当前位置: 首页 > news >正文 无人机避障——深蓝学院浙大Fast-planner学习部分(前端部分) news 2025/10/14 15:38:44 Fast-Planner: Front-End: 【注意】:会加入一定概率的一步shot的的AnalyticExpand方法。 Primitives Generation: 【注意】:每个方向都可以写成多项式方程系数的方式。 查看全文 http://www.dtcms.com/a/193102.html 相关文章: SpringBoot基础(静态资源导入) 渗透测试流程-上篇 XBL6501/02/03在POE设备上的应用方案 常用的关系性统计方法 受控组件和非受控组件的适用场景分别是什么? GRE作文总结和归纳 web第二次课后作业--设计一个注册登录系统 涨薪技术|0到1学会性能测试第65课-SQL捕获阻塞事件 Vue3学习(组合式API——reactive()和ref()函数详解) 实验5 DNS协议分析与测量 HttpServletRequest常用功能简介-笔记 SpringAOP openEuler24.03 LTS下安装MySQL8.0.42 Linux 动态库热加载 计量——异方差的检验及其修正 报考叉车证需要参加哪些培训和考试? 24小时不打烊的知识宝库——RFID智能书柜 SpringBoot 3.4.5版本导入Lomobok依赖后无法生效的问题 Vuex和Vue的区别 计算机组成与体系结构:替换策略(MRU