高精地图地图匹配定位算法(二)
高精地图地图匹配定位算法(二)
- 一、 方案
- 二、总结
- 三、参考文献
一、 方案
结合新的地图匹配方面论文,进一步完善《高精地图地图匹配定位算法》。
-
Point-Line(PL) ICP
文献1所提点-线ICP步骤与ICP步骤一样,使用迭代点-线距离方法计算两帧点云相对位姿,文献1中根据目标点云和相对位姿初值查找与之最近的源点云中2个点,然后最小化点-线距离优化两帧点云相对位姿:
![[Image]](https://i-blog.csdnimg.cn/blog_migrate/9088c44b8b9bb70920929392531c1c1e.png)
式中,n_i为线的法向量
-
Point-Plane ICP
文献2所提点-面ICP骤与ICP步骤一样,使用迭代点-面距离方法计算两帧点云相对位姿,文献1中根据目标点云和相对位姿初值查找与之最近的源点云中2个点,然后最小化点-面距离优化两帧点云相对位姿:

式中,n_i为面的法向量 -
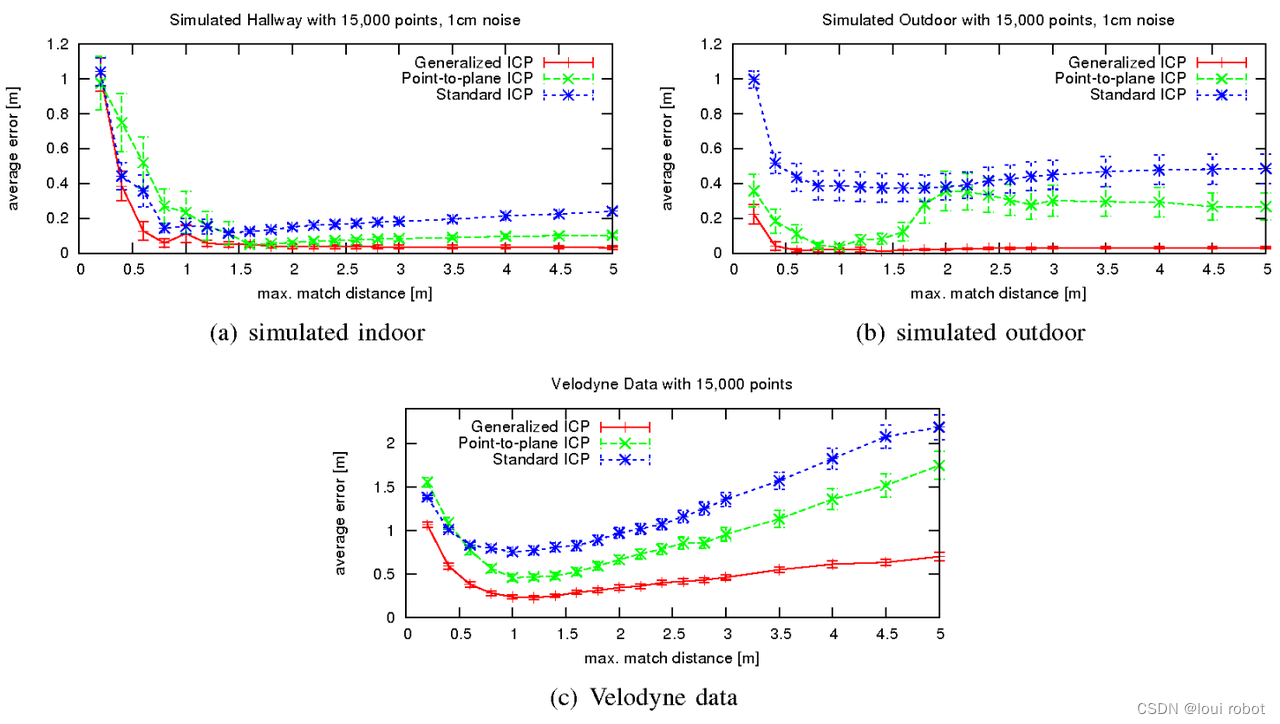
GICP
文献3所提GICP根据最近点匹配,目标点云和源点云对应的点a_i和b_i,根据点周围点(20个)计算点的分布,使用其均值和方差C构成高斯分布,两个分布之间的距离概率分布如下:

最大化距离概率分布,可求得相对位姿T:


-
当方差满足如下条件时,该方法与点-点ICP一样
-
当方差满足如下条件时,该方法与点-面ICP一样
-
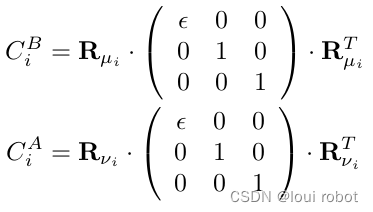
当方差满足如下条件时,该方法与面-面ICP一样:这里对方差进行SVD分解,最大两个特征值取1,最小特征值取一个较小的数,这样使得迭代优化时,梯度主要沿面的法向量方向
