基于 Python 的 ROS2 应用开发全解析
引言
在机器人操作系统(ROS)不断发展的进程中,ROS2 作为新一代的机器人框架,带来了诸多显著的改进与新特性。Python 作为一种简洁、高效且具有强大数据处理能力的编程语言,在 ROS2 应用开发中占据着重要地位。本文将深入探讨如何利用 Python 编写 ROS2 应用,涵盖从基础概念到实际应用案例的各个方面。
ROS2 概述
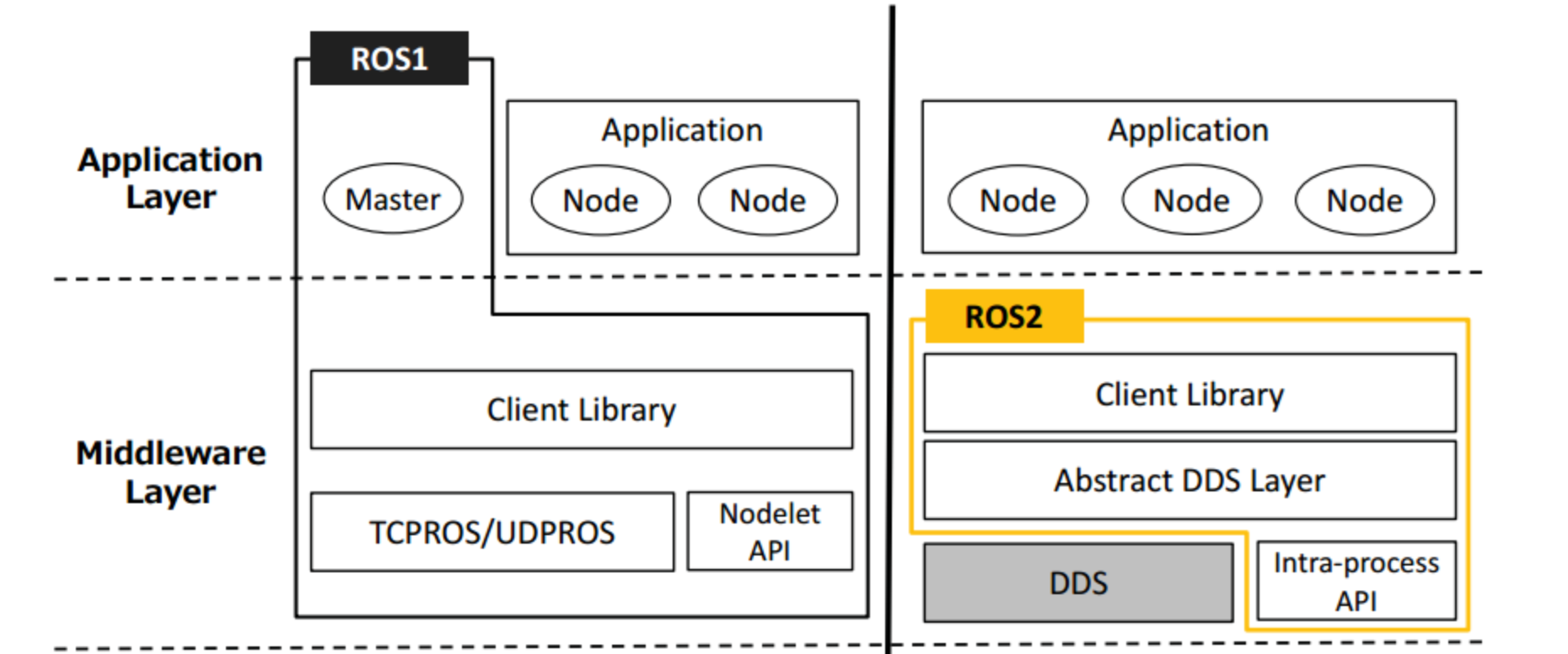
ROS2 相较于 ROS,在架构设计上进行了全面升级。它增强了实时性支持,采用了更先进的通信机制,如基于 DDS(数据分发服务)的通信框架,使得节点间的通信更加可靠和灵活。同时,ROS2 在跨平台能力上有了极大提升,能够更好地适配不同的操作系统和硬件平台,为机器人开发者提供了更广阔的施展空间。
Python 在 ROS2 开发中的优势
语法简洁,易于上手
Python 以其简洁明了的语法而闻名,代码可读性极高。对于初学者或快速迭代的项目而言,Python 能够大幅降低开发门槛,缩短开发周期。在 ROS2 应用开发中,开发者可以用较少的代码行数实现复杂的功能逻辑,提高开发效率。
丰富的库支持
Python 拥有庞大的开源库生态系统。在 ROS2 开发中,借助 Python 的 numpy、pandas 等库,能够方便地进行数据处理和分析;而 matplotlib 等库则为数据可视化提供了有力工具,有助于开发者更直观地理解机器人运行过程中的各种数据。
良好的集成性
Python 能够与其他编程语言和工具良好集成。在 ROS2 项目中,若某些模块需要更高的性能,可以使用 C++ 等语言编写,然后通过 Python 的接口进行调用,实现优势互补,构建更强大的机器人应用系统。
基于 Python 的 ROS2 应用开发基础
创建 ROS2 工作空间
在开始 ROS2 应用开发前,首先要创建一个工作空间。通过命令行工具,在指定目录下创建工作空间文件夹,并初始化它。例如:
mkdir -p ~/ros2_ws/src
cd ~/ros2_ws
colcon build编写 Python 节点
在 ROS2 中,节点是基本的执行单元。使用 Python 编写节点时,首先要导入 ROS2 相关的 Python 库。例如,创建一个简单的发布者节点:
import rclpy
from rclpy.node import Node
from std_msgs.msg import Stringclass MinimalPublisher(Node):def __init__(self):super().__init__('minimal_publisher')self.publisher_ = self.create_publisher(String, 'topic', 10)timer_period = 0.5 # secondsself.timer = self.create_timer(timer_period, self.timer_callback)self.i = 0def timer_callback(self):msg = String()msg.data = 'Hello World: %d' % self.iself.publisher_.publish(msg)self.get_logger().info('Publishing: "%s"' % msg.data)self.i += 1def main(args=None):rclpy.init(args=args)minimal_publisher = MinimalPublisher()rclpy.spin(minimal_publisher)minimal_publisher.destroy_node()rclpy.shutdown()if __name__ == '__main__':main()话题通信
话题通信是 ROS2 中最常用的通信方式之一。除了上述的发布者节点,还需要创建订阅者节点来接收消息。以下是一个简单的订阅者节点示例:
import rclpy
from rclpy.node import Node
from std_msgs.msg import Stringclass MinimalSubscriber(Node):def __init__(self):super().__init__('minimal_subscriber')self.subscription = self.create_subscription(String,'topic',self.listener_callback,10)self.subscription # prevent unused variable warningdef listener_callback(self, msg):self.get_logger().info('I heard: "%s"' % msg.data)def main(args=None):rclpy.init(args=args)minimal_subscriber = MinimalSubscriber()rclpy.spin(minimal_subscriber)minimal_subscriber.destroy_node()rclpy.shutdown()if __name__ == '__main__':main()服务通信
除了话题通信,ROS2 还支持服务通信。服务通信用于实现客户端与服务器之间的请求 - 响应模式。下面是一个使用 Python 编写的简单服务端示例:
import rclpy
from rclpy.node import Node
from example_interfaces.srv import AddTwoIntsclass MinimalService(Node):def __init__(self):super().__init__('minimal_service')self.srv = self.create_service(AddTwoInts, 'add_two_ints', self.add_two_ints_callback)def add_two_ints_callback(self, request, response):response.sum = request.a + request.bself.get_logger().info('Incoming request\na: %d b: %d' % (request.a, request.b))return responsedef main(args=None):rclpy.init(args=args)minimal_service = MinimalService()rclpy.spin(minimal_service)rclpy.shutdown()if __name__ == '__main__':main()该服务端提供一个名为add_two_ints的服务,能够处理两个整数相加的请求。对应的客户端代码如下:
import rclpy
from rclpy.node import Node
from example_interfaces.srv import AddTwoInts
import sysclass MinimalClientAsync(Node):def __init__(self):super().__init__('minimal_client_async')self.cli = self.create_client(AddTwoInts, 'add_two_ints')while not self.cli.wait_for_service(timeout_sec=1.0):self.get_logger().info('service not available, waiting again...')self.req = AddTwoInts.Request()def send_request(self):self.req.a = int(sys.argv[1])self.req.b = int(sys.argv[2])self.future = self.cli.call_async(self.req)def main(args=None):rclpy.init(args=args)minimal_client = MinimalClientAsync()minimal_client.send_request()while rclpy.ok():rclpy.spin_once(minimal_client)if minimal_client.future.done():try:response = minimal_client.future.result()except Exception as e:minimal_client.get_logger().info('Service call failed %r' % (e,))else:minimal_client.get_logger().info('Result of add_two_ints: for %d + %d = %d' %(minimal_client.req.a, minimal_client.req.b, response.sum))breakminimal_client.destroy_node()rclpy.shutdown()if __name__ == '__main__':main()客户端通过命令行参数传入两个整数,向服务端发送请求并获取相加的结果。