LRU PLRU LFU) WebRTC技术下的EasyRTC音视频实时通话SDK,助力车载通信打造安全高效的智能出行体验 HDFS的概述 竞品分析是什么,包括哪些内容?AI竞品分析生成器推荐! 人工智能、深度学习、机器学习的联系与区别 英语学习笔记 Java零基础学习Day14——面向对象进阶 算法图表总结:查找、排序与递归(含 Mermaid 图示) ORACLE 11.2.0.4 数据库磁盘空间爆满导致GAP产生 力扣.1471数组的k个最强值,力扣.1471数组的k个最强值力扣1576.替换所有的问号力扣1419.数青蛙编辑力扣300.最长递增子序列 小程序映射逻辑处理
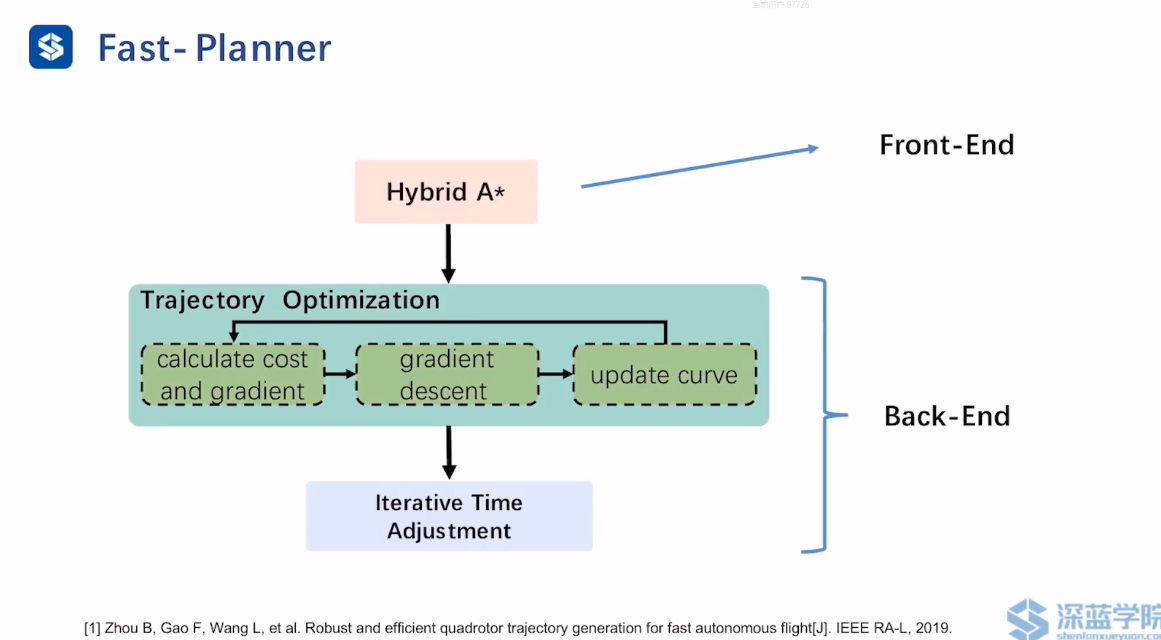
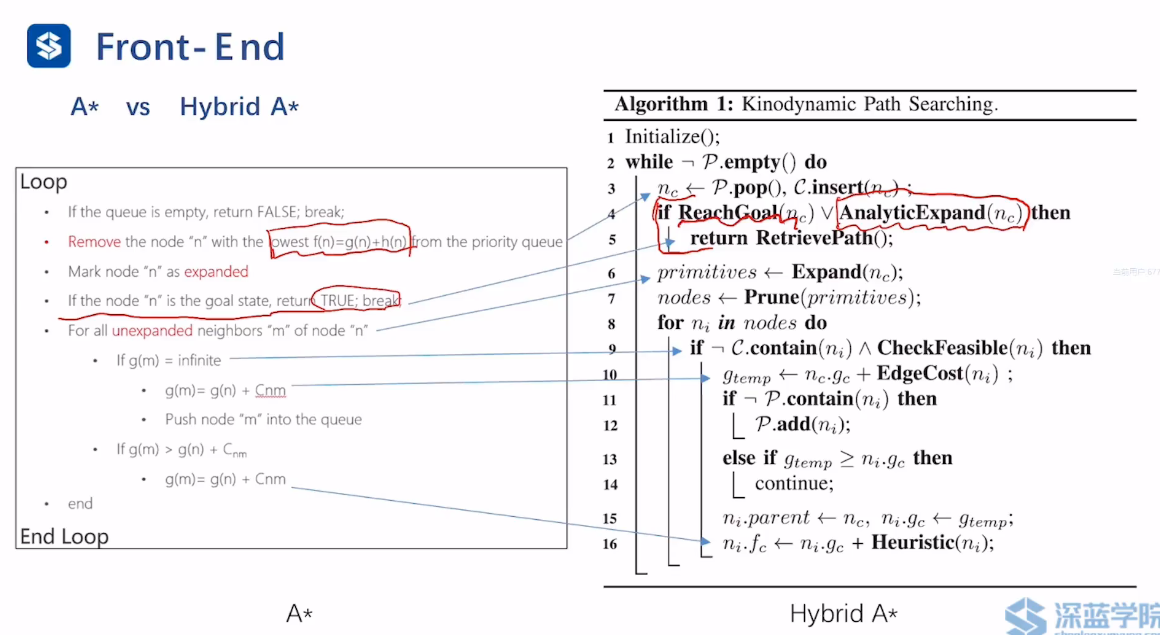
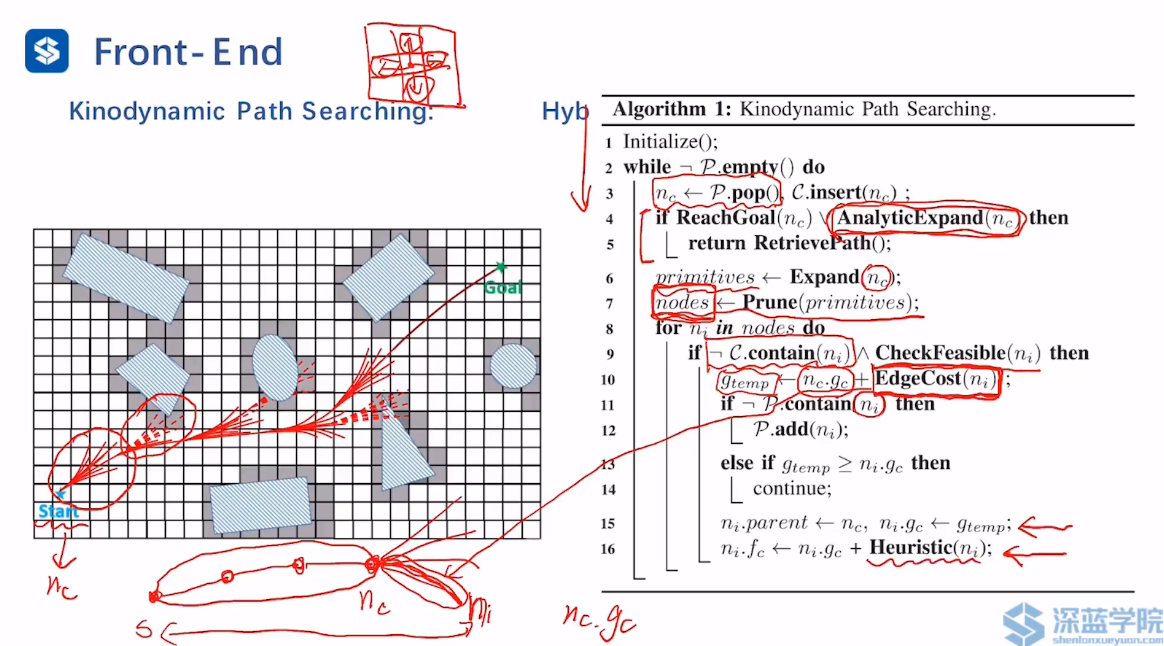
