Matlab 汽车ABS的bangbang控制和模糊PID控制
1、内容简介
Matlab 197-汽车ABS的bangbang控制和模糊PID控制
可以交流、咨询、答疑
2、内容说明
略
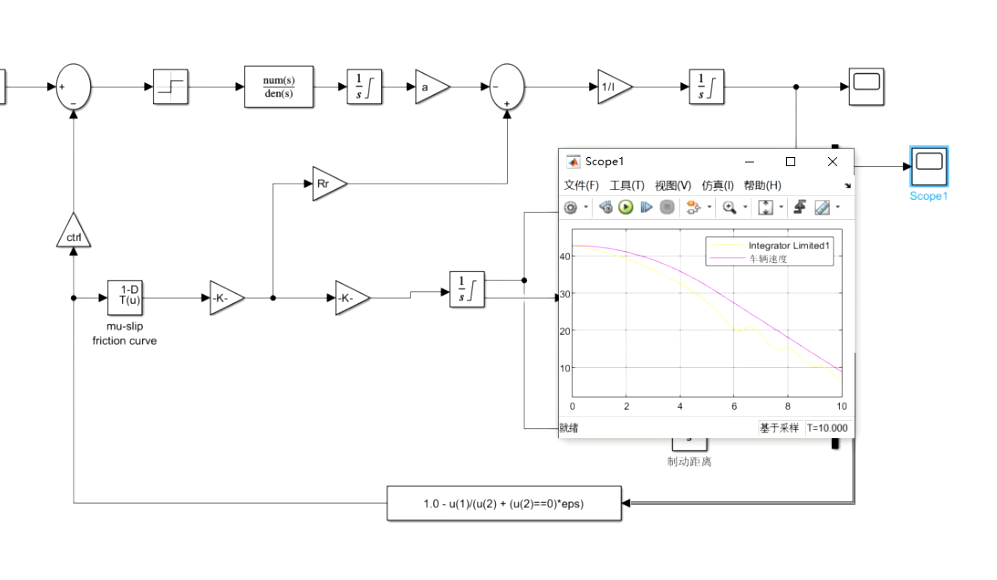
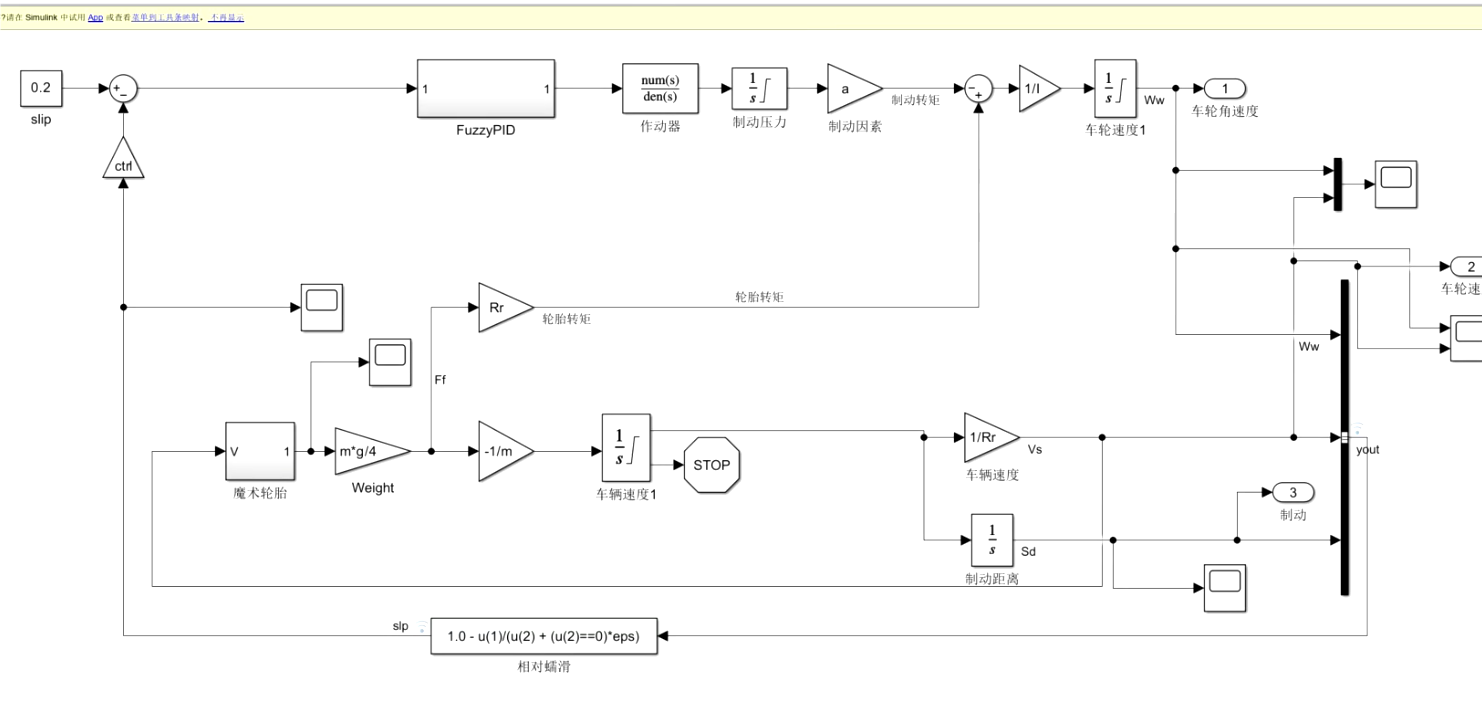
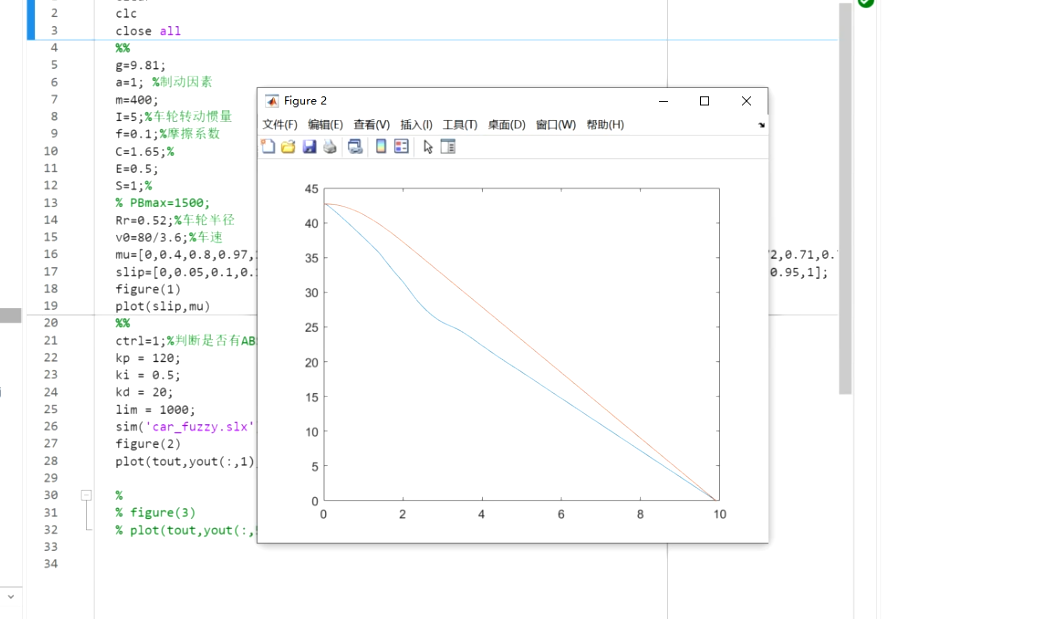
摘要:本文旨在设计一种利用模糊控制理论优化的pid控制器,控制abs系统,达到对滑移率最佳控制范围的要求 ,所提出的方案采用级联控制架构:设计用于外环中的车轮打滑控制的具有Takagi-Sugeno-Kang模糊推理系统的PID型模糊控制器,而在内循环中采用制动压力PID控制器, 还开发了采用补充过滤器的车轮滑移估计解决方案。 ABS的效果与实用性是根据汽车动力学原理进行全车模型来评估的。这个模型根据可靠的实验数据和汽车系统动力学的制动与轮胎摩擦模型相结合,进行直线制动模拟,并根据不同和可变条件对制动效率进行评估。提出以滑移率为控制目标地ABS系统的控制与仿真分析,将PID控制器应用于单个ABS系统控制研究,以车轮滑移率为我们的控制目标,通过轮速和车速传感器采集汽车的速度、车轮转速,计算出汽车各个轮胎实际滑移率,与期望滑移率进行对比后,将两者的偏差作为PID控制器的输入量,反复调节控制器控制参数,使其实际滑移率始终保持在最佳滑移率附近,通过PID控制最终让汽车在最佳滑移率所对应的地面制动力下进行制动。从而得出ABS的最佳工作状态,提高驾驶的舒适性和安全性。
关键词:防抱死制动系统(ABS);模糊控制器;PID控制器;轮滑估计;车型轮胎模型
3、仿真分析
略
4、参考论文
略