多光谱相机与高光谱相机的区别
多光谱相机与高光谱相机均属于光谱成像设备,但两者在光谱分辨率、波段数量、数据维度及应用场景上存在显著差异。以下是详细的对比分析:
一、核心差异对比
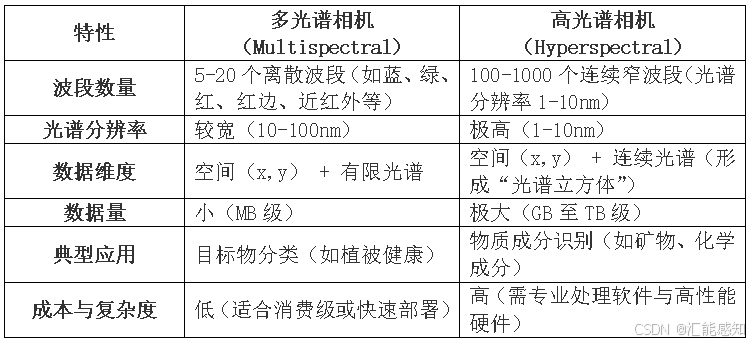
二、工作原理差异
多光谱相机
波段选择:根据目标物特性预设特定波段(如叶绿素敏感的红边波段720nm)。
成像方式:
滤光片切换:通过滤光轮(Filter Wheel)或可调滤光片(LCTF)逐波段成像。
多传感器并行:分光棱镜将光线分至不同传感器(如MicaSense RedEdge-MX)。
高光谱相机
连续光谱覆盖:通过色散元件(光栅、棱镜)或干涉仪获取连续光谱信息。
成像方式:
推扫式(Push-broom):逐行扫描,适用于静态场景(如机载遥感)。
快照式(Snapshot):单次曝光获取全光谱(如医疗内窥镜)。
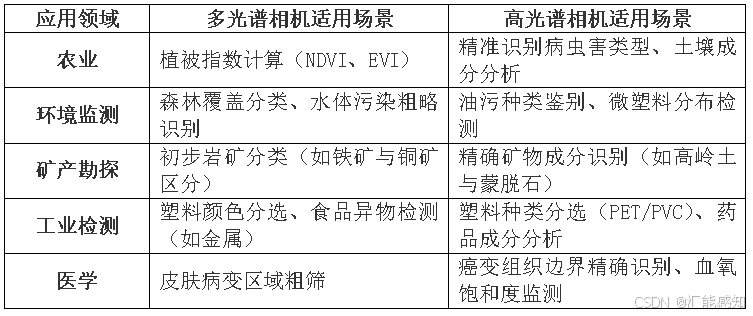
三、典型应用场景对比
四、优缺点对比
多光谱相机
优点:
数据量小,处理速度快(适合实时监测)。
成本低,易集成(如无人机搭载)。
缺点:
无法获取连续光谱,可能漏检未知物质。
波段选择依赖先验知识(设计时需明确目标)。
高光谱相机
优点:
光谱信息完整,可识别化学成分与细微差异。
支持未知物质发现(如地质勘探中的新矿物)。
缺点:
数据冗余度高,需降维处理(如PCA、波段选择)。
硬件成本高,对计算资源要求苛刻。
五、选型建议
选择多光谱相机:
目标明确且波段需求少(如仅需NDVI)。
预算有限或需轻量化部署(如消费级无人机)。
选择高光谱相机:
需物质成分的精细分析(如矿物、化学品)。
科研或工业场景(如制药QC、遥感测绘)。
选择汇能感知光谱相机:

👇点击以下名片,获取更多产品资料👇
欢迎咨询,欢迎交流