Workbench运动副与dyna对应关系(一)
引言
Introduction
Workbench中dyna模块的设置会转换为相应的关键字的设置,生成k文件之后使用dyna的求解器进行计算,因此了解workbench中一些操作设置对应的dyna关键字的相关设置对dyna的学习很有帮助。
01
固定副
Workbench中固定副设置如图 1所示。
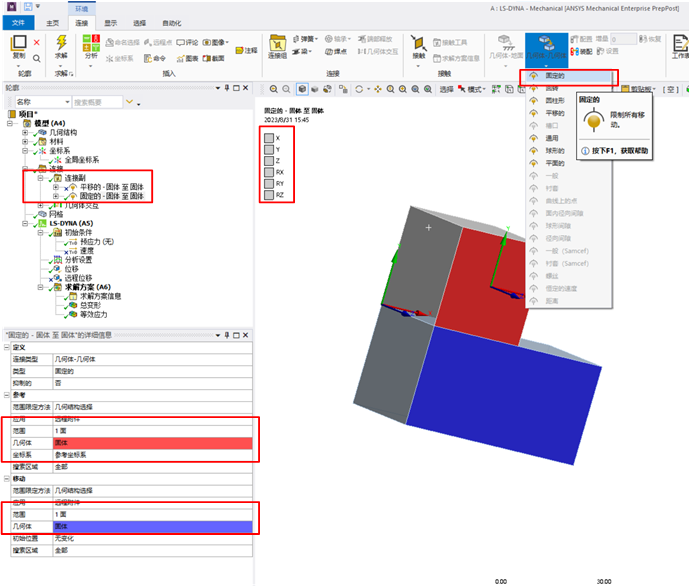
图 1 workbench中固定副设置
选择连接中的固定副,选择参考面和移动面,所有自由度均被约束。
Dyna中固定副设置如图 2所示。
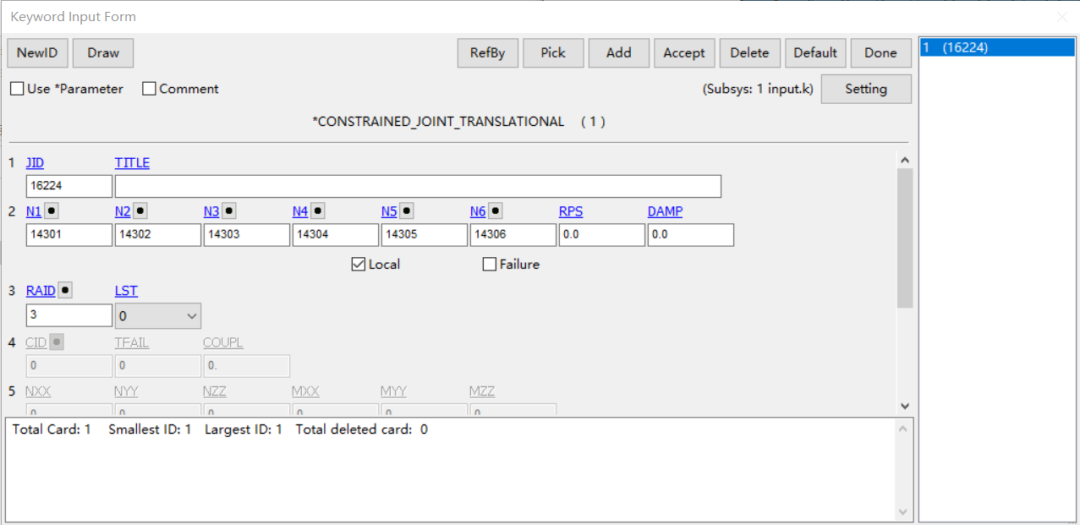
