Vitrualbox完美显示系统界面(只需三步)
目录
1.使用vitrualbox的增强功能:编辑
2.安装增强功能(安装完后要重启虚拟机):
3. 调整界面尺寸(如果一个选项不行的话,就多试试其他不同的百分比):
先看看原来的,界面很小很挤,放大也没法改变。

1.使用vitrualbox的增强功能: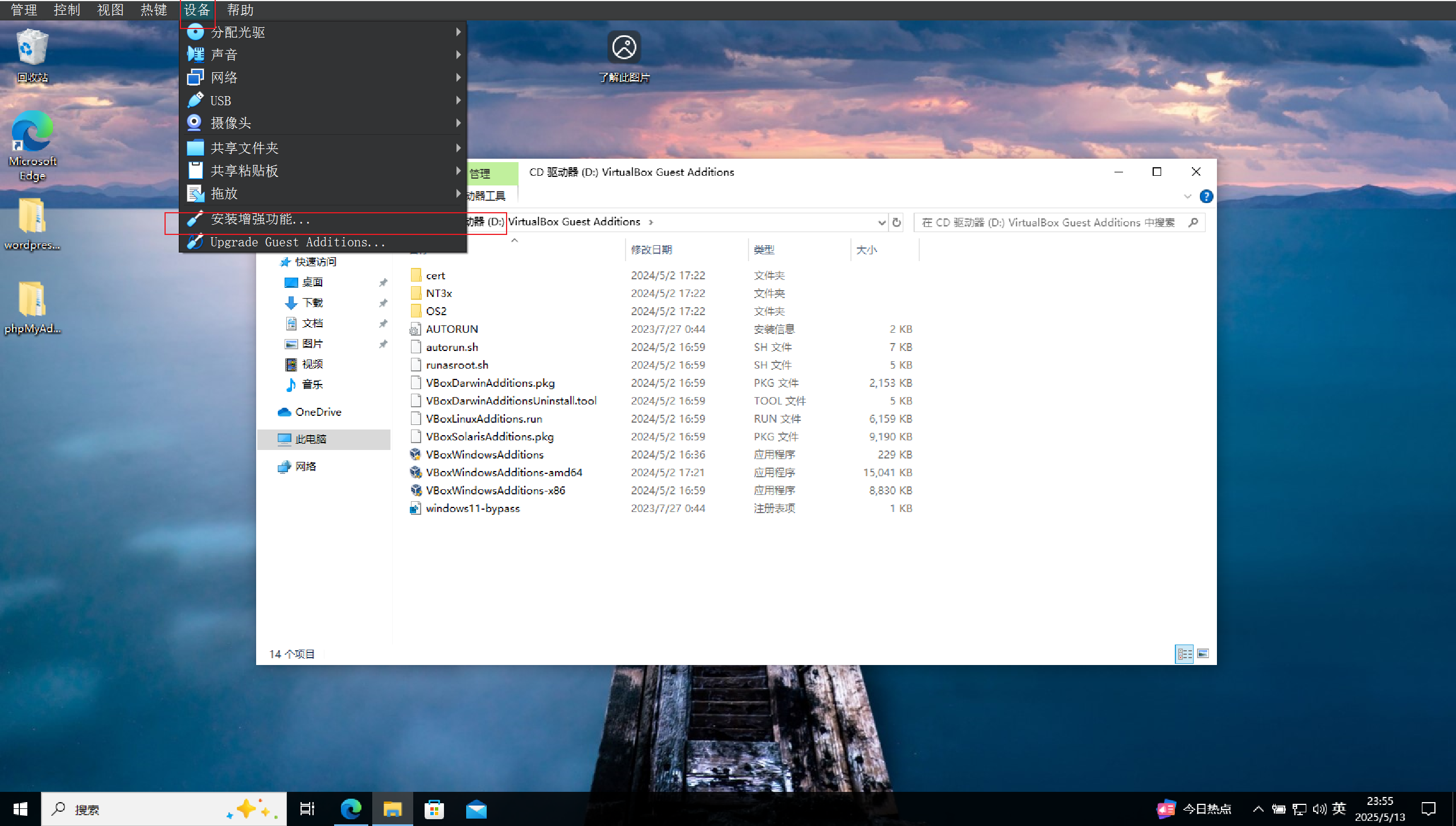
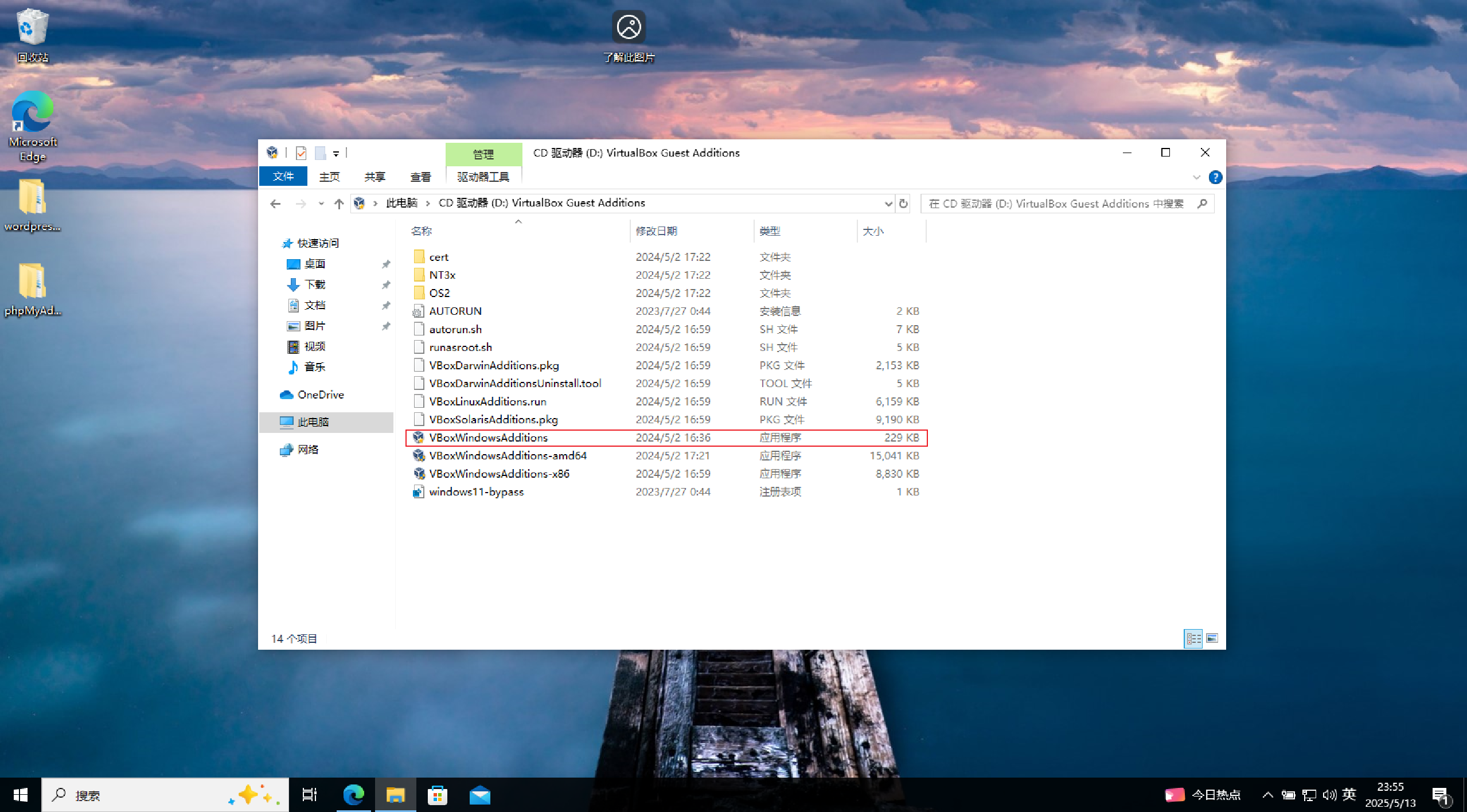
2.安装增强功能(安装完后要重启虚拟机):
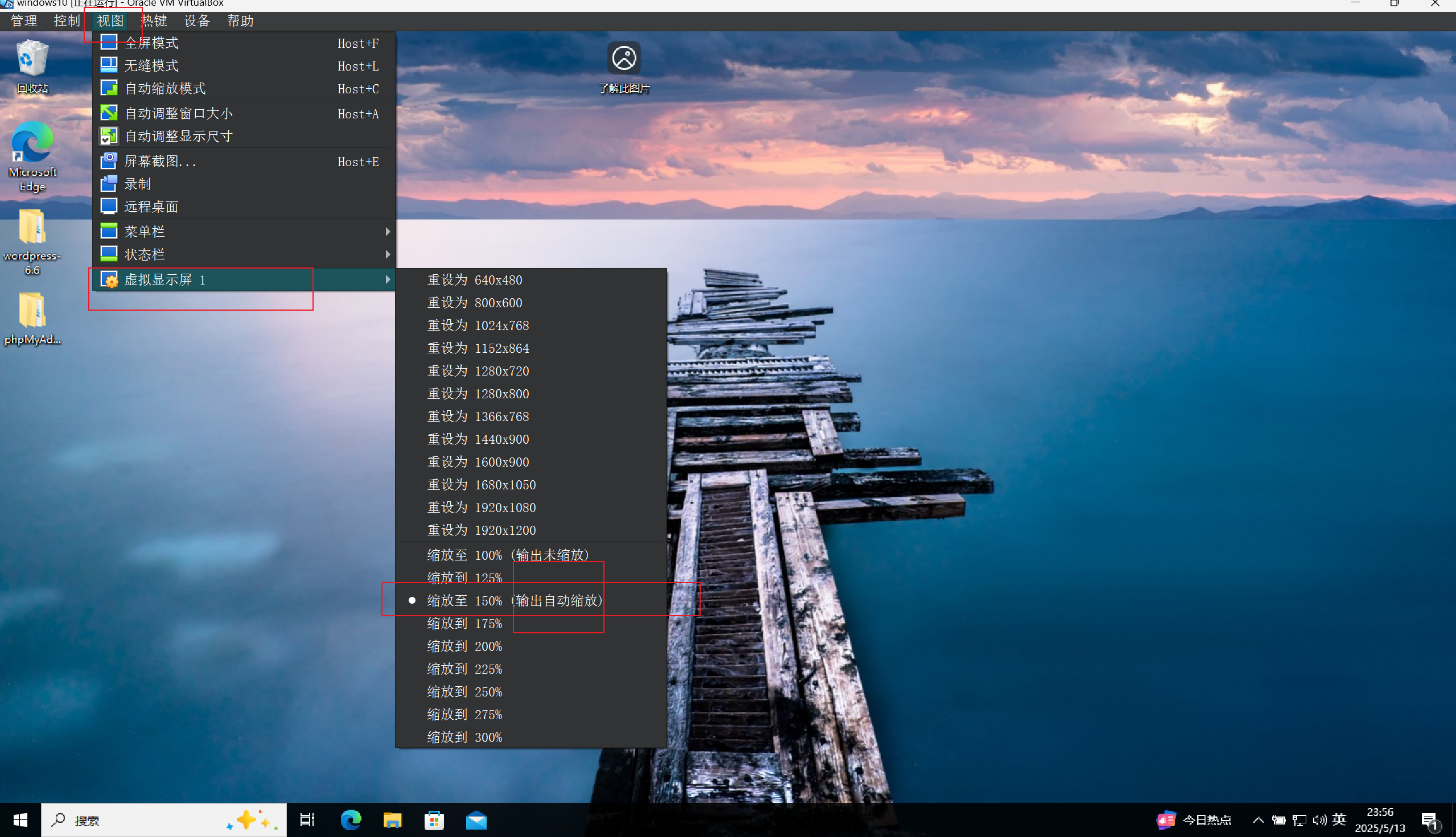
3. 调整界面尺寸(如果一个选项不行的话,就多试试其他不同的百分比):
完成状态:
目录
1.使用vitrualbox的增强功能:编辑
2.安装增强功能(安装完后要重启虚拟机):
3. 调整界面尺寸(如果一个选项不行的话,就多试试其他不同的百分比):
先看看原来的,界面很小很挤,放大也没法改变。
完成状态: