KTH5772 系列游戏手柄摇杆专用3D 霍尔位置传感器
产品概述
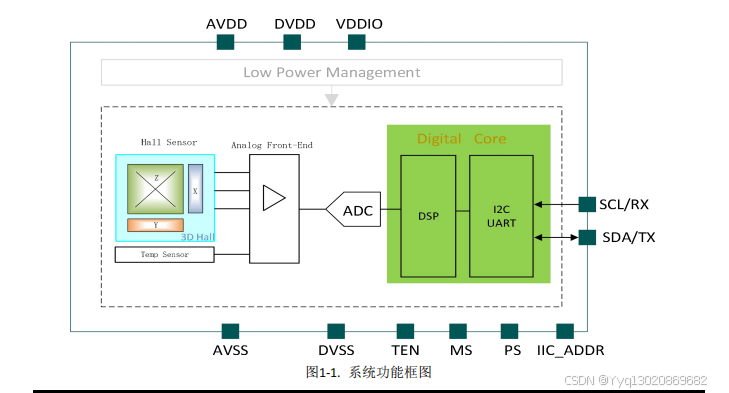
KTH5772是一款专为游戏手柄上的摇杆应用而设计的3D霍尔磁感应芯片,主要面向对线性度、回报率、灵敏度、功耗要求严格的摇杆应用。KTH5772基于3D霍尔技术,内部分别集成了X轴、Y轴和Z轴三个独立的霍尔元件,能够通过测量和处理磁通密度矢量的三个空间分量(即Bx、By和Bz)来感知其周围任何移动的磁铁。信号链采用高精度运放通过16bit ADC将模拟信号转换后,提供给内置的高性能DSP模块进行进一步数据处理。内部集成了摇杆中心和外圈校正算法,配合可编程参数,可大大提高摇杆出厂一致性和降低测试成本。与基于传统线性霍尔传感器的摇杆或碳膜摇杆相比,3D霍尔摇杆存在如下优点:
技术亮点:
创新磁夹角解算算法:KTH5772搭载先进的3D霍尔摇杆技术,超越了传统双线性霍尔传感器的线映射局限。KTH5772芯片内配有由X、Y、Z三轴磁场参与计算的摇杆专用的算法,可以简单近似理解为磁场X、Y、Z比值分析并执行ATAN变换从而实现了摇杆位置的高精度计算。此创新不仅精度飞跃,还内嵌自适应机制,有效对抗由外部因素(如间隙、温度波动或老化)导致的磁通密度波动,保障了长期使用的稳定与精确。
用户体验提升:
精准操控轨迹还原:普通霍尔摇杆是使用两颗磁铁搭配两颗线性霍尔的组成的,使用两颗线性霍元件分
别检测X和Y轴的摇杆动作,其工作原理基于摇杆磁铁在两个独立平面上的直线位移。其每个线性霍尔元件仅负
责一个维度的测量,而且是基于机械结构上的固定点来检测位移。由于机械结构和安装的限制,以及线性霍尔元件本身对非线性位移的敏感性,当摇杆在平面上做环形运动时,两个轴的线性位移并非完全独立而且会受到相互影响,导致在某些位置上出现非线性的误差积累。特别是在摇杆从一个轴的最大偏移快速过渡到另一个轴时,由于缺乏第三个维度(Z轴)的信息来校正偏移,偶发会出现所谓的“死区”或非线性区域,从而得画出的轨迹偏离理想圆形,显得更像方形或多边形,尤其是在快速或大幅度移动时更为明显,并且双线性霍尔依赖磁场的绝对强度,因此考虑磁铁的公差和线性灵敏度以及装配的公差后出厂后的产品一致性较差,此外双线性霍尔在斜对角时磁场最弱容易受到干扰:3D霍尔摇杆通过一颗磁铁和一颗芯片实现了真实的轨迹复现独立控制的磁体设计,在摇杆任何一个圆形轨迹上磁场向量之和保持不变,使得摇杆的运动轨迹与操作者的实际意图完美匹配,呈现出更加自然流畅的圆形轨迹。这极大增强了游戏和专业应用中的沉浸感与控制精度。
性能优化:
斜对角噪声抑制与漂移解决方案:针对双线性霍尔摇杆在斜向操作时易产生的高噪声问题,3D霍尔摇杆设计显著降低了此类噪声干扰,同时解决了碳膜摇杆常有的漂移难题,确保了在各种操作方向上的稳定输出,提升了整体操作体验的顺畅度;与传统模拟输出方式的摇杆相比,KTH5772内部集成的16位ADC直接将模拟信号数字化传输至MCU,绕过了模拟输出摇杆需要外加的采样、滤波等复杂步骤,与模拟摇杆相比其不仅提升了4bit以上的有效分辨率,还显著减轻了MCU的计算负担也避免了模拟摇杆需要的单端ADC采样引入的电源、地、射频等噪声干扰问题,保证了信号的纯净与处理效率。
环境适应与制造容错:
热稳定性与高线性度:凭借先进的磁场处理逻辑,3D霍尔摇杆在不同的温度条件下均能保持卓越的热稳定性,确保了热精度不受影响。此外,即便面临制造过程中常见的误差(如霍尔元件与磁体安装的微小偏差以及磁铁随温度变化造成磁场强度的变化),该摇杆仍能展现出高水准的线性性能,确保每一次操作的反馈都精准无误:此外3D霍尔摇杆的磁铁和芯片均处于摇杆中心位置可以有效的减小外部扳机键的磁场干扰问题。因此KTH5772这颗3D霍尔摇杆以其独特算法、真实轨迹追踪、卓越的抗噪能力及广泛的环境适应性,全新一代摇杆技术为游戏、虚拟现实等领域带来了前所未有的操作体验和控制精度。
KTH5772集成多种工作模式,平均功耗低至2.4uA的睡眠模式,回报率超1KHz的快速测量模式输出有效超4096个数据,为用户在高回报率和低功耗之间提供选择灵活性。KTH5772处理后的位置信息可以通过多种接口形式输出给主控,可支持数字接口UART/IIC,其接口可与传统碳膜摇杆和霍尔摇杆兼容,仅需将MCU的AD接口设置为普通IO即可以大大的提高了新产品开发的效率。
主要特性
绝对3D位置检测
磁路设计简单
温度偏移补偿
集成摇杆中点和外圈多点校准算法
集成抗按压算法
快速测量模式,数据回报率可配置,最高超过1KHz
睡眠模式2.4uA
支持UART通信,波特率可编程设置
支持IIC通信,快速模式400KHz
工作电压 2.8V~5.5V
工作温度-40~+85℃
典型应用
游戏摇杆