_RETURN_VALUE(drvData, HDF_ERR_INVALID_PARAM);/* 给定时器设置采样率 */drvData->interval = samplingInterval;return HDF_SUCCESS; } -
SetMode接口的代码实现如下:
static int32_t SetAccelMode(int32_t mode) {if (mode <= SENSOR_WORK_MODE_DEFAULT || mode >= SENSOR_WORK_MODE_MAX) {HDF_LOGE("%s: The current mode is not supported", __func__);return HDF_FAILURE;}return HDF_SUCCESS; } -
SetOption接口的代码实现如下:
static int32_t SetAccelOption(uint32_t option) {(void)option;return HDF_SUCCESS; }
-
-
-
-
开发加速度传感器差异化驱动。
-
加速度传感器差异化驱动在Sensor Host中的配置信息,代码实现路径如下:vendor\hihope\rk3568\hdf_config\khdf\device_info\device_info.hcs。
具体代码实现如下:
device_sensor_mxc6655xa :: device {device0 :: deviceNode {policy = 1; // policy字段是驱动服务发布的策略priority = 120; // 驱动启动优先级(0-200),值越大优先级越低,建议配置为100,优先级相同则不保证device的加载顺序 preload = 0; // 驱动按需加载字段,0表示加载,2表示不加载permission = 0664; // 驱动创建设备节点权限moduleName = "HDF_SENSOR_ACCEL_MXC6655XA"; // 驱动名称,该字段的值必须和驱动入口结构的moduleName值一致serviceName = "hdf_accel_mxc6655xa"; // 加速度mxc6655xa对外发布服务的名称,必须唯一deviceMatchAttr = "hdf_sensor_accel_mxc6655xa_driver"; // 加速度差异化驱动私有数据匹配的关键字,必须和驱动私有数据配置表中的match_attr值相等} } -
加速度传感器差异化驱动私有HCS配置:
-
代码实现路径:vendor\hihope\rk3568\hdf_config\khdf\sensor\accel\mxc6655xa_config.hcs。
-
具体代码实现如下:
#include "../sensor_common.hcs" root {accel_mxc6655xa_chip_config : sensorConfig {match_attr = "hdf_sensor_accel_mxc6655xa_driver";sensorInfo :: sensorDeviceInfo {sensorName = "accelerometer";vendorName = "memsi_mxc6655xa"; // max string length is 16 bytessensorTypeId = 1; // enum SensorTypeTagsensorId = 1; // user define sensor idpower = 230;minDelay = 5000000; // nanosecondmaxDelay = 200000000; // nanosecond}sensorBusConfig :: sensorBusInfo {busType = 0; // 0:i2c 1:spibusNum = 5;busAddr = 0x15;regWidth = 1; // 1byte}sensorIdAttr :: sensorIdInfo {chipName = "mxc6655xa";chipIdRegister = 0x0f;chipIdValue = 0x05; // 根据器件ID寄存器,读取的值,或查看相关芯片datasheet手册确认该值}sensorDirection {direction = 1; // chip direction range of value:0-7/* <sign> 1:negative 0:positive<map> 0:AXIS_X 1:AXIS_Y 2:AXIS_Z*//* sign[AXIS_X], sign[AXIS_Y], sign[AXIS_Z], map[AXIS_X], map[AXIS_Y], map[AXIS_Z] */convert = [0, 0, 0, 0, 1, 2,1, 0, 0, 1, 0, 2,0, 0, 1, 0, 1, 2,0, 1, 0, 1, 0, 2,1, 0, 1, 0, 1, 2,0, 0, 1, 1, 0, 2,0, 1, 1, 0, 1, 2,1, 1, 1, 1, 0, 2];}sensorRegConfig {/* regAddr: register addressvalue: config register valuelen: size of valuemask: mask of valuedelay: config register delay time (ms)opsType: enum SensorOpsType 0-none 1-read 2-write 3-read_check 4-update_bitcalType: enum SensorBitCalType 0-none 1-set 2-revert 3-xor 4-left shift 5-right shiftshiftNum: shift bitsdebug: 0-no debug 1-debugsave: 0-no save 1-save*//* regAddr, value, mask, len, delay, opsType, calType, shiftNum, debug, save */initSeqConfig = [0x7e, 0xb6, 0xff, 1, 5, 2, 0, 0, 0, 0,0x7e, 0x10, 0xff, 1, 5, 2, 0, 0, 0, 0];enableSeqConfig = [0x7e, 0x11, 0xff, 1, 5, 2, 0, 0, 0, 0,0x41, 0x03, 0xff, 1, 0, 2, 0, 0, 0, 0,0x40, 0x08, 0xff, 1, 0, 2, 0, 0, 0, 0];disableSeqConfig = [0x7e, 0x10, 0xff, 1, 5, 2, 0, 0, 0, 0];}} }
-
-
