武汉微信网站建设如何快速推广
ROS2_control 对机器人控制
- 安装与介绍
- 安装
- 介绍
- 使用
- gz 中写法
- .yaml文件中写法
- type: joint_state_broadcaster/JointStateBroadcaster的来源
- 命令接口关节控制
- command_interface
- transmission
- CMakelist.txt与package.xml文件
- gz_ros2_control与自定义插件
- 例子描述
- 自定义插件使用
安装与介绍
安装
sudo apt install ros-humble-ros2-control
sudo apt install ros-humble-ros2-controllers
# 会提示安装好其他相应的东西
# 本来应该还要有ros-humble-gz-ros2-control,但是直接安装提示定位不到
介绍

ros2 control --help# 输出
Commands:list_controller_types 输出可用的控制器类型及其基类list_controllers 输出已加载控制器的列表、类型和状态list_hardware_components 输出可用硬件组件列表list_hardware_interfaces 输出可用命令和状态接口列表load_controller 在控制器管理器中加载控制器reload_controller_libraries 重新加载控制器库set_controller_state 调整控制器的状态set_hardware_component_state 调整硬件组件的状态switch_controllers 在控制器管理器中切换控制器unload_controller 在控制器管理器中卸载控制器view_controller_chains 将加载的链式控制器的图表生成到/tmp/controller_digram.gv.pdf中
使用
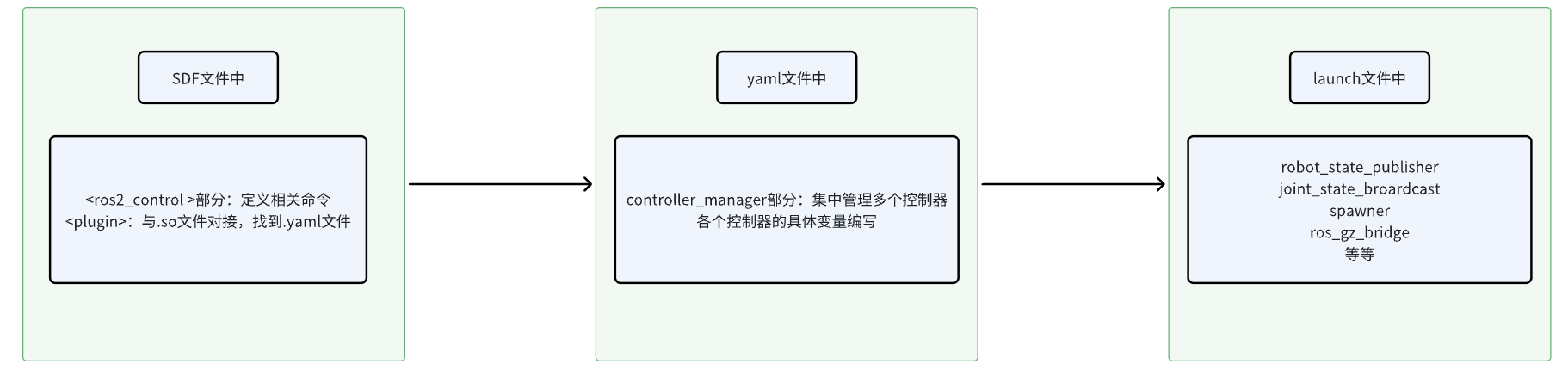
基本上就是写三个地方吧。
在github找到gz_ros2_control_demos这一栏的例子照着写就很舒服了,因为humble的例子还是和gazebo11版本使用,到ubuntu24.04才会完全使用ros2 和 gz sim版本联合,所以我在ubuntu 22.04下使用ros2 humble 和gazebo harmonic也是照着这个jazzy和harmonic的例子用了。
gz_ros2_control
gz 中写法
<ros2_control name="FishBotGazeboSystem" type="system"><hardware><plugin>gazebo_ros2_control/GazeboSystem</plugin></hardware><joint name="left_wheel_joint"><command_interface name="velocity"><param name="min">-1</param><param name="max">1</param></command_interface><command_interface name="effort"><param name="min">-0.1</param><param name="max">0.1</param></command_interface><state_interface name="position" /><state_interface name="velocity" /><state_interface name="effort" /></joint><joint name="right_wheel_joint"><command_interface name="velocity"><param name="min">-1</param><param name="max">1</param></command_interface><command_interface name="effort"><param name="min">-0.1</param><param name="max">0.1</param></command_interface><state_interface name="position" /><state_interface name="velocity" /><state_interface name="effort" /></joint></ros2_control><!-- gz块是为了映射到gz仿真环境中 --><plugin filename="libgazebo_ros2_control.so" name="gazebo_ros2_control"><!-- parameters对应的是.yaml文件中相关的东西 --><parameters>$(find fishbot_description)/config/fishbot_ros2_controller.yaml</parameters><!--<ros><remapping>/fishbot_diff_drive_controller/cmd_vel_unstamped:=/cmd_vel</remapping><remapping>/fishbot_diff_drive_controller/odom:=/odom</remapping></ros>--></plugin>
