永磁同步电机无速度算法--基于HOPLL的滑模观测器
一、原理介绍
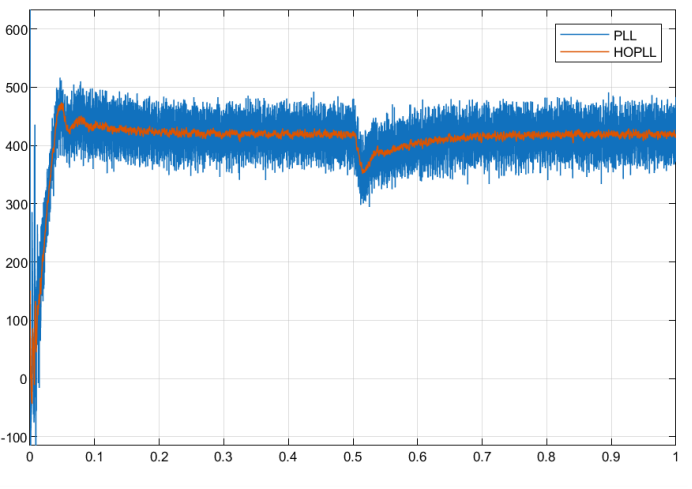
传统PLL算法为二阶系统,其实现是基于转速变化变化缓慢的假设,因此在转速频繁出现动态变化时会导致动态性能不佳。为改善系统动态性能,将转速微分量引入PLL中,作为附加状态变量,与电角速度及转速共同构成HOPLL的状态变量。
滑模观测器采用反正切+HOPLL的结构。
二、仿真模型
在MATLAB/simulink里面验证所提算法,搭建仿真。采用和实验中一致的控制周期1e-4,电机部分计算周期为1e-6。仿真模型如下所示:
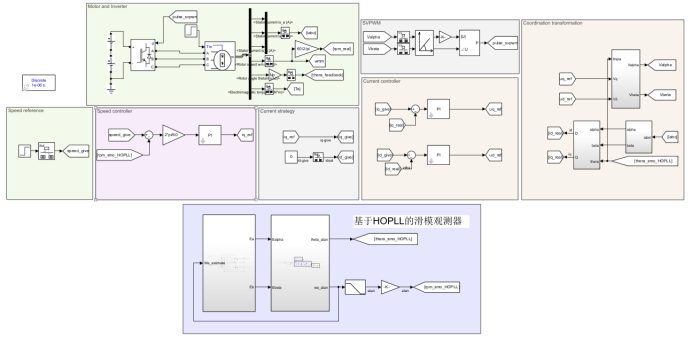
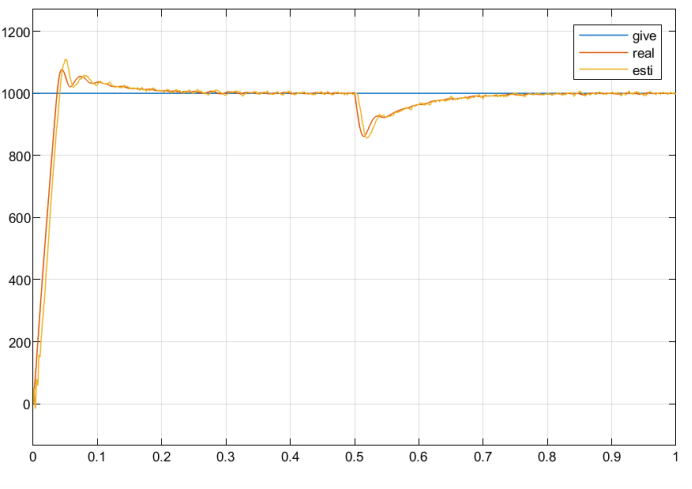
仿真工况:电机空载零速启动,0s阶跃给定转速1000rpm,0.5s施加额定负载
2.1给定转速、实际转速和估计转速
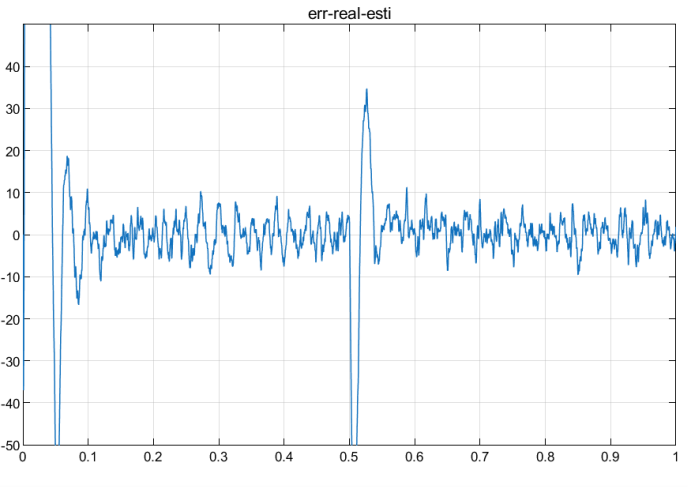
2.2估计转速与实际转速误差
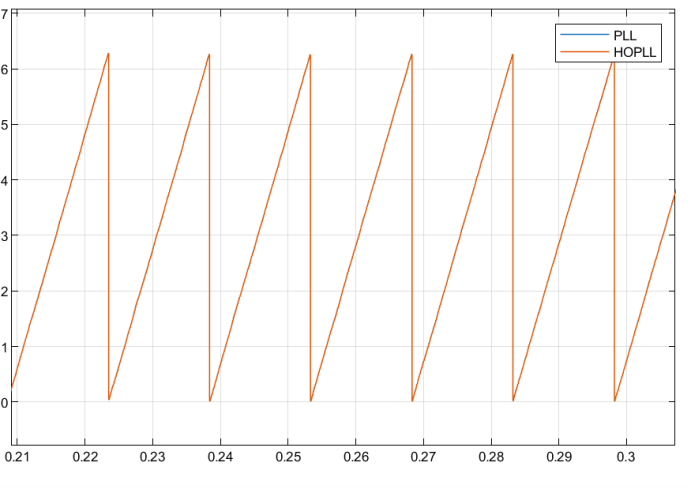
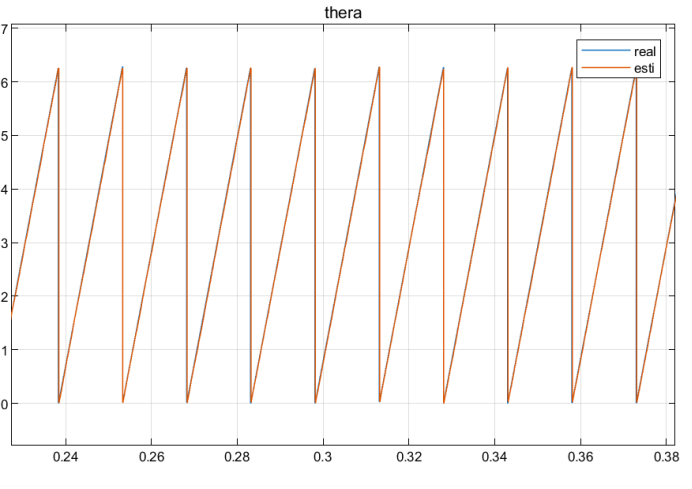
2.3估计转角与实际转角
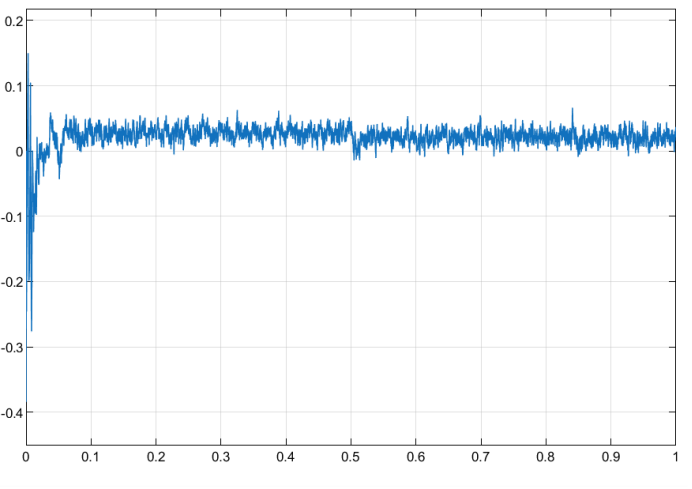
2.4估计转角与实际转角误差
2.5 PLL与HOPLL比较
电角速度
 电角度
电角度