最小二乘法拟合平面(线性回归法、梯度下降、PCA法)
参考笔记:
Open3D 最小二乘拟合平面(直接求解法)【2025最新版】_python open3d已知平面方程绘制平面-CSDN博客
目录
1.前言
2.线性回归法
2.1 模型假设
2.2 定义误差函数
2.3 求偏导并解方程
2.4 解方程
2.5 案例演示
2.5.1 手工计算实例
2.5.2 使用Python实现
3.梯度下降法
4.PCA法
5.SVD分解法
1.前言
在阅读本文之前的前置内容是:最小二乘法拟合直线,可以看我写的另一篇博客:
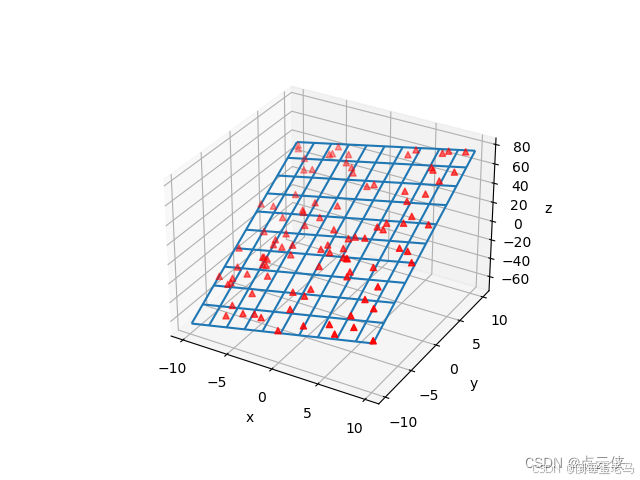
最小二乘法拟合直线,用线性回归法、梯度下降法实现-CSDN博客文章浏览阅读222次,点赞7次,收藏4次。对于每个数据点,预测值为最小化所有数据点的误差平方和:最终目标就是找到使总误差S最小的a、b,这可以通过S分别对a、b求偏导,并令偏导数 = 0来实现梯度下降(Gradient Descent)是一种迭代优化算法,通过不断沿损失函数负梯度方向更新参数,逐步逼近最优解。https://blog.csdn.net/m0_55908255/article/details/148018256?spm=1011.2415.3001.5331在学习了最小二乘法拟合直线之后,我们可以将最小二乘法推广至三维空间,在三维空间中为 n 组三维数据点
拟合出一个平面
,使得所有数据点到平面的 垂直距离平方和 最小。如下图所示:
2.线性回归法
线性回归法也称为直接法,计算简单,可以直接推导出拟合平面方程 的 a、b、c,应用比较广泛
2.1 模型假设
假设我们有 n 组三维数据点 ,我们的目标是找到一个平面
,使得所有数据点到平面的 垂直距离平方和 最小
2.2 定义误差函数
对于每个数据点 ,预测值为
,则误差为:
目标:最小化所有数据点的误差平方和:

最终目标就是找到使总误差 S 最小的 a、b、c,这可以通过 S 分别对 a、b、c 求偏导,并令偏导数 = 0 来实现
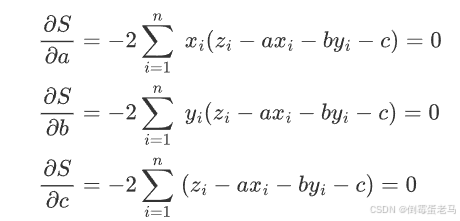
2.3 求偏导并解方程
为了找到使总误差 S 最小的 a、b、c,可以对 a、b、c 分别求偏导,令导数为 0 ,得到方程组如下:
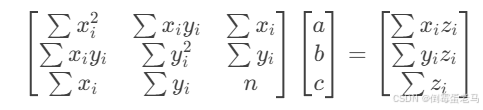
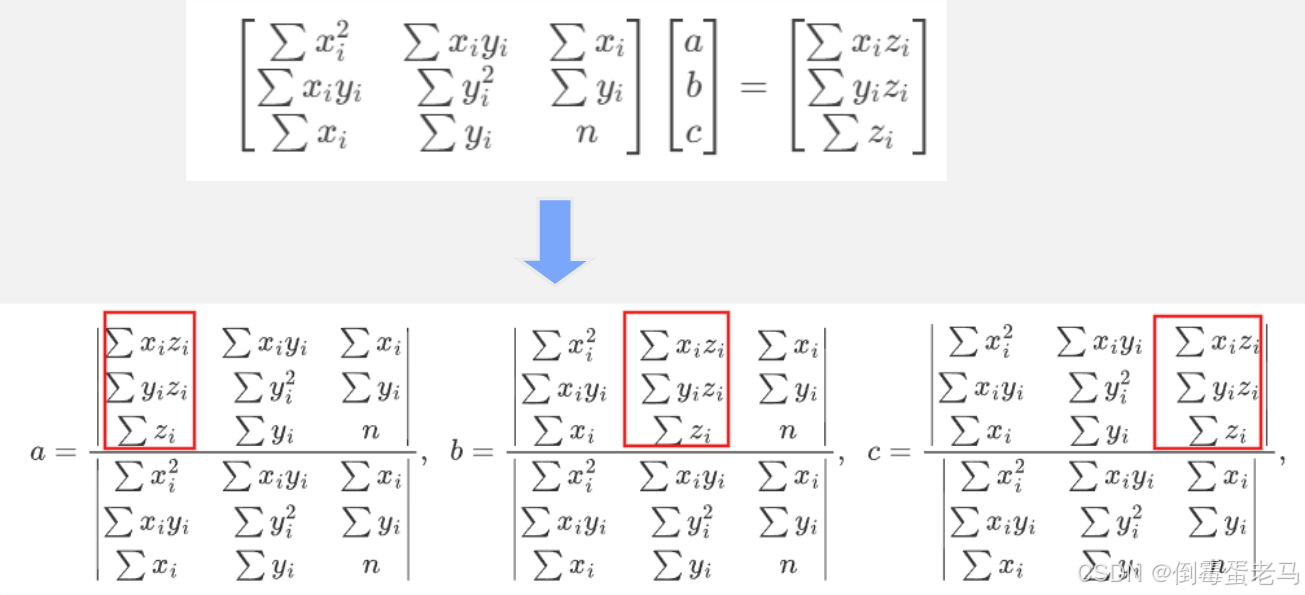