图 2 Dyna中固定副设置
需要设置六个点,其中N1、N3和N5与一个部件耦合,N2、N4和N6与一个部件耦合,N1、N3和N5与N2、N4和N6重合,所有自由度均被约束。
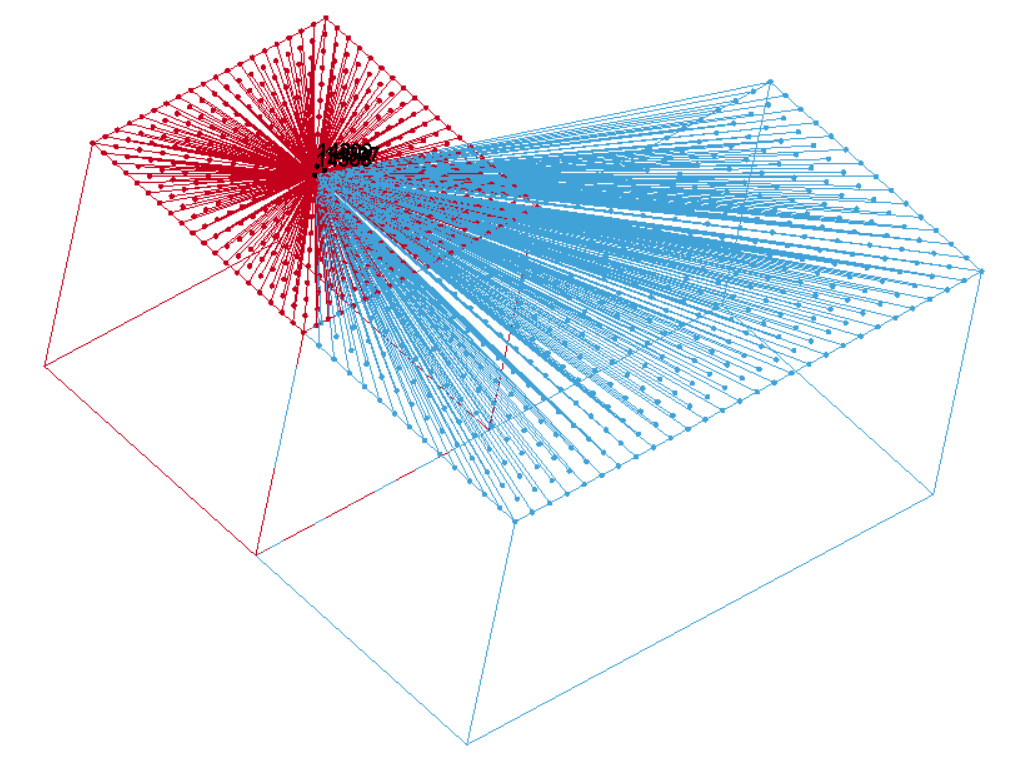
图 3 Dyna中固定副点的示意
02
回转副
Workbench中回转副设置如图 4所示。
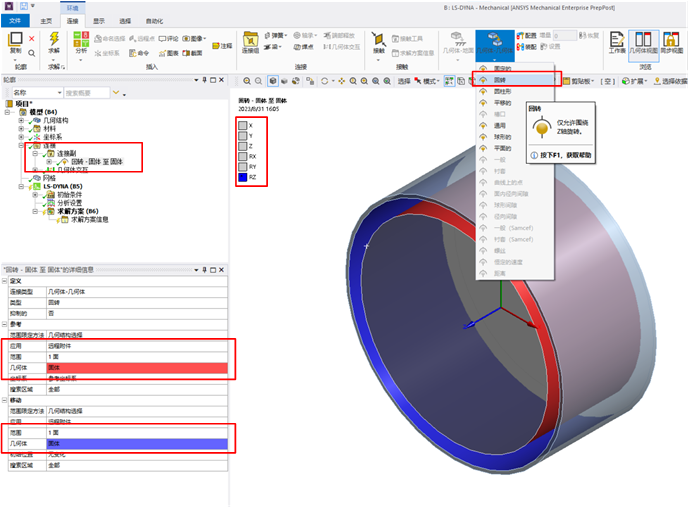
图 4 workbench中回转副设置
选择连接中的回转副,选择参考面和移动面,根据参考面自动生成坐标系,将坐标系的z方向转动自由度释放,其余自由度约束。
Dyna中回转副设置如图 5所示。
