Ubuntu20.04如何优雅的安装ROS 1(胎教级教程)
1、USTC的源:
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
2、设置的ROS源添加密钥:
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C6543.安装ROS1:
sudo apt updatesudo apt install ros-noetic-desktop-full
4.设置环境变量 :
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc5、添加依赖:
sudo apt-get install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential6、安装rosinstall:
sudo apt install python3-pipmkdir ~/.pip
cd ~/.pip
touch pip.conf
sudo gedit ~/.pip/pip.conf# 在上面弹出的文件中写下下面的内容
[global]
index-url = https://pypi.tuna.tsinghua.edu.cn/simple/
[install]
trusted-host = pypi.tuna.tsinghua.edu.cnsudo pip install rosdepc
sudo rosdepc init
rosdepc update
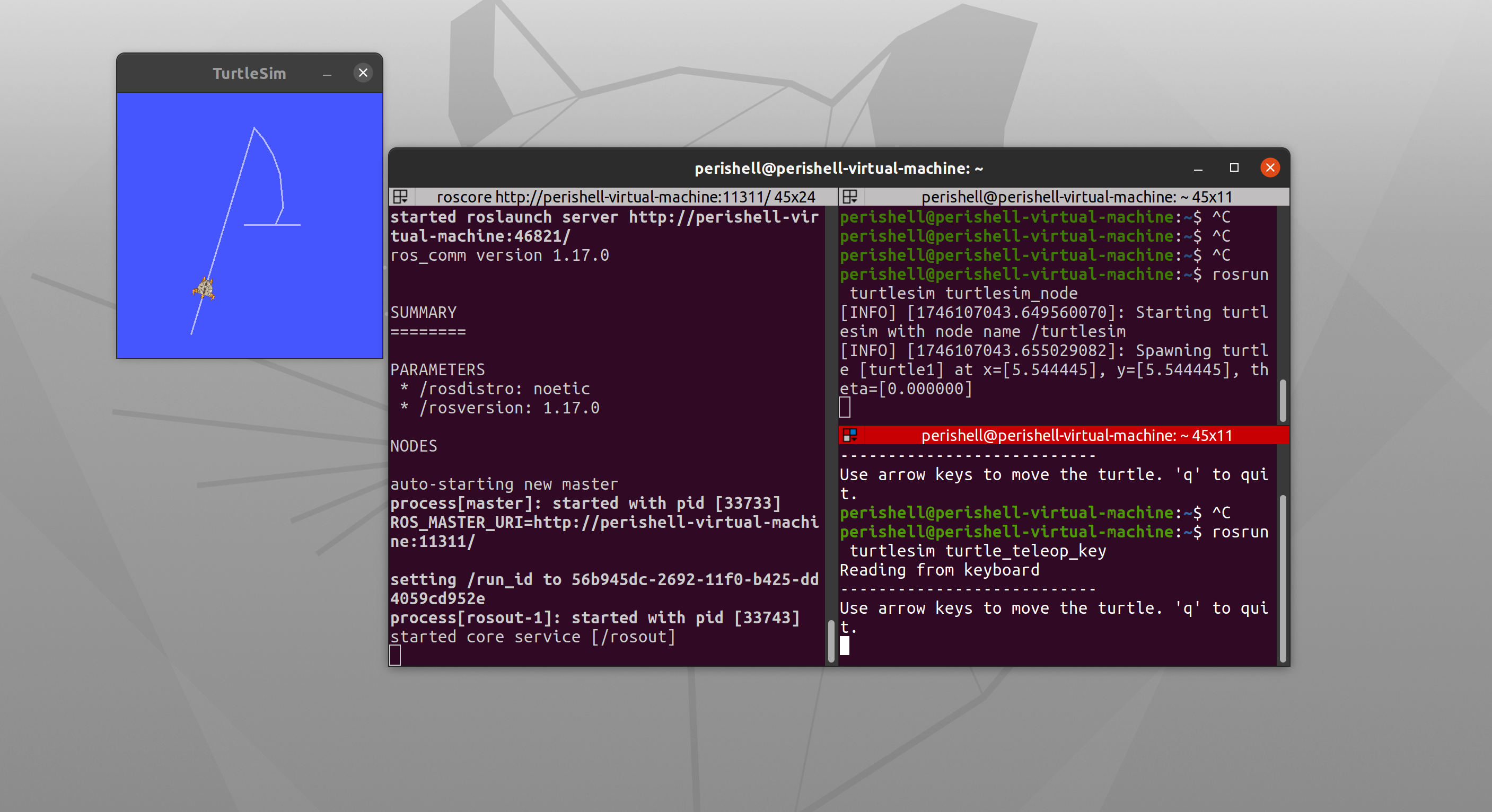
7、检查安装是否成功:
roscorerosrun turtlesim turtlesim_noderosrun turtlesim turtle_teleop_key8、最后的结果:
9、参考博客网址:
【ROS】Ubuntu20.04.5安装ROS1【教程】-CSDN博客