从实验结果来看,GICP结果明显优于点-点和点-面ICP方法
- VGICP
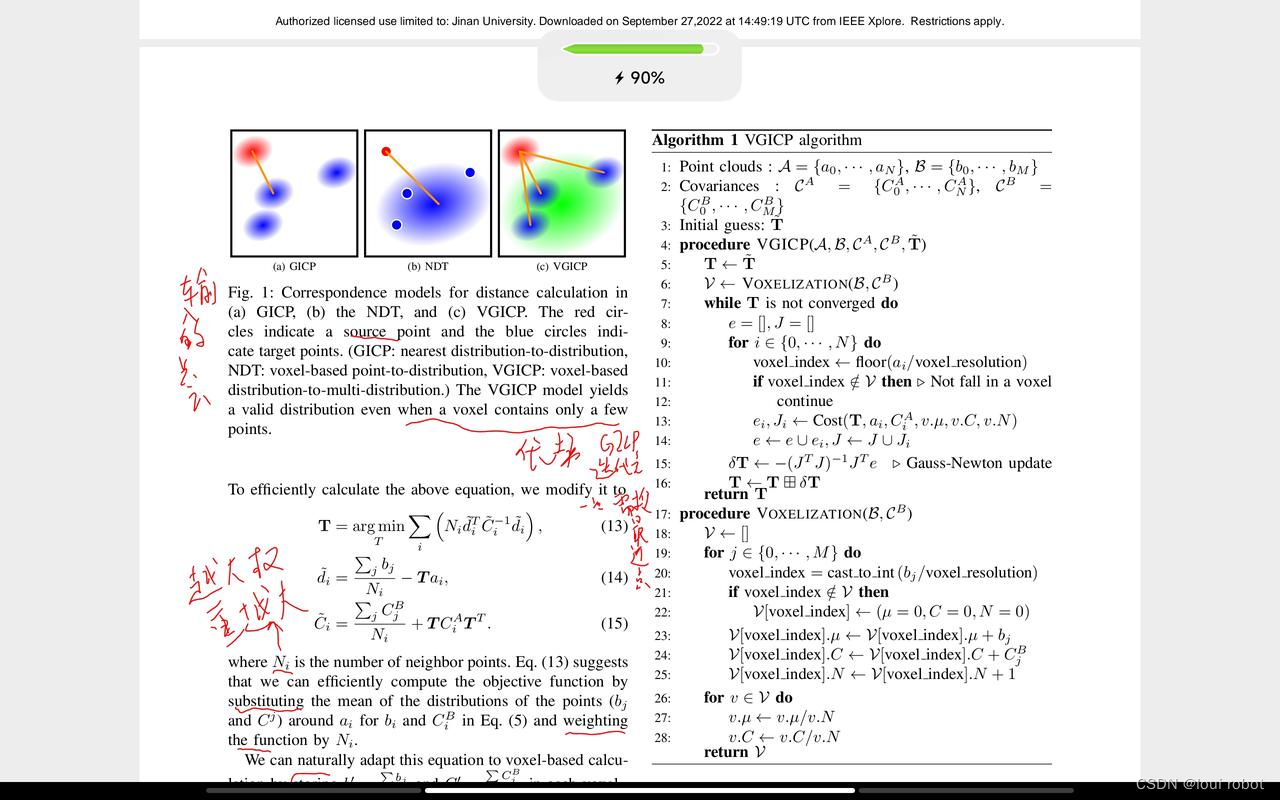
文献3所提VGICP计算源点云a_i与目标点云中半径r内多个点b_j的距离,通过同时计算局部的多个点,能达到平滑局部特征的作用。
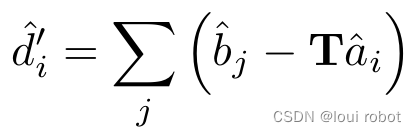
最小化距离计算相对位姿:
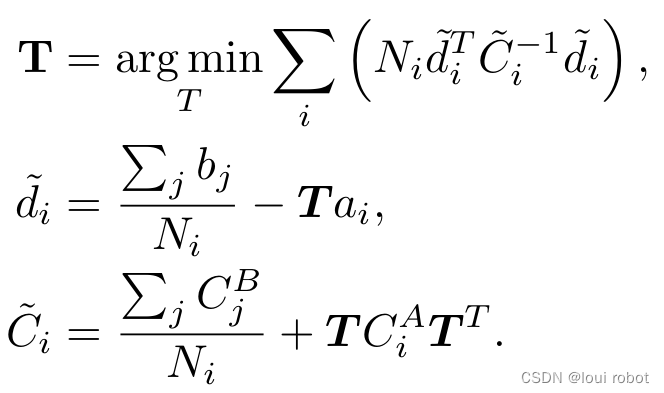
算法步骤如下,在一次优化中,只需要对目标点云b_j进行一次体素化,计算其均值和方差,在迭代优化过程中不需要使用KD树进行最近点匹配:
- Fast-LIO2
文献4所提Fast-LIO使用迭代EKF估计点云帧的位姿,IMU积分预测点云帧位姿,使用点-面ICP更新点云帧位姿,观测方程如下式。

式中,u_j为地图中与点p_j相邻多个(5个)点组成面的法向量,q_j为面的中心点。
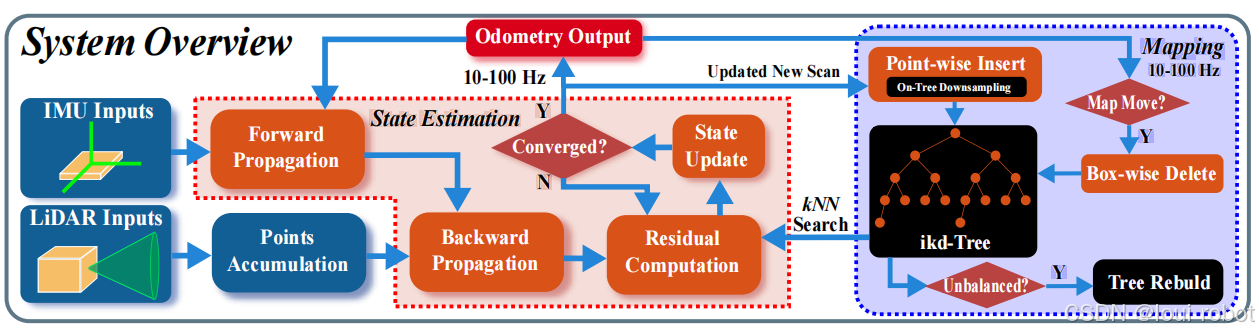
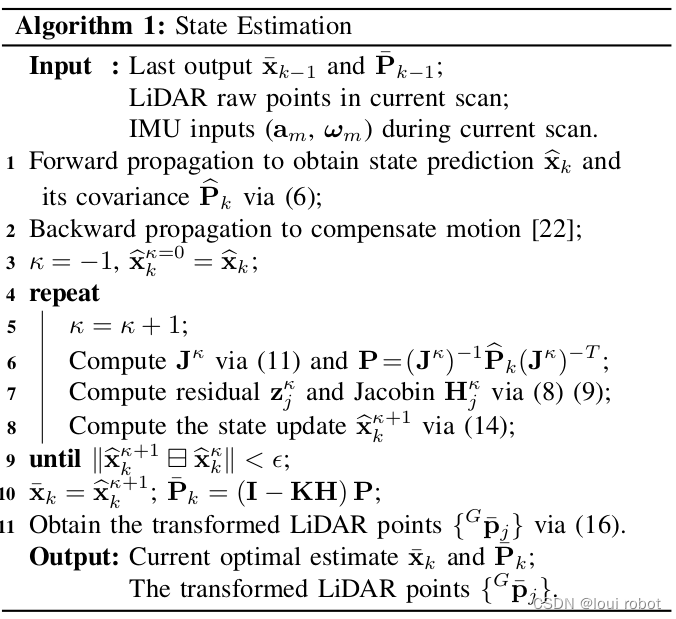
该论文使用Ikd树[5]表示局部地图,相对KD树插入、删除更快,迭代EKF的步骤如下:
该论文团队相关论文Fast-LIO[6]和R3LIVE[7]-[9]系列点云匹配时,也是使用点-线或点-面ICP,以及IMU位姿相对约束
以ouster64线为例
1)standard_pcl_cbk:提取特征点加入lidar_buffer、时间加入time_buffer
Preprocess::oust64_handler:对点云进行预处理,固定间隔降采样或提取面特征点
2)imu_cbk-:IMU数据加入imu_buffer