将方程组展开并整理为矩阵形式:
注:
2.4 解方程
① 计算中间项:
全是一些常数,直接进行计算即可
② 构建系数矩阵和常数向量:
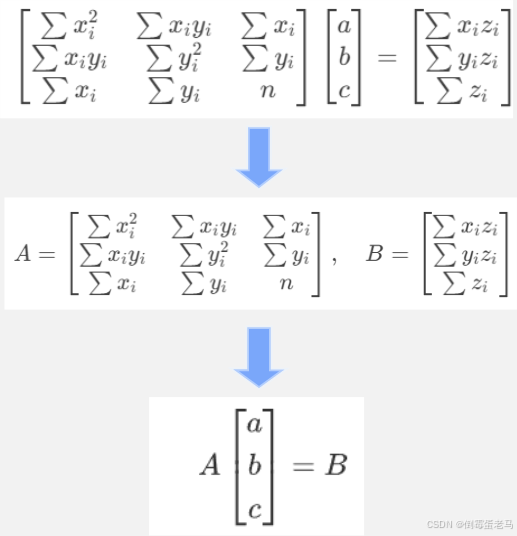
③ 解方程组:
④ 拟合平面:
当然,解方程时也可以使用克拉默法则,这样就不需要求 A 的逆矩阵,如下:
2.5 案例演示
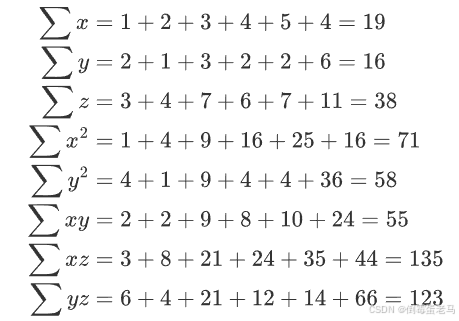
2.5.1 手工计算实例
假设有以下数据点:
计算中间项:
构建方程并代入数值:
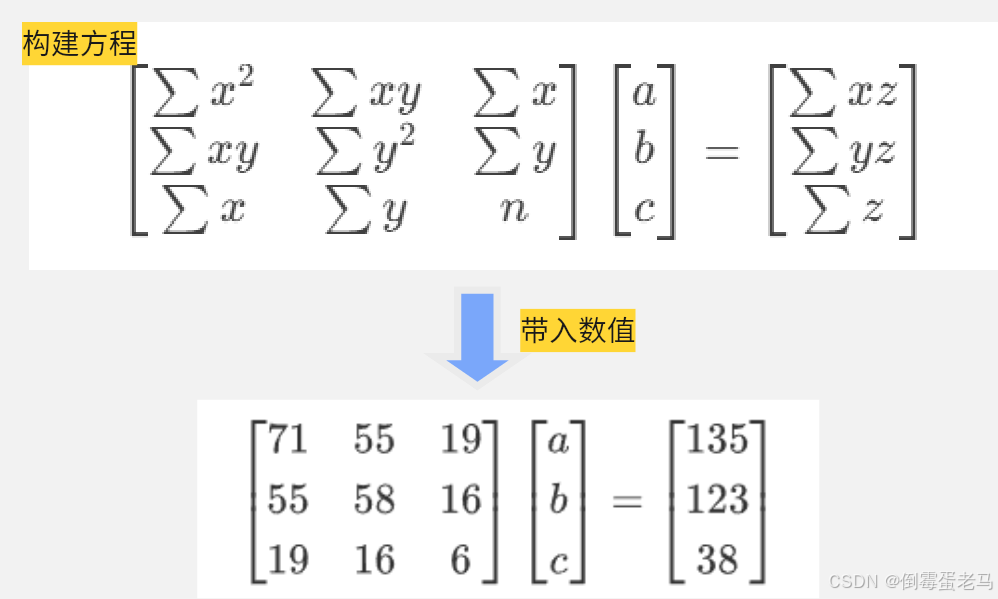
解方程组可得:
最终拟合的平面方程:
🆗,以上就是整个手工计算过程,还是比较简单的,但需要一些《线性代数》的相关基础
2.5.2 使用Python实现
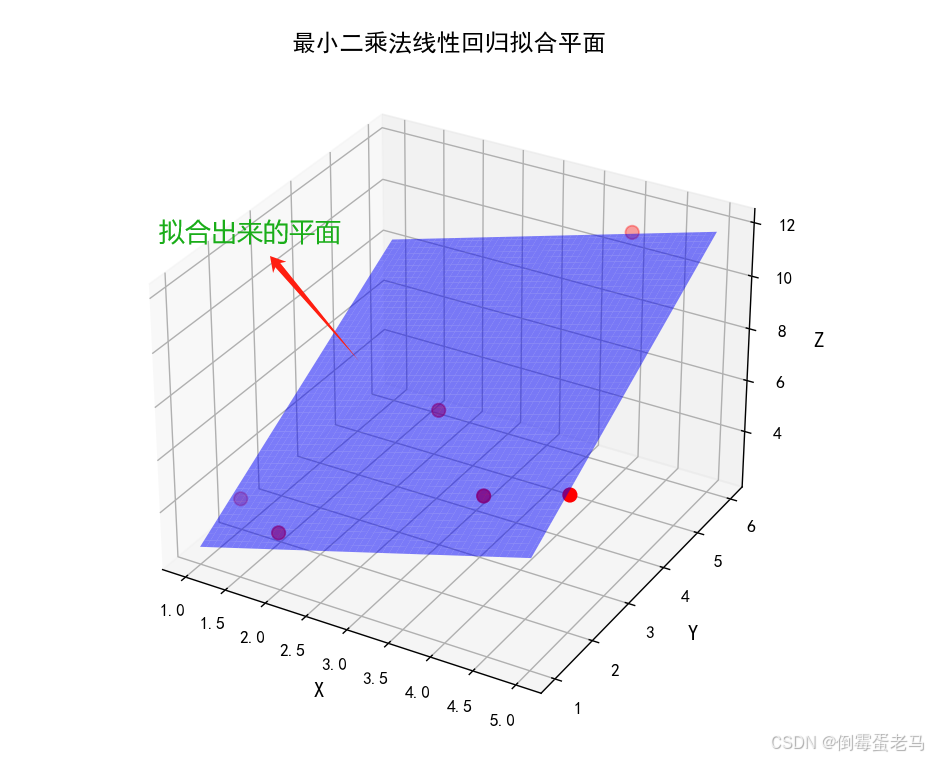
我们将 2.5.1 中的手工计算例子使用 Python 来实现,并作可视化,代码如下:
import numpy as np
import matplotlib.pyplot as plt
plt.rcParams["font.sans-serif"] = ["SimHei"] #设置字体,可以显示中文
plt.rcParams["axes.unicode_minus"] = False # 正常显示负号# 构造三维数据点(6个)
points = np.array([[1, 2, 3],[2, 1, 4],[3, 3, 7],[4, 2, 6],[5, 2, 7],[4, 6, 11],
])x = points[:, 0]
y = points[:, 1]
z = points[:, 2]
n = points.shape[0]#数据点个数# ------------------------构建系数矩阵和常数向量-----------------------------
A = np.array([[sum(x ** 2), sum(x * y), sum(x)],[sum(x * y), sum(y ** 2), sum(y)],[sum(x), sum(y), n]])B = np.array([[sum(x * z)],[sum(y * z)],[sum(z)]])# 方程求解,np.linalg.solve(A,B)表示求 AX = B 的解X