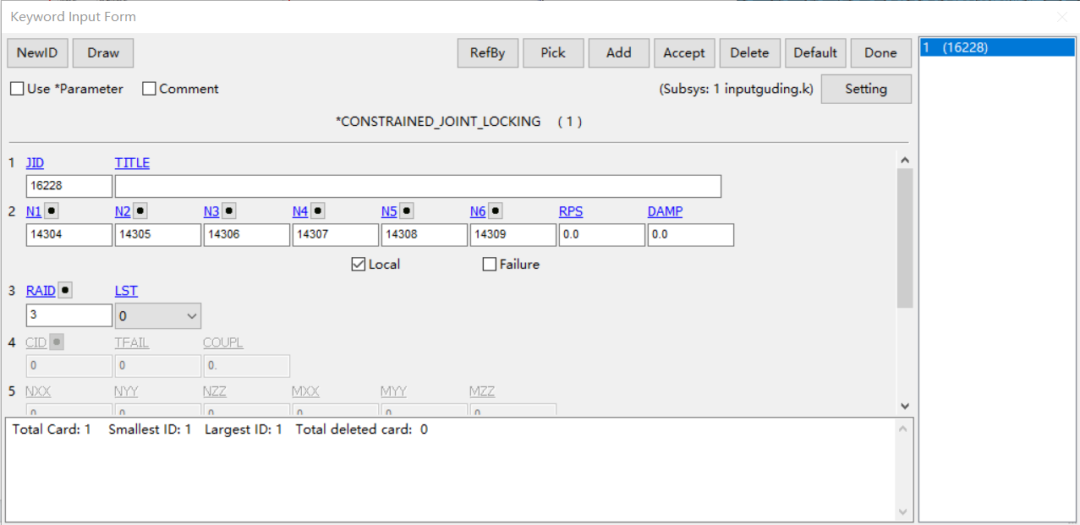
图 5 Dyan中回转副设置
必须设置四个点,其中N1、N3与一个部件耦合,N2、N4与一个部件耦合,N1、N3与N2、N4重合,其中N1、N3的连线方向的转动自由度被释放,其余自由度被约束。
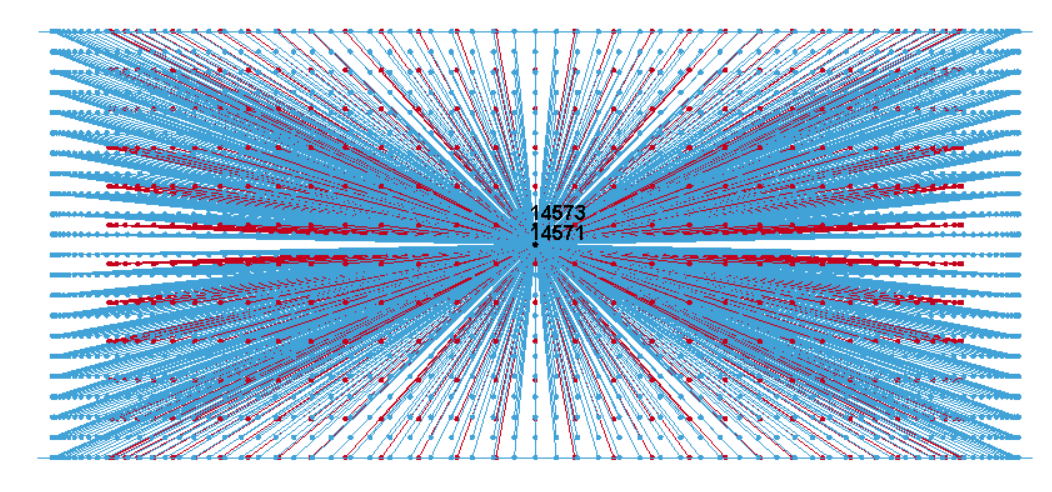
图 6 Dyna中回转副点的示意
03
圆柱副
Workbench中圆柱副设置如图 7所示。
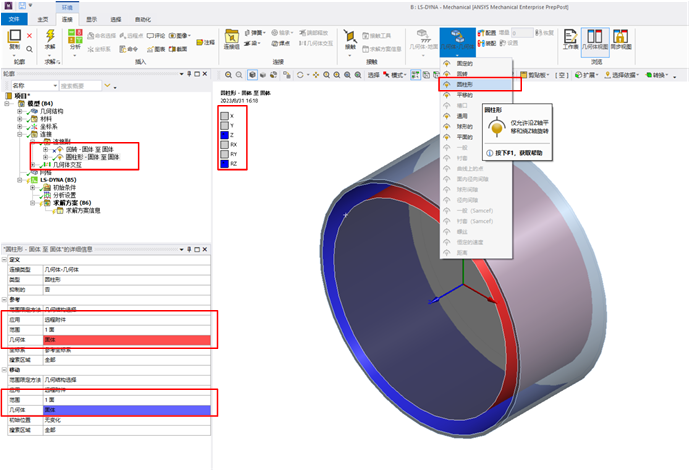
图 7 workbench中圆柱副设置
选择连接中的圆柱副,选择参考面和移动面,根据参考面自动生成坐标系,将坐标系的z方向转动自由度和平动自由度释放,其余自由度约束。
Dyna中圆柱副设置如图 8所示。
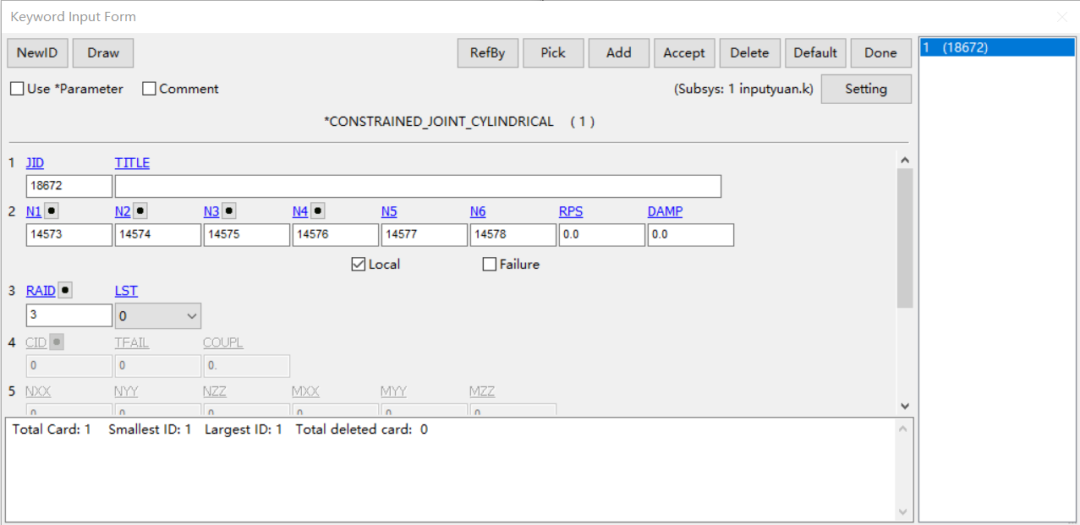
图 8 Dyan中圆柱副设置
必须设置四个点,与回转副类似,N1、N3与一个部件耦合,N2、N4与一个部件耦合,N1、N3与N2、N4重合,其中N1、N3的连线方向的转动自由度和平动自由度被释放,其余自由度被约束。
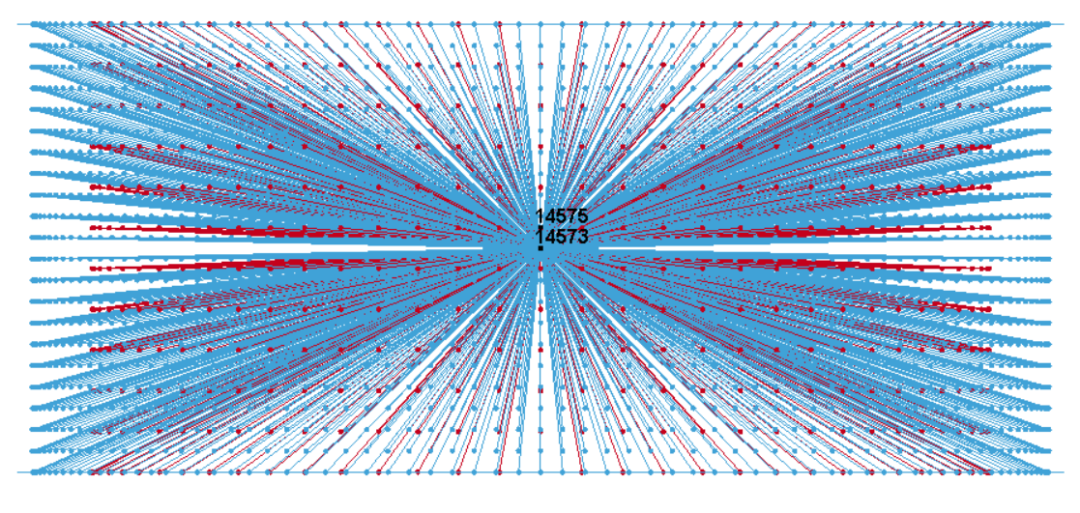
图 9 Dyna中圆柱副点的示意
04
平移副
Workbench中平移副设置如图 10所示。
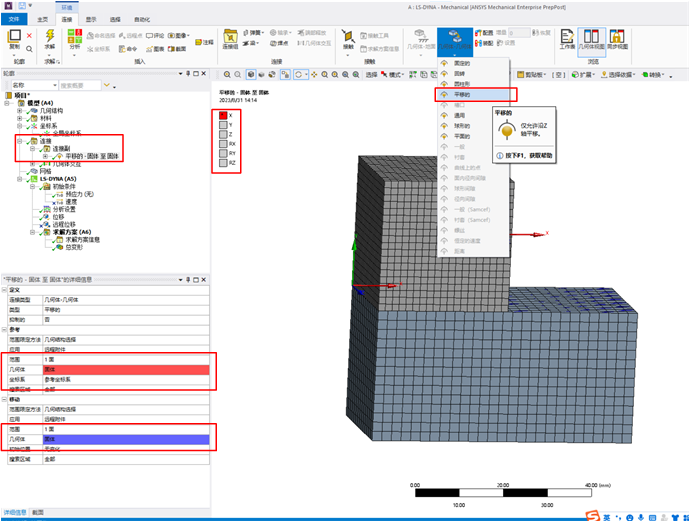
