动态规划-63.不同路径II-力扣(LeetCode)
一、题目解析
与62.不同路径不同的一点是现在网格中有了障碍物,其他的并没有什么不同
二、算法解析
1.状态表示
dp[i][j]表示:到[i,j]位置时,不同的路径数
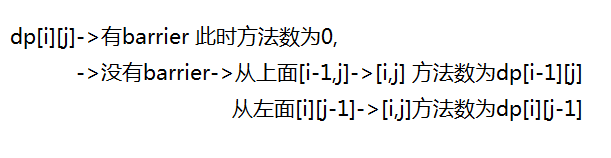
2.状态转移方程
由于多了障碍物,所以我们要判断是否遇到障碍物
3.初始化
我们要保证初始化后(1)保证后面填表是正确的(2)下标的映射关系
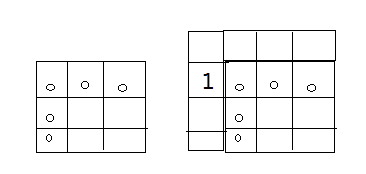
观察左边带圆圈的位置,可以发现在初始化的时候会有越界访问的问题,所以就有了右图的解决方法,多加一行一列,并初始化dp[1][0] = 1,为什么只初始化这一个值呢?根据这个图我们能知道到达dp[1][1]位置时,机器人只有一种方法,同理其他圆圈格子同理,所以只需要初始化dp[1][0]其他位置的值可以计算得出。
这里的映射关系为dp[i][j] == obstacleGrid[i-1][j-1],即横纵坐标都-1.
4.填表顺序
为了保证填表时所需值存在,从左往右,从上往下,完成填表
5.返回值
由题需要返回到达右下角的方法数,所以返回dp[m][n]
虽然62没有很大区别,但还是建议自己去上手写一遍,链接:63. 不同路径 II - 力扣(LeetCode)
三、代码示例
class Solution {
public:int uniquePathsWithObstacles(vector<vector<int>>& obstacleGrid) {int m = obstacleGrid.size();int n = obstacleGrid[0].size();vector<vector<int>> dp(m+1,vector<int>(n+1));dp[1][0] = 1;for(int i = 1;i<=m;i++){for(int j = 1;j<=n;j++){if(obstacleGrid[i-1][j-1] == 0){dp[i][j] = dp[i-1][j] + dp[i][j-1];}}}return dp[m][n];}
}; 
看到最后,如果对您有所帮助还请点赞、收藏,我们下期再见!