X = np.linalg.solve(A, B)
print('平面拟合结果为:z = %.3f * x + %.3f * y + %.3f' % (X[0], X[1], X[2]))a,b,c = X[0],X[1],X[2]# 可视化
fig = plt.figure(figsize=(10, 7))
ax = fig.add_subplot(111, projection='3d')# 设置坐标轴和标题
ax.set_xlabel('X', fontsize=12)
ax.set_ylabel('Y', fontsize=12)
ax.set_zlabel('Z', fontsize=12)
ax.set_title('最小二乘法线性回归拟合平面', fontsize=14)min_pt = np.amin(points, axis=0) # 获取坐标最小值
max_pt = np.amax(points, axis=0) # 获取坐标最大值# 绘制数据点
ax.scatter(x, y, z,#点坐标c='red',#点颜色s=60, #点大小label='数据点')# 生成网格点绘制平面
xx = np.linspace(min_pt[0], max_pt[0], 100)
yy = np.linspace(min_pt[1], max_pt[1], 100)
xx, yy = np.meshgrid(xx,yy)#生成网格
zz = a * xx + b * yy + c# 绘制平面
ax.plot_surface(xx, yy, zz,color= "blue",#平面颜色alpha=0.5,#透明度 0~1label=f'拟合平面')plt.show()运行结果:
3.梯度下降法
梯度下降法的实现可以参考我的另一篇博客,最小二乘法拟合直线里的讲解:
最小二乘法拟合直线,用线性回归法、梯度下降法实现-CSDN博客文章浏览阅读222次,点赞7次,收藏4次。对于每个数据点,预测值为最小化所有数据点的误差平方和:最终目标就是找到使总误差S最小的a、b,这可以通过S分别对a、b求偏导,并令偏导数 = 0来实现梯度下降(Gradient Descent)是一种迭代优化算法,通过不断沿损失函数负梯度方向更新参数,逐步逼近最优解。https://blog.csdn.net/m0_55908255/article/details/148018256?spm=1011.2415.3001.5331思路是完全一致的,这里就不再赘述了
4.PCA法拟合平面
PCA 全称 Principal Components Analysis,即主成分分析技术。大家应该都听过这个名字,但对于其原理可能不太熟悉,说实话我也不懂它的原理,所以这一块我就将PCA法拟合平面的具体流程,后面会举手工计算例子和Python实现的例子
另外,利用PCA法拟合平面还可以求出所拟合平面的法向量
4.1 最小二乘法 vs PCA 拟合平面的本质区别
在开始 PCA 拟合平面的具体过程前,必须先明确两种方法的根本差异:
| 最小二乘法 (线性回归) | PCA (主成分分析) | |
|---|---|---|
| 优化目标 | 最小化因变量 (Z) 的预测误差 | 最小化数据点到平面的垂直距离 |
| 几何意义 | 垂直Z轴方向的误差平方和 | 真正的几何最短距离 |
| 算法优势 | 更适合预测任何(给定xy预测z) | PCA更能反映数据的真实空间分布 |
4.2 PCA算法流程
① 数据准备
给定 n 个三维数据点 ,将其拼成一个矩阵X表示,如下:
② 中心化数据
求出x维的均值 ,y维的均值
,z维的均值
,每一维的数据都对应减去该维的均值,此过程叫做中心化数据,也叫特征中心化,得到矩阵
,如下:
③ 计算协方差矩阵 :
注: 为
矩阵
④ 计算特征值和特征向量:
解特征方程 ,将的求出特征值按大到小排序,分别是
,其对应的特征向量
⑤ 选择平面法向量,得出拟合平面:
平面法向量:最小特征值 对应的特征向量
即为拟合平面的法向量,
的分量即为 a、b、c
拟合平面方程:
其中, 即为前面所求的均值
🆗,以上就是整个PCA的算法流程,其实还是比较清晰的,但要搞懂原理还是有点难的,原理部分以后再说吧
4.2 案例演示
4.2.1 手工计算实例
① 数据准备
假设有以下数据点:
将其拼接成一个矩阵 表示,如下:
② 中心化数据
计算均值:
中心化数据, -->
:
③ 计算协方差矩阵 :
④ 计算特征值和特征向量:
解特征方程 ,特征值:
最小特征值 对应的特征向量(作为拟合平面的法向量)为:
⑤ 选择平面法向量,得出拟合平面:
平面法向量:最小特征值 对应的特征向量
即为拟合平面的法向量,因此:
拟合平面方程:
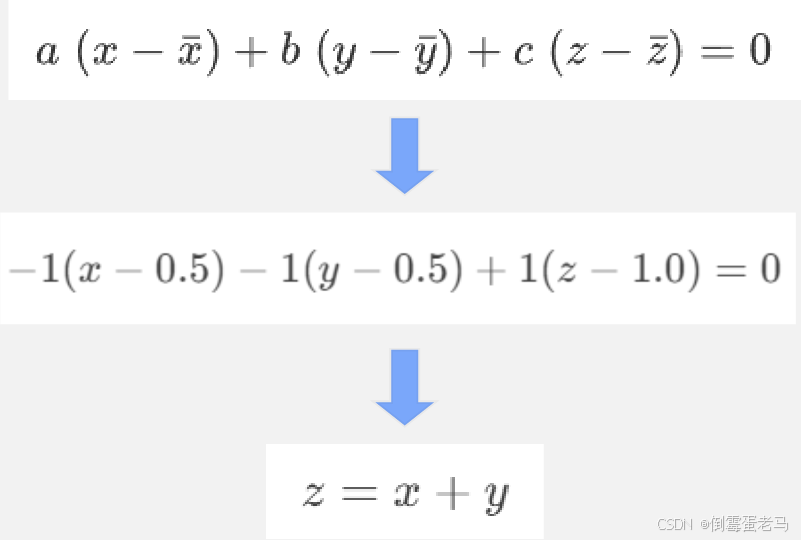
所以PCA法最终拟合的平面方程为 ,该平面的法向量为:
🆗,以上就是整个手工计算过程,不算难,需要一些《线性代数》的相关基础
