当前位置: 首页 > news >正文 自动驾驶技术-相机_IMU时空标定 news 2025/10/20 6:33:59 自动驾驶技术-相机_IMU时空标定 时间延迟 时间延迟 参考链接1、2 相机主要分为全局和卷帘快门相机,从触发到成像的过程包括:复位时间、AE()曝光时间、读出时间 全局快门如下图所示 卷帘快门如下图所示 相机录制视频时,为了保持固定频率,在曝光时间之前会添加延迟时,间延迟时长不定。 两者优缺点如下: 查看全文 http://www.dtcms.com/a/128855.html 相关文章: NI的LABVIEW工具安装及卸载步骤说明 博途 TIA Portal之1200做主站与有意思的板子做MODBUS_RTU通讯 【多模态大模型实战】使用LoRA微调Qwen2.5-VL ESP32+Arduino入门(三):连接WIFI获取当前时间 埃隆·马斯克与开源:通过协作重塑创新 Python 中 `__init__` 方法的深入解析 Java工具类-assert断言 嵌入式人工智能应用-第三章 opencv操作3 图像平滑操作 下 Linux 内存调优之系统内存全面监控 教程:在Typora中显示拼音——附处理工具 学术版 GPT 网页 电商用户购物行为分析:基于K-Means聚类与分类验证的完整流程 Linux dmesg 命令详解 深入理解 v-for 指令及其使用方法 AI绘制流程图 【数据结构】之二叉树 《嵌套调用与链式访问:C语言中的函数调用技巧》 关于Genspark.ai的使用体验 Linux基础4 SMT贴片组装工艺优化与高效生产 【说明书#1】Node.js 和 npm安装与使用 波束形成(BF)从算法仿真到工程源码实现-第五节-线性约束最小方差波束形成算法(LCMV) 3DMAX建筑可视化插件RetailStore零售商店生成器安装及使用方法详解 基于MCP-Client实现Manus思路扩展 和Demo设计 重构艺术 | 内联与查询替代临时变量 格式工厂 v5.18最新免安装绿色便携版 pgsql:关联查询union(并集)、except(差集)、intersect(交集) Linux基础14 ASP.NET Core 性能优化:内存缓存 3.1多状态专题:LeetCode面试题17.16 按摩师