3)sync_packages:获取lidar_buffer第1帧数据
4)ImuProcess::Process:
ImuProcess::IMU_init:静止初始化init_state,计算初始重力向量grav、角速度偏置bg,但初始位姿没有对齐重力向量
UndistortPcl:IMU预测及点云运动补偿
5)体素滤波降采样及初始化ikdtree
6)update_iterated_dyn_share_modified:更新状态,
h_share_model:h_dyn_share(x_, dyn_share)获取ikdtre降采样点的最近邻点,计算H_x
更新
7)map_incremental:将降采样点加入ikdtree地图
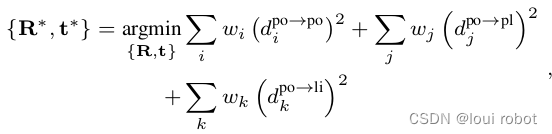
- MULLS
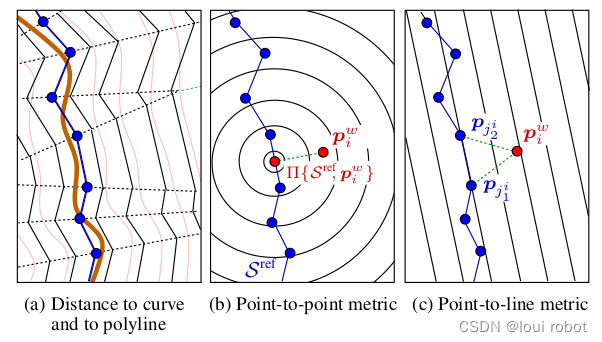
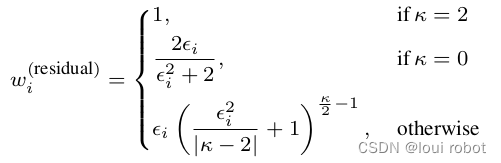
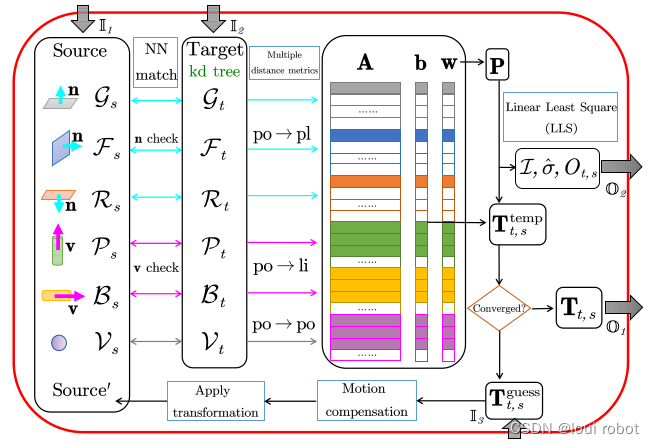
文献10所提MULLS提取特征流程如左图,首先进行降采样和运动补偿,然后提取地面,再从非地面点提取点、线、面特征,并将线面特征分为与地面平行和垂直的线面,其中,点线面特征根据点及其周围K个点的计算,公式如下式。



![[Image]](https://i-blog.csdnimg.cn/blog_migrate/a562e7d7588217f4642d92ef6990a523.png)
点云匹配时,根据两帧点云点的属性构建点-点、点-线或点-面约束,如下图所示, 所有点构建的目标方程如下式,其中权重根据特征之间类别、距离和强度计算:


二、总结
三、参考文献
- An ICP variant using a point-to-line metric
- Generalized-ICP
- Voxelized GICP for Fast and Accurate 3D Point Cloud Registration
- FAST-LIO2: Fast Direct LiDAR-inertial Odometry
- ikd-Tree: An Incremental K-D Tree for Robotic Applications
- FAST-LIO: A Fast, Robust LiDAR-inertial Odometry Package by Tightly-Coupled Iterated Kalman Filter
- R3LIVE++: A Robust, Real-time, Radiance reconstruction package with a tightly-coupled LiDAR-Inertial-Visual state Estimator
- R3LIVE: A Robust, Real-time, RGB-colored, LiDAR-Inertial-Visual tightly-coupled state Estimation and mapping package
- R2LIVE: A Robust, Real-time, LiDAR-Inertial-Visual tightly-coupled state Estimator and mapping
- MULLS: Versatile LiDAR SLAM via Multi-metric Linear Least Square