4.2.2 使用 Python 实现
我们将 4.2.1 中的手工计算例子使用 Python 来实现,并作可视化,代码如下:
import numpy as np
import matplotlib.pyplot as pltplt.rcParams["font.sans-serif"] = ["SimHei"] #设置字体,可以显示中文
plt.rcParams["axes.unicode_minus"] = False # 正常显示负号# 1,数据准备:构造三维数据点
points = np.array([[0, 0, 0],[1, 0, 1],[0, 1, 1],[1, 1, 2],
])# 2.中心化数据
centroid = np.mean(points, axis=0) #计算均值 [μ_x, μ_y, μ_z]
centered_points = points - centroid #中心化数据# 3.计算协方差矩阵C
cov_matrix = np.cov(centered_points.T) #计算协方差矩阵C (3x3)# 4.解特征方程,计算特征值和特征向量
eigenvalues, eigenvectors = np.linalg.eig(cov_matrix) #解特征方程
#eigenvalues:特征向量
#eigenvactors:特征向量# 5.选择平面向量,得出拟合平面方程
min_eigen_idx = np.argmin(eigenvalues) # 找到最小特征值索引
normal_vector = eigenvectors[:, min_eigen_idx] #找到最小特征值对应的特征向量,作为拟合平面的法向量[a, b, c]a, b, c = normal_vector
d = -np.dot(normal_vector, centroid)
'''
d = - [a,b,c] dot [μ_x, μ_y, μ_z] = -(a * μ_x + b * μ_y + c * μ_z)
'''
print(f"平面方程: {a:.4f}x + {b:.4f}y + {c:.4f}z + {d:.4f} = 0")# 6.可视化
fig = plt.figure(figsize=(10, 7))
ax = fig.add_subplot(111, projection='3d')# 设置坐标轴和标题
