游戏AI研究所-Stable Diffusion中LoRA(Low-Rank Adaptation)的定义及权重的作用机制
Ⅰ.定义:
LoRA(Low-Rank Adaptation)是一种高效的微调技术,最初由微软研究人员提出,旨在通过引入可训练的低秩矩阵,冻结大模型的大部分参数,从而实现低资源消耗下的高效微调。在图像生成领域,LoRA被广泛应用于Stable Diffusion等模型中,用于快速定制特定风格、角色或材质的图像生成。
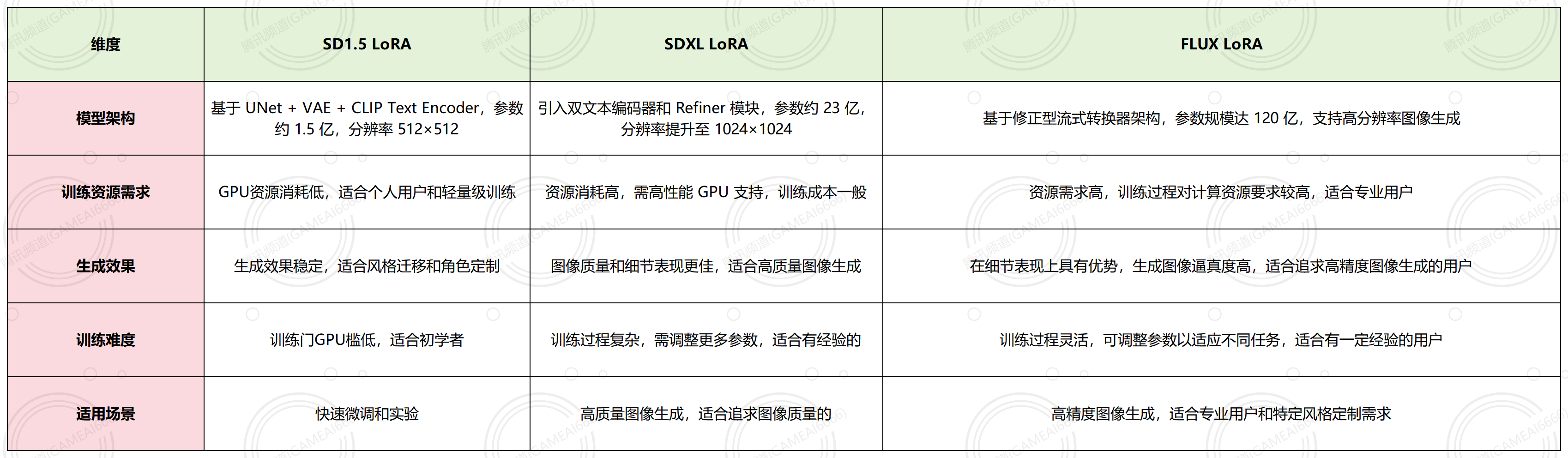
Ⅱ.Stable Diffusion 1.5(SD1.5)、Stable Diffusion XL(SDXL) 和 FLUX 三种模型中 LoRA(Low-Rank Adaptation)微调技术的对比分析
SD1.5 LoRA:适合算力资源有限的用户进行快速微调和实验,拥有大量现成的 LoRA 模型,适合风格迁移和角色定制。
SDXL LoRA:适合追求高质量图像生成的用户,图像质量和细节表现更佳,但训练过程复杂,需高性能 GPU 支持。
FLUX LoRA:在细节表现上具有优势,生成图像逼真度高,适合追求高精度图像生成的专业用户,训练过程灵活,可调整参数以适应不同任务。
例如:下图
Ⅲ. LoRA 的权重含义
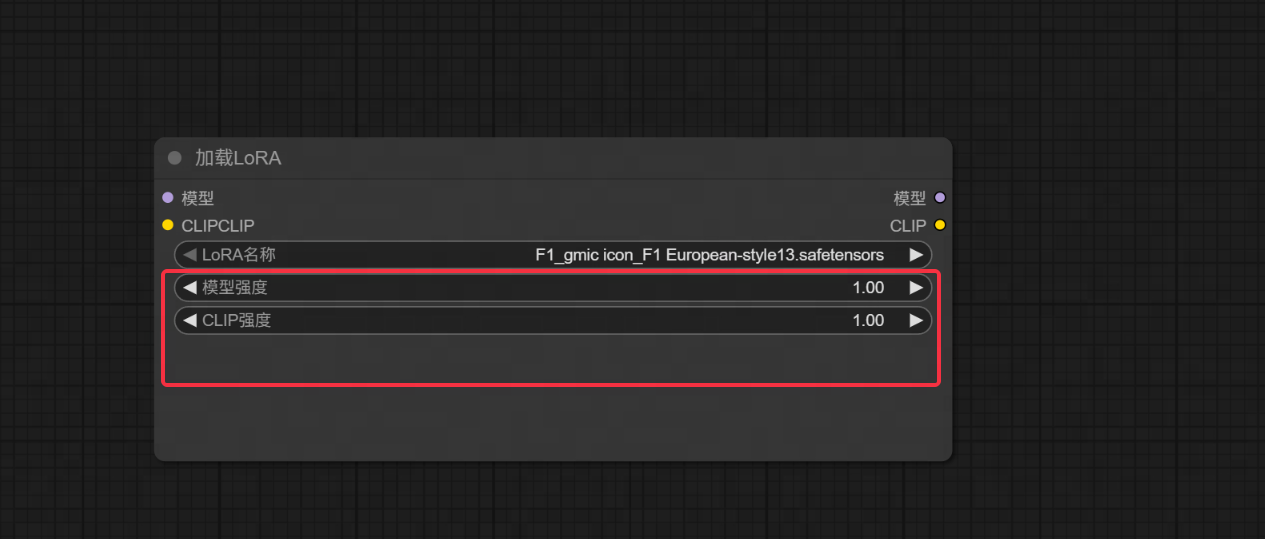
LoRA 权重(strength):
这是指在使用 LoRA 模型时,用户可以设置的一个参数,通常在 0 到 1 之间,表示 LoRA 对原始模型影响的程度。