实际应用案例:基于 Python 的 ROS2 机器人导航应用
系统架构
在一个机器人导航应用中,通常涉及多个节点协同工作。使用 Python 编写的节点可以包括地图构建节点、路径规划节点以及机器人控制节点等。地图构建节点利用传感器数据创建地图,路径规划节点根据地图和目标位置规划出机器人的移动路径,机器人控制节点则根据规划好的路径控制机器人的实际运动。
传感器数据处理
假设机器人配备了激光雷达传感器,用于获取周围环境信息。在 Python 中,可以使用 ROS2 的相关库来订阅激光雷达话题,获取点云数据。例如:
import rclpy
from rclpy.node import Node
from sensor_msgs.msg import LaserScanclass LidarSubscriber(Node):def __init__(self):super().__init__('lidar_subscriber')self.subscription = self.create_subscription(LaserScan,'lidar_topic',self.lidar_callback,10)self.subscription # prevent unused variable warningdef lidar_callback(self, msg):ranges = msg.ranges# 在这里进行点云数据处理,例如障碍物检测等for range_value in ranges:if range_value < 1.0: # 假设1.0米为障碍物距离阈值self.get_logger().info('Obstacle detected!')def main(args=None):rclpy.init(args=args)lidar_subscriber = LidarSubscriber()rclpy.spin(lidar_subscriber)lidar_subscriber.destroy_node()rclpy.shutdown()if __name__ == '__main__':main()路径规划与控制
路径规划节点可以使用 A * 算法或 Dijkstra 算法等在地图上规划出从当前位置到目标位置的最优路径。在 Python 中,可以利用相关的路径规划库实现这些算法。机器人控制节点则根据规划好的路径,通过发布控制指令到机器人的运动控制话题,实现机器人的移动。例如,控制机器人的速度和转向:
import rclpy
from rclpy.node import Node
from geometry_msgs.msg import Twistclass RobotController(Node):def __init__(self):super().__init__('robot_controller')self.publisher_ = self.create_publisher(Twist, 'cmd_vel', 10)self.timer = self.create_timer(0.1, self.move_robot)def move_robot(self):msg = Twist()msg.linear.x = 0.2 # 前进速度0.2 m/smsg.angular.z = 0.0 # 不转向self.publisher_.publish(msg)def main(args=None):rclpy.init(args=args)robot_controller = RobotController()rclpy.spin(robot_controller)robot_controller.destroy_node()rclpy.shutdown()if __name__ == '__main__':main()总结与展望
通过本文对利用 Python 编写 ROS2 应用的介绍,可以看到 Python 在 ROS2 开发中展现出了强大的功能和便捷性。从基础的节点创建、话题与服务通信,到实际的机器人导航应用案例,Python 为 ROS2 开发者提供了高效的开发手段。随着机器人技术的不断发展,ROS2 和 Python 的结合将在更多领域发挥重要作用,如工业自动化、智能家居、医疗机器人等。未来,我们可以期待基于 Python 的 ROS2 应用在功能和性能上不断提升,为机器人产业的发展注入新的活力。