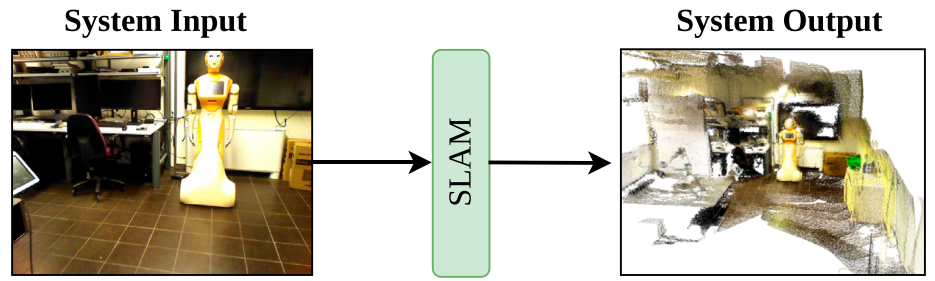
当前位置: 首页 > news >正文 1.7 点云数据获取方式——视觉SLAM news 2025/10/31 19:21:06 图1-7-1 Visual SLAM生成的点 查看全文 http://www.dtcms.com/a/164480.html 相关文章: 深度循环神经网络 逆传播AIGEO营销:破局生成式搜索时代,让AI成为品牌代言人! 科研入门规划 AI时代来临将带来文科复兴 数据库中DDL、DML、DCL的区别是什么? vue+cesium线流动纹理 c# 获取当前程序的路径 OpenJDK 1.8中-Xloggc参数下GC日志覆盖与追加模式深度解析 基于esp32的小区智能门禁集成系统设计和实现 RoPE 相对位置编码 VS 传统位置编码 【强化学习系列】Q-learning——从贝尔曼最优方程谈起 【MCP Node.js SDK 全栈进阶指南】高级篇(2):MCP高性能服务优化 【无标题】好用的远程链接插件 DNA复制过程3D动画教学工具 C语言按位操作符 道德经解读分析 端到端电力电子建模、仿真与控制及AI推理 您好,当前系统不允许绑定该店,具体原因您可咨询系统服务商,我们将尽力为您解决 Python核心机制与实战技巧:从变量作用域到GIL的深度解析 焊接与热切割作业精选判断真题及答案 监控易一体化运维:解锁业务系统管理,助力企业运维升级 什么是ICSP编程 BIM(建筑信息模型)与GIS(地理信息系统)的融合的技术框架、实现路径与应用场景 JAVA--- 关键字static JSON配置文件格式全解析与多语言实战指南 合并两个有序链表 第十五章-PHP文件编程 课程管理:借助教学管理系统,优化教学资源配置 从零构建Dagster分区管道:时间+类别分区实战案例 无人机航拍牛羊检测数据集VOC+YOLO格式1021张3类别小目标