加速度差异化驱动的代码实现路径:drivers\peripheral\sensor\chipset\accel\accel_mxc6655xa.c
-
加速度传感器差异化驱动对应的HdfDriverEntry对象,其中,Driver Entry入口函数定义如下:
/* 注册加速度mxc6655xa传感器入口数据结构体对象 */ struct HdfDriverEntry g_accelMxc6655xaDevEntry = {.moduleVersion = 1, // 加速度mxc6655xa传感器模块版本号.moduleName = "HDF_SENSOR_ACCEL_MXC6655XA", // 加速度mxc6655xa传感器模块名,要与device_info.hcs文件里加速度mxc6655xa传感器moduleName字段值一致.Bind = Mxc6655xaBindDriver, // 加速度mxc6655xa传感器的绑定函数.Init = Mxc6655xaInitDriver, // 加速度mxc6655xa传感器的初始化函数.Release = Mxc6655xaReleaseDriver, // 加速度mxc6655xa传感器资源释放函数 }; /* 调用HDF_INIT将驱动入口注册到HDF框架中,在加载驱动时HDF框架会先调用Bind函数,再调用Init函数加载该驱动,当Init调用异常时,HDF框架会调用Release释放驱动资源并退出 */ HDF_INIT(g_accelMxc6655xaDevEntry); -
加速度传感器差异化驱动Bind接口实现如下:
int32_t Mxc6655xaBindDriver(struct HdfDeviceObject *device) {CHECK_NULL_PTR_RETURN_VALUE(device, HDF_ERR_INVALID_PARAM);struct Mxc6655xaDrvData *drvData = (struct Mxc6655xaDrvData *)OsalMemCalloc(sizeof(*drvData));if (drvData == NULL) {HDF_LOGE("%s: Malloc MXC6655XA drv data fail", __func__);return HDF_ERR_MALLOC_FAIL;}drvData->ioService.Dispatch = DispatchMXC6655xa;drvData->device = device;device->service = &drvData->ioService;g_mxc6655xaDrvData = drvData;return HDF_SUCCESS; } -
加速度传感器差异化驱动Init接口实现如下:
int32_t Mxc6655xaInitDriver(struct HdfDeviceObject *device) {int32_t ret;struct AccelOpsCall ops;CHECK_NULL_PTR_RETURN_VALUE(device, HDF_ERR_INVALID_PARAM);struct Mxc6655xaDrvData *drvData = (struct Mxc6655xaDrvData *)device->service;CHECK_NULL_PTR_RETURN_VALUE(drvData, HDF_ERR_INVALID_PARAM);drvData->sensorCfg = AccelCreateCfgData(device->property);if (drvData->sensorCfg == NULL || drvData->sensorCfg->root == NULL) {HDF_LOGD("%s: Creating accelcfg failed because detection failed", __func__);return HDF_ERR_NOT_SUPPORT;}ops.Init = NULL;ops.ReadData = ReadMxc6655xaData;ret = AccelRegisterChipOps(&ops);if (ret != HDF_SUCCESS) {HDF_LOGE("%s: Register MXC6655XA accel failed", __func__);return HDF_FAILURE;}ret = InitMxc6655xa(drvData->sensorCfg);if (ret != HDF_SUCCESS) {HDF_LOGE("%s: Init MXC6655XA accel failed", __func__);return HDF_FAILURE;}return HDF_SUCCESS; } -
加速度传感器差异化驱动Release接口实现如下:
void Mxc6655xaReleaseDriver(struct HdfDeviceObject *device) {CHECK_NULL_PTR_RETURN(device);struct Mxc6655xaDrvData *drvData = (struct Mxc6655xaDrvData *)device->service;CHECK_NULL_PTR_RETURN(drvData);if (drvData->sensorCfg != NULL) {AccelReleaseCfgData(drvData->sensorCfg);drvData->sensorCfg = NULL;}OsalMemFree(drvData); } -
加速度传感器差异化驱动内部接口实现。
需要开发者实现的ReadMxc6655xaData接口函数,在 Mxc6655xaInitDriver函数里面注册此函数,具体实现如下:
static int32_t ReadMxc6655xaRawData(struct SensorCfgData *data, struct AccelData *rawData, uint64_t *timestamp) {uint8_t status = 0;uint8_t reg[ACCEL_AXIS_BUTT];OsalTimespec time;int32_t x;int32_t y;int32_t z;(void)memset_s(&time, sizeof(time), 0, sizeof(time));(void)memset_s(reg, sizeof(reg), 0, sizeof(reg));CHECK_NULL_PTR_RETURN_VALUE(data, HDF_ERR_INVALID_PARAM);if (OsalGetTime(&time) != HDF_SUCCESS) {HDF_LOGE("%s: Get time failed", __func__);return HDF_FAILURE;}*timestamp = time.sec * SENSOR_SECOND_CONVERT_NANOSECOND + time.usec * SENSOR_CONVERT_UNIT; /* unit nanosecond */int32_t ret = ReadSensor(&data->busCfg, MXC6655XA_STATUS_ADDR, &status, sizeof(uint8_t));if (ret != HDF_SUCCESS) {HDF_LOGE("%s: data status [%u] ret [%d]", __func__, status, ret);return HDF_FAILURE;}ret = ReadSensor(&data->busCfg, MXC6655XA_ACCEL_X_LSB_ADDR, ®[ACCEL_X_AXIS_LSB], sizeof(uint8_t));CHECK_PARSER_RESULT_RETURN_VALUE(ret, "read data");ret = ReadSensor(&data->busCfg, MXC6655XA_ACCEL_X_MSB_ADDR, ®[ACCEL_X_AXIS_MSB], sizeof(uint8_t));CHECK_PARSER_RESULT_RETURN_VALUE(ret, "read data");ret = ReadSensor(&data->busCfg, MXC6655XA_ACCEL_Y_LSB_ADDR, ®[ACCEL_Y_AXIS_LSB], sizeof(uint8_t));CHECK_PARSER_RESULT_RETURN_VALUE(ret, "read data");ret = ReadSensor(&data->busCfg, MXC6655XA_ACCEL_Y_MSB_ADDR, ®[ACCEL_Y_AXIS_MSB], sizeof(uint8_t));CHECK_PARSER_RESULT_RETURN_VALUE(ret, "read data");ret = ReadSensor(&data->busCfg, MXC6655XA_ACCEL_Z_LSB_ADDR, ®[ACCEL_Z_AXIS_LSB], sizeof(uint8_t));CHECK_PARSER_RESULT_RETURN_VALUE(ret, "read data");ret = ReadSensor(&data->busCfg, MXC6655XA_ACCEL_Z_MSB_ADDR, ®[ACCEL_Z_AXIS_MSB], sizeof(uint8_t));CHECK_PARSER_RESULT_RETURN_VALUE(ret, "read data");x = SensorConvertData(reg[ACCEL_X_AXIS_MSB], reg[ACCEL_X_AXIS_LSB]);y = SensorConvertData(reg[ACCEL_Y_AXIS_MSB], reg[ACCEL_Y_AXIS_LSB]);z = SensorConvertData(reg[ACCEL_Z_AXIS_MSB], reg[ACCEL_Z_AXIS_LSB]);rawData->x = x;rawData->y = y;rawData->z = z;return HDF_SUCCESS; } /* 读取加速度的event数据,在 Mxc6655xaInitDriver函数里面注册此函数,将数据传给加速度抽象驱动 */ int32_t ReadMxc6655xaData(struct SensorCfgData *cfg, struct SensorReportEvent *event) {int32_t ret;struct AccelData rawData = { 0, 0, 0 };static int32_t tmp[ACCEL_AXIS_NUM];CHECK_NULL_PTR_RETURN_VALUE(cfg, HDF_ERR_INVALID_PARAM);CHECK_NULL_PTR_RETURN_VALUE(event, HDF_ERR_INVALID_PARAM);ret = ReadMxc6655xaRawData(cfg, &rawData, &event->timestamp);if (ret != HDF_SUCCESS) {HDF_LOGE("%s: MXC6655XA read raw data failed", __func__);return HDF_FAILURE;}event->sensorId = SENSOR_TAG_ACCELEROMETER;event->option = 0;event->mode = SENSOR_WORK_MODE_REALTIME;rawData.x = rawData.x * MXC6655XA_ACC_SENSITIVITY_2G;rawData.y = rawData.y * MXC6655XA_ACC_SENSITIVITY_2G;rawData.z = rawData.z * MXC6655XA_ACC_SENSITIVITY_2G;tmp[ACCEL_X_AXIS] = (rawData.x * SENSOR_CONVERT_UNIT) / SENSOR_CONVERT_UNIT;tmp[ACCEL_Y_AXIS] = (rawData.y * SENSOR_CONVERT_UNIT) / SENSOR_CONVERT_UNIT;tmp[ACCEL_Z_AXIS] = (rawData.z * SENSOR_CONVERT_UNIT) / SENSOR_CONVERT_UNIT;ret = SensorRawDataToRemapData(cfg->direction, tmp, sizeof(tmp) / sizeof(tmp[0]));if (ret != HDF_SUCCESS) {HDF_LOGE("%s: MXC6655XA convert raw data failed", __func__);return HDF_FAILURE;}event->dataLen = sizeof(tmp);event->data = (uint8_t *)&tmp;return ret; }
-
-
调测验证
驱动开发完成后,在传感器单元测试里面开发自测试用例,验证驱动基本功能。测试环境采用开发者自测试平台。
-
参考测试代码如下:
#include <cmath> #include <cstdio> #include <unistd.h> #include <gtest/gtest.h> #include <securec.h> #include "hdf_base.h" #include "osal_mem.h" #include "osal_time.h" #include "sensor_if.h" #include "sensor_type.h"using namespace testing::ext; const struct SensorInterface *g_sensorDev = nullptr; /* 创建回调函数 */ static int32_t SensorDataCallback(const struct SensorEvents *event) {if (event == NULL) {return HDF_FAILURE;}float *data = (float*)event->data;printf("time [%lld] sensor id [%d] x-[%f] y-[%f] z-[%f]\n\r", event->timestamp,event->sensorId, (*data), *(data + 1), *(data + 2));return HDF_SUCCESS; }class HdfSensorTest : public testing::Test { public:static void SetUpTestCase();static void TearDownTestCase();void SetUp();void TearDown(); };/* 用例执行前,初始化传感器接口实例 */ void HdfSensorTest::SetUpTestCase() {g_sensorDev = NewSensorInterfaceInstance();if (g_sensorDev == nullptr) {printf("test sensor get module instance failed\n\r");} } /* 用例资源释放 */ void HdfSensorTest::TearDownTestCase() {if (g_sensorDev != nullptr) {FreeSensorInterfaceInstance();g_sensorDev = nullptr;} }void HdfSensorTest::SetUp() { }void HdfSensorTest::TearDown() { }HWTEST_F(HdfSensorTest,TestAccelDriver_001, TestSize.Level0) {int ret;struct SensorInformation *sensorInfo = NULL;int32_t count = 0;int32_t sensorInterval = 200000000; /* 数据采样率设置200毫秒,单位纳秒 */int32_t reportInterval = 400000000;/* 2.订阅者注册传感器数据回调处理函数 */ret = g_sensorDev->Register(TRADITIONAL_SENSOR_TYPE, SensorDataCallback);if (ret != 0) {return;}printf("Register success\n");/* 3.获取设备支持的Sensor列表 */ret = g_sensorDev->GetAllSensors(&sensorInfo, &count);if (ret != 0) {return;}printf("GetAllSensors count: %d\n", count);for (int i = 0; i < count; i++){printf("sensor [%d]: sensorName: %s, vendorName: %s, sensorTypeId: %d, sensorId: %d\n", i,sensorInfo[i].sensorName, sensorInfo[i].vendorName, sensorInfo[i].sensorTypeId, sensorInfo[i].sensorId);}for (int i = 0; i < count; i++){/* 4.设置传感器采样率 */ret = g_sensorDev->SetBatch(sensorInfo[i].sensorId, sensorInterval, reportInterval);if (ret != 0) {printf("SetBatch failed\n ,ret: %d",ret);continue;}printf("SetBatch success\n");/* 5.使能传感器 */ret = g_sensorDev->Enable(sensorInfo[i].sensorId);if (ret != 0) {continue;}printf("Enable success\n");usleep(1000 * 1000);/* 6.去使能传感器 */ret = g_sensorDev->Disable(sensorInfo[i].sensorId);if (ret != 0) {continue;}printf("Disable success\n");}/* 7.取消传感器数据订阅函数 */ret = g_sensorDev->Unregister(TRADITIONAL_SENSOR_TYPE, SensorDataCallback);if (ret != 0) {return;}printf("Unregister success\n"); } -
编译文件gn参考代码如下:
import("//build/ohos.gni") import("//build/test.gni") import("//drivers/hdf_core/adapter/uhdf2/uhdf.gni")module_output_path = "drivers_peripheral_sensor/sensor" ohos_unittest("sensor_test") {module_out_path = module_output_pathsources = [ "sensor_test.cpp" ]include_dirs = ["//drivers/peripheral/sensor/interfaces/include",]deps = [ "//drivers/peripheral/sensor/hal:hdi_sensor" ]external_deps = ["c_utils:utils","hdf_core:libhdf_utils","hiviewdfx_hilog_native:libhilog",]cflags = ["-Wall","-Wextra","-Werror","-Wno-format","-Wno-format-extra-args",]install_enable = trueinstall_images = [ "vendor" ]module_install_dir = "bin"part_name = "unionman_products" }