图 10 workbench中平移副设置
选择连接中的平移副,选择参考面和移动面,根据参考面自动生成坐标系,将坐标系的x方向平动自由度释放,其余自由度约束。
Dyna中平移副设置如图 11所示。
图 11 Dyan中平移副设置
其中N1、N3和N5与一个部件耦合,N2、N4和N6与一个部件耦合,N1、N3和N5与N2、N4和N6重合,其中N1、N3的连线方向的自由度被释放,其余自由度被约束。N1和N3的连线与N3和N5的连线保持垂直。
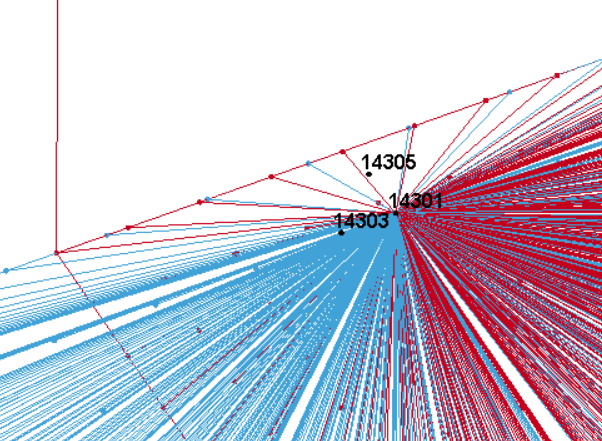
图 12 Dyna中平移副点的示意
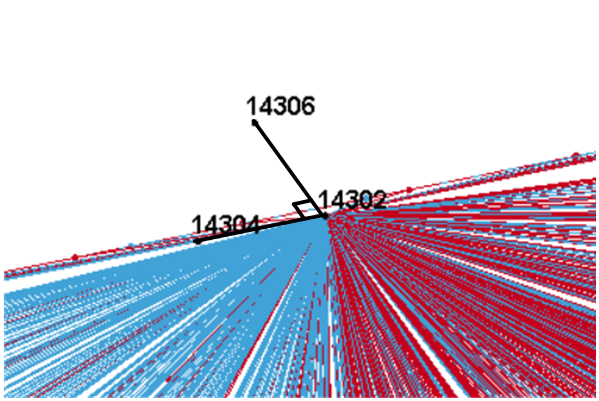
图 13 垂直示意图