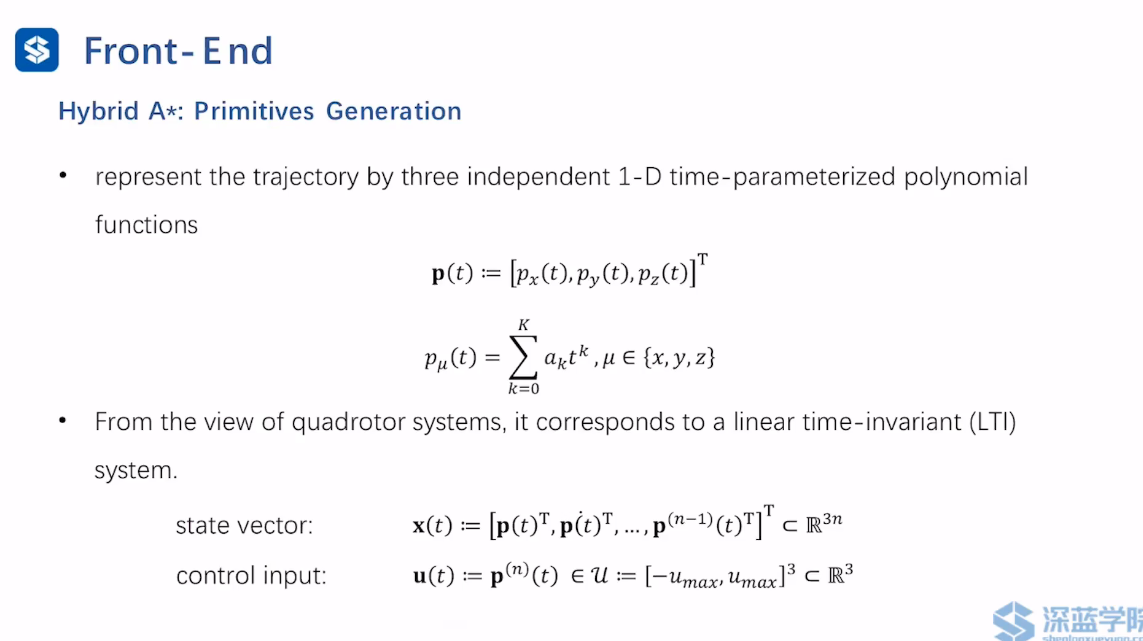
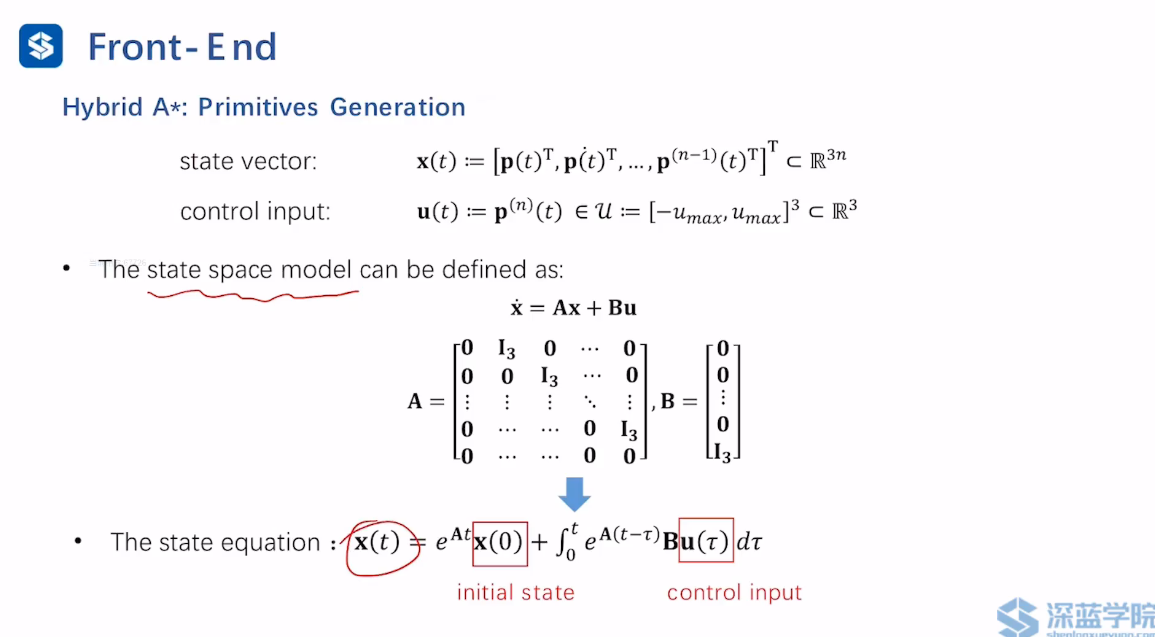
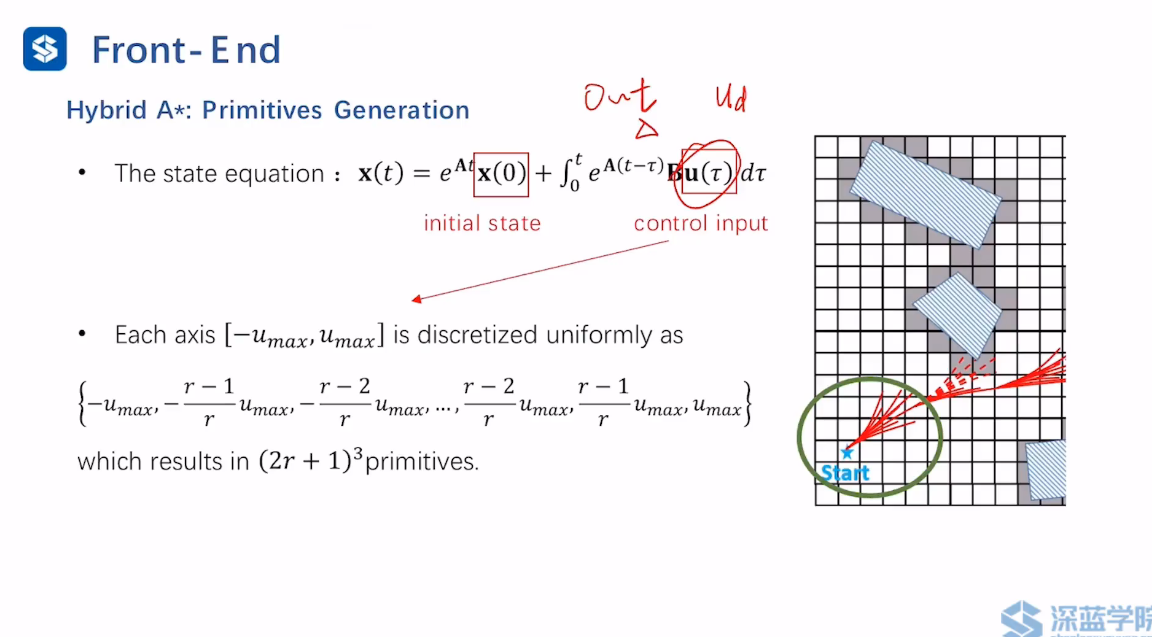
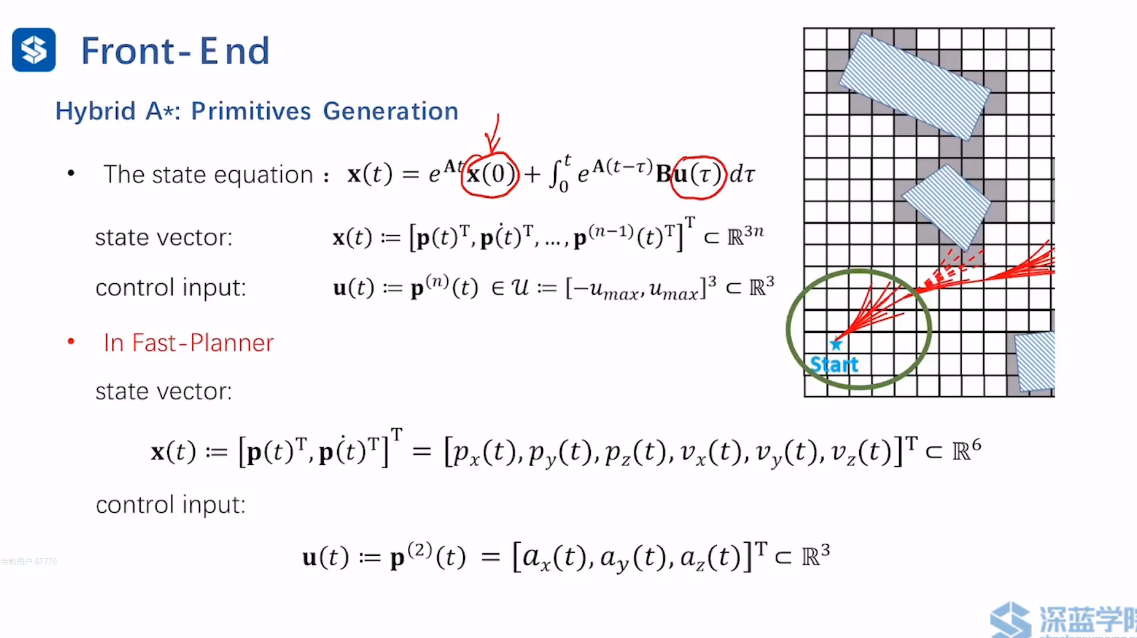
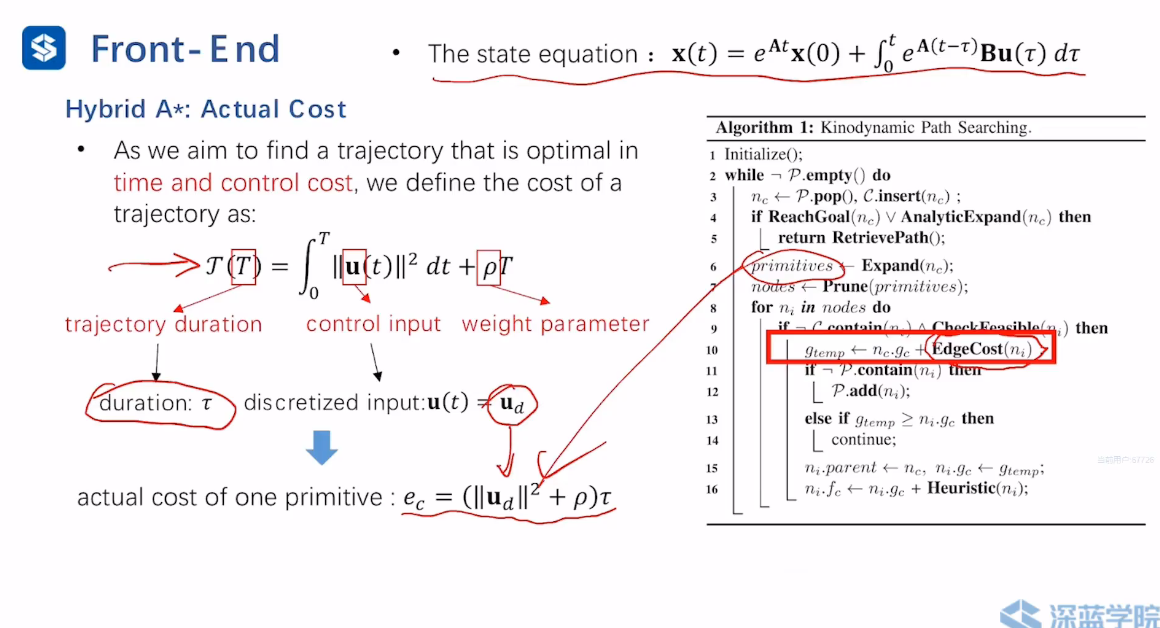