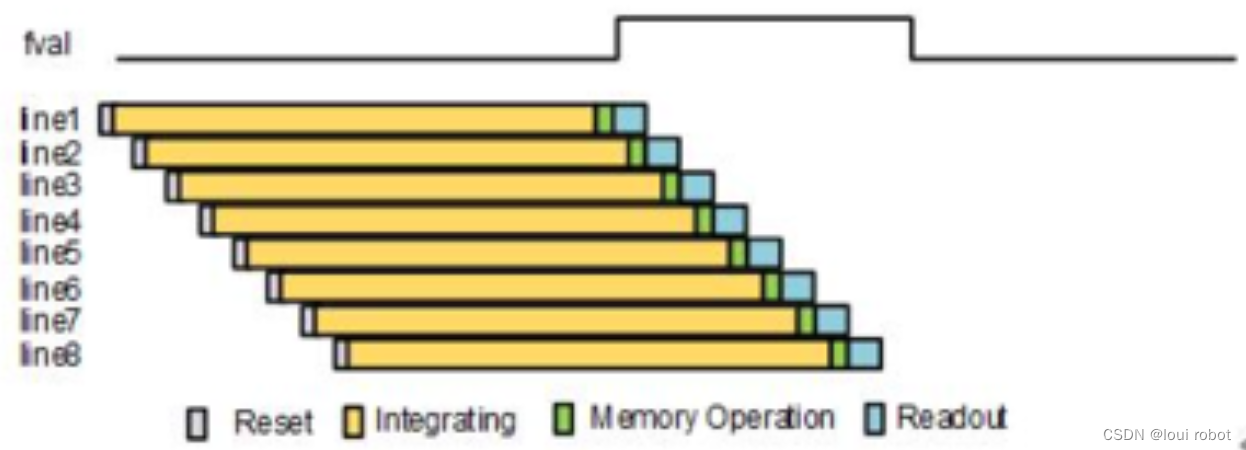
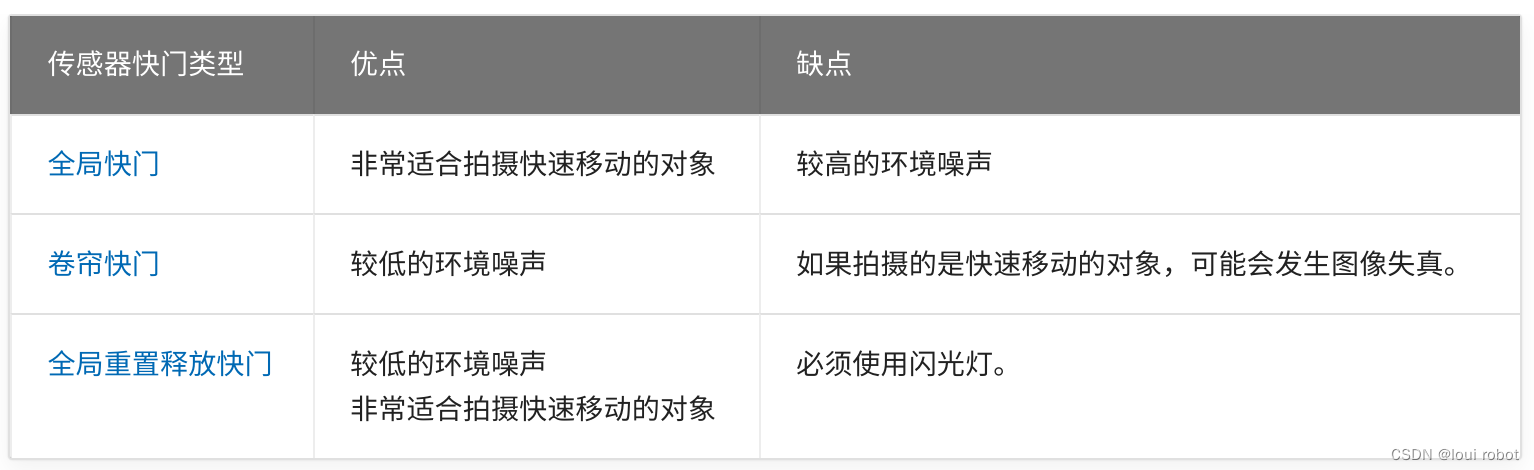
自动驾驶技术-相机_IMU时空标定 时间延迟 时间延迟 参考链接1、2 相机主要分为全局和卷帘快门相机,从触发到成像的过程包括:复位时间、AE()曝光时间、读出时间 全局快门如下图所示 卷帘快门如下图所示 相机录制视频时,为了保持固定频率,在曝光时间之前会添加延迟时,间延迟时长不定。 两者优缺点如下: 查看全文 http://www.dtcms.com/a/128855.html 相关文章: NI的LABVIEW工具安装及卸载步骤说明 博途 TIA Portal之1200做主站与有意思的板子做MODBUS_RTU通讯 【多模态大模型实战】使用LoRA微调Qwen2.5-VL ESP32+Arduino入门(三):连接WIFI获取当前时间 埃隆·马斯克与开源:通过协作重塑创新 Python 中 `__init__` 方法的深入解析 Java工具类-assert断言 嵌入式人工智能应用-第三章 opencv操作3 图像平滑操作 下 Linux 内存调优之系统内存全面监控 教程:在Typora中显示拼音——附处理工具 学术版 GPT 网页 电商用户购物行为分析:基于K-Means聚类与分类验证的完整流程 Linux dmesg 命令详解 深入理解 v-for 指令及其使用方法 AI绘制流程图 【数据结构】之二叉树 《嵌套调用与链式访问:C语言中的函数调用技巧》 关于Genspark.ai的使用体验 Linux基础4 SMT贴片组装工艺优化与高效生产 【说明书#1】Node.js 和 npm安装与使用 波束形成(BF)从算法仿真到工程源码实现-第五节-线性约束最小方差波束形成算法(LCMV) 3DMAX建筑可视化插件RetailStore零售商店生成器安装及使用方法详解 基于MCP-Client实现Manus思路扩展 和Demo设计 重构艺术 | 内联与查询替代临时变量 格式工厂 v5.18最新免安装绿色便携版 pgsql:关联查询union(并集)、except(差集)、intersect(交集) Linux基础14 ASP.NET Core 性能优化:内存缓存 3.1多状态专题:LeetCode面试题17.16 按摩师