例如,设置为 0.8 表示 LoRA 模型对生成结果的影响程度为 80%。
较高的权重会使 LoRA 的特征更明显,较低的权重则使其影响减弱。
CLIP 权重(strength_clip):
CLIP 模块负责将文本提示词编码为向量,以指导图像生成。
LoRA 可以对 CLIP 模块进行微调,以更好地理解特定的提示词或风格。
CLIP 权重控制 LoRA 在 CLIP 模块中的影响程度,调整该值可以改变模型对提示词的理解和响应。
Ⅳ.LoRA 权重的作用机制
比如:你有一台功能强大的咖啡机(预训练模型),它可以制作多种咖啡。现在,你想让它制作一种新的特色咖啡,但不想更换整台机器。于是,你添加了一个小型的附件(LoRA 模块),这个附件可以调整咖啡的风味,使其符合你的新需求。
LoRA 权重(strength): 控制 LoRA 模块对模型输出的整体影响程度。
mingchao.wang
CLIP 权重(strength_clip): 在图像生成任务中,CLIP 模块用于理解文本提示。CLIP 权重控制 LoRA 对文本编码部分的影响程度。
具体机制:
冻结原始模型参数: 在微调过程中,原始模型的参数保持不变,避免了对整个模型的重新训练。
引入低秩矩阵: 在模型的特定位置(如 Transformer 的注意力层),添加两个小型的可训练矩阵 A 和 B。
调整输出: 这两个矩阵的乘积(A × B)会生成一个调整值,添加到原始模型的输出中,从而改变模型的行为。
权重控制影响程度: LoRA 的权重参数决定了这些调整对模型输出的影响程度。较高的权重意味着更大的影响,较低的权重则表示影响较小。