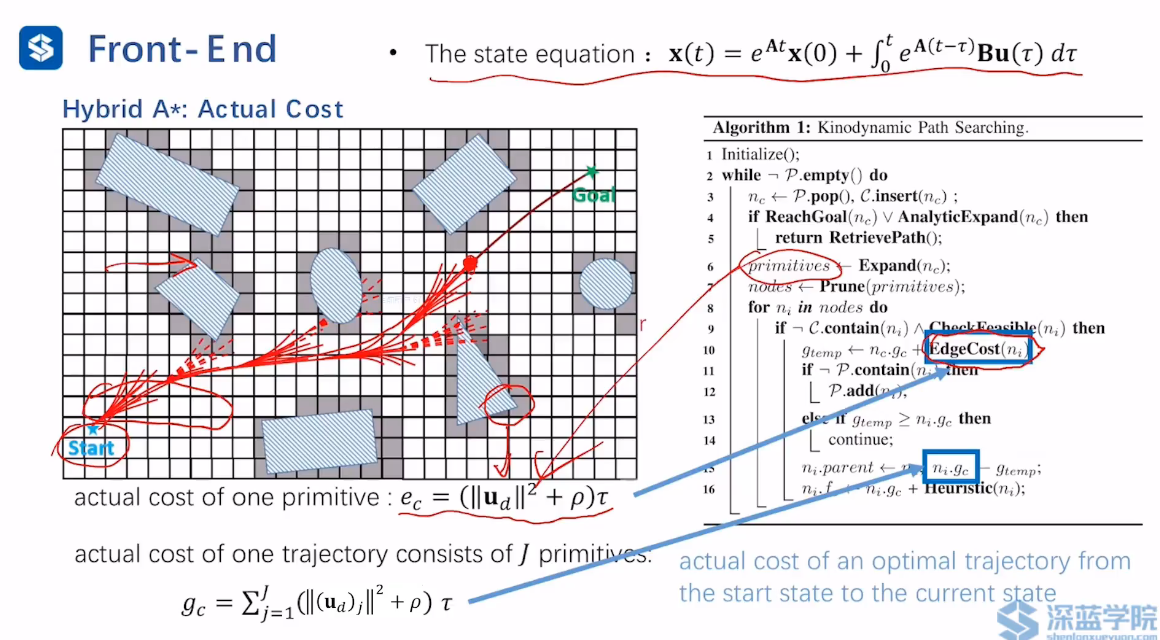
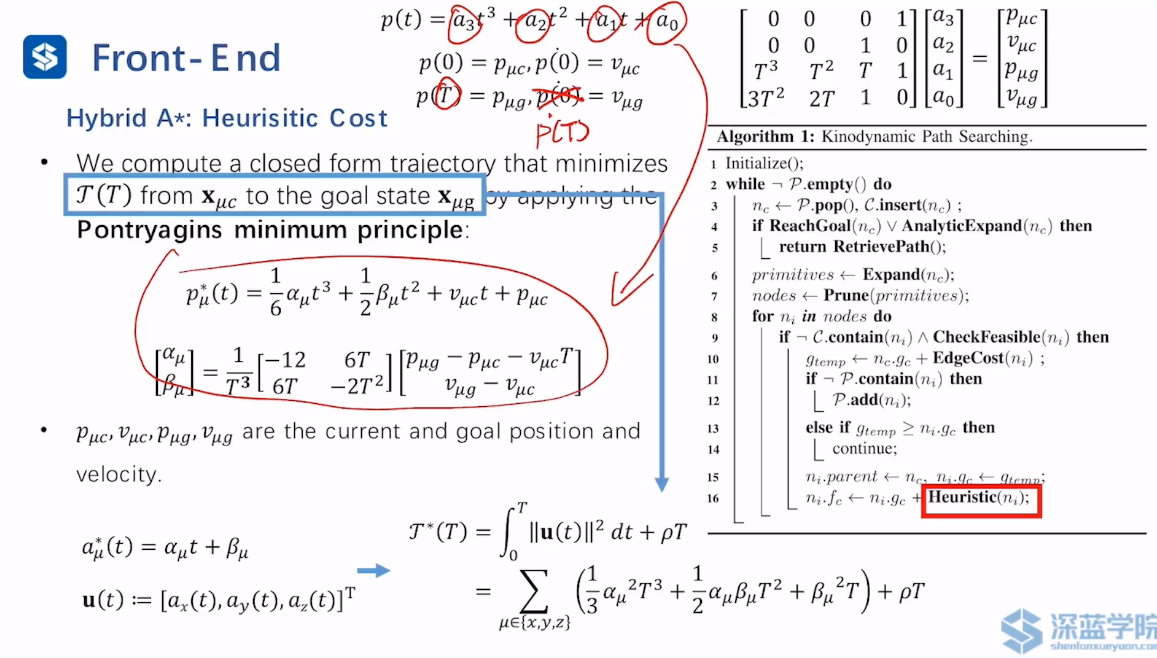
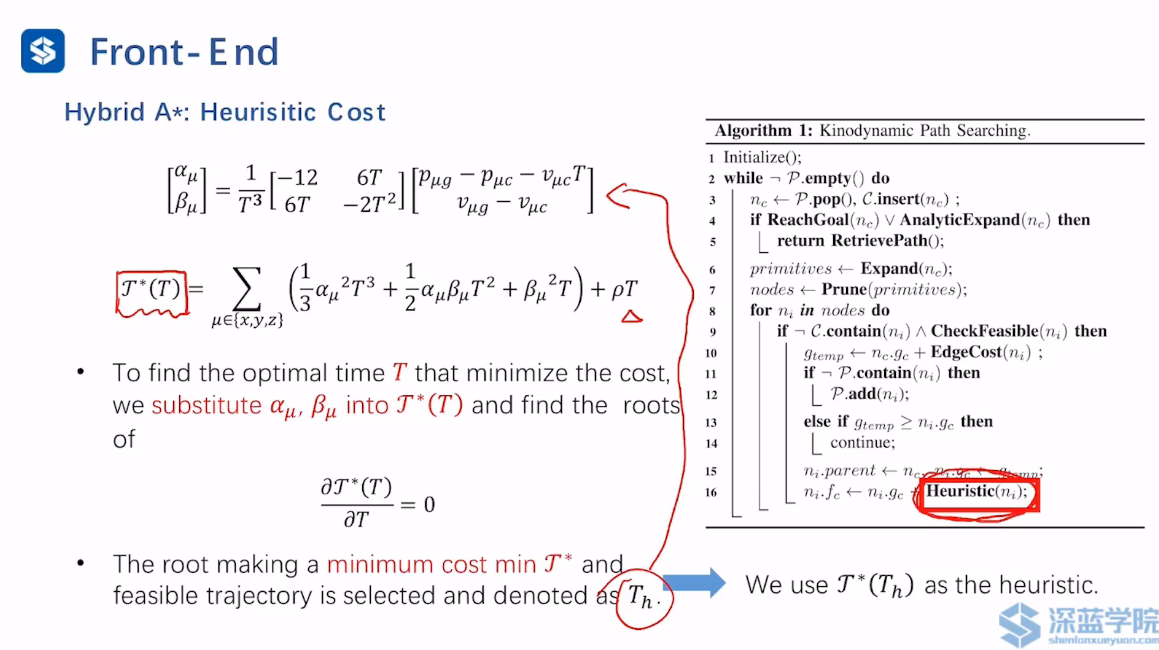
Fast-Planner: Front-End: 【注意】:会加入一定概率的一步shot的的AnalyticExpand方法。 Primitives Generation: 【注意】:每个方向都可以写成多项式方程系数的方式。