ax.set_xlabel('X', fontsize=12)
ax.set_ylabel('Y', fontsize=12)
ax.set_zlabel('Z', fontsize=12)
ax.set_title('PCA法拟合平面', fontsize=14)min_pt = np.amin(points, axis=0) # 获取坐标最小值
max_pt = np.amax(points, axis=0) # 获取坐标最大值# 绘制数据点
ax.scatter(points[:,0], points[:,1], points[:,2],#点坐标(x,y,z)c='red',#点颜色s=60, #点大小label='数据点')# 生成网格点绘制平面
xx = np.linspace(min_pt[0], max_pt[0], 100)
yy = np.linspace(min_pt[1], max_pt[1], 100)
xx, yy = np.meshgrid(xx,yy)#生成网格
zz = (-a*xx - b*yy - d) / c #解平面方程z# 绘制平面
ax.plot_wireframe(xx, yy, zz,color= "blue",#平面颜色alpha=0.5,#透明度 0~1label=f'PCA拟合平面')# 绘制法向量(从均值点出发)
normal_vector = eigenvectors[:, min_eigen_idx] # 法向量 [a, b, c]
normalized_normal = normal_vector / np.linalg.norm(normal_vector) # 单位化
ax.quiver(centroid[0], centroid[1], centroid[2], # 起点(平面中心)normalized_normal[0], normalized_normal[1], normalized_normal[2], # 方向color='black',#颜色length=0.5, # 箭头长度(根据数据范围调整)arrow_length_ratio=0.1, # 箭头头部比例label='法向量'
)plt.legend()
plt.show()运行结果:
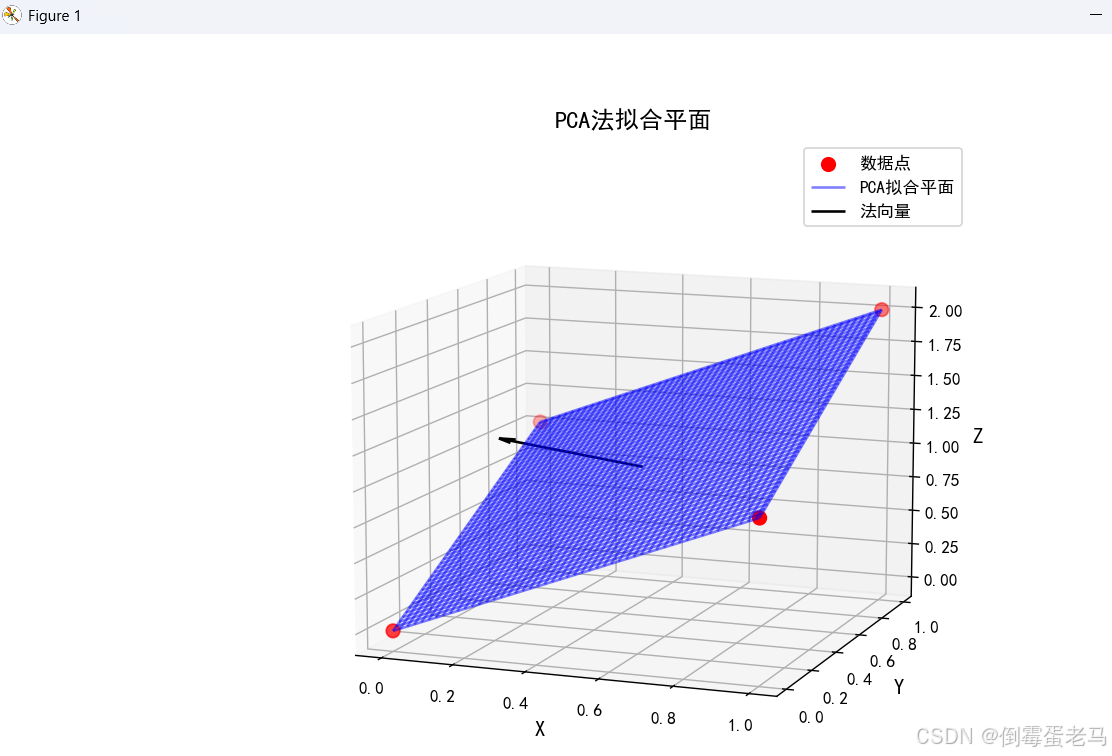
优雅~,太优雅了😈
4.2.3 Open3D 实现PCA法拟合
😈待更新....
5.SVD分解法
😈待更新....