< ros2_control>项要写在机器人模型文件中,也就是启动时的描述文件,这里就是在机器人xacro描述文件中判断使用gazebo11、gz、实物的ros2_control写法

<!-- gazebo11 -->
<ros2_control name="GazeboSystem" type="system"><hardware><plugin>gazebo_ros2_control/GazeboSystem</plugin></hardware>
</ros2_control><!-- gz --><ros2_control name="GazeboSystem" type="system"><hardware><plugin>gz_ros2_control/GazeboSimSystem</plugin></hardware></ros2_control><!-- 实物 --><ros2_control name="HardwareSystem" type="system"><hardware><plugin>hardware/Hardware</plugin></hardware></ros2_control>
.yaml文件中写法
- 首先写controller_manager,集中定义系统的东西
- 接着后面一个一个写控制器的具体内容
# 总起定义,集中管理
controller_manager:ros__parameters:update_rate: 100 # Hzuse_sim_time: truefishbot_joint_state_broadcaster: # 这个名字是随便取的type: joint_state_broadcaster/JointStateBroadcasteruse_sim_time: truefishbot_effort_controller:type: effort_controllers/JointGroupEffortControllerfishbot_diff_drive_controller:type: diff_drive_controller/DiffDriveController# 对应了上面的控制器名字了,这里详细定义
fishbot_effort_controller:ros__parameters:joints:- left_wheel_joint- right_wheel_jointcommand_interfaces:- effortstate_interfaces:- position- velocity- effortfishbot_diff_drive_controller:ros__parameters:left_wheel_names: ["left_wheel_joint"]right_wheel_names: ["right_wheel_joint"]wheel_separation: 0.17 # 轮距#wheels_per_side: 1 # actually 2, but both are controlled by 1 signalwheel_radius: 0.032 # 轮半径wheel_separation_multiplier: 1.0left_wheel_radius_multiplier: 1.0right_wheel_radius_multiplier: 1.0publish_rate: 50.0odom_frame_id: odombase_frame_id: base_footprintpose_covariance_diagonal : [0.001, 0.001, 0.0, 0.0, 0.0, 0.01]twist_covariance_diagonal: [0.001, 0.0, 0.0, 0.0, 0.0, 0.01]open_loop: trueenable_odom_tf: truecmd_vel_timeout: 0.5#publish_limited_velocity: trueuse_stamped_vel: false#velocity_rolling_window_size: 10
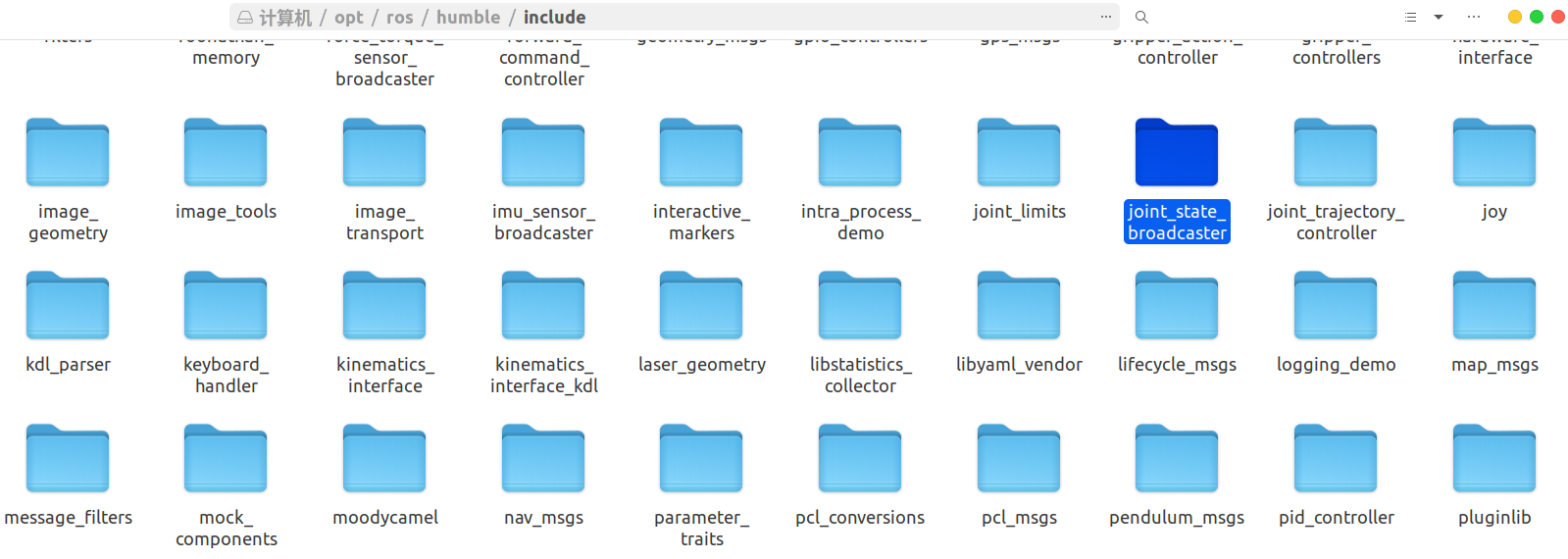
type: joint_state_broadcaster/JointStateBroadcaster的来源
找到ros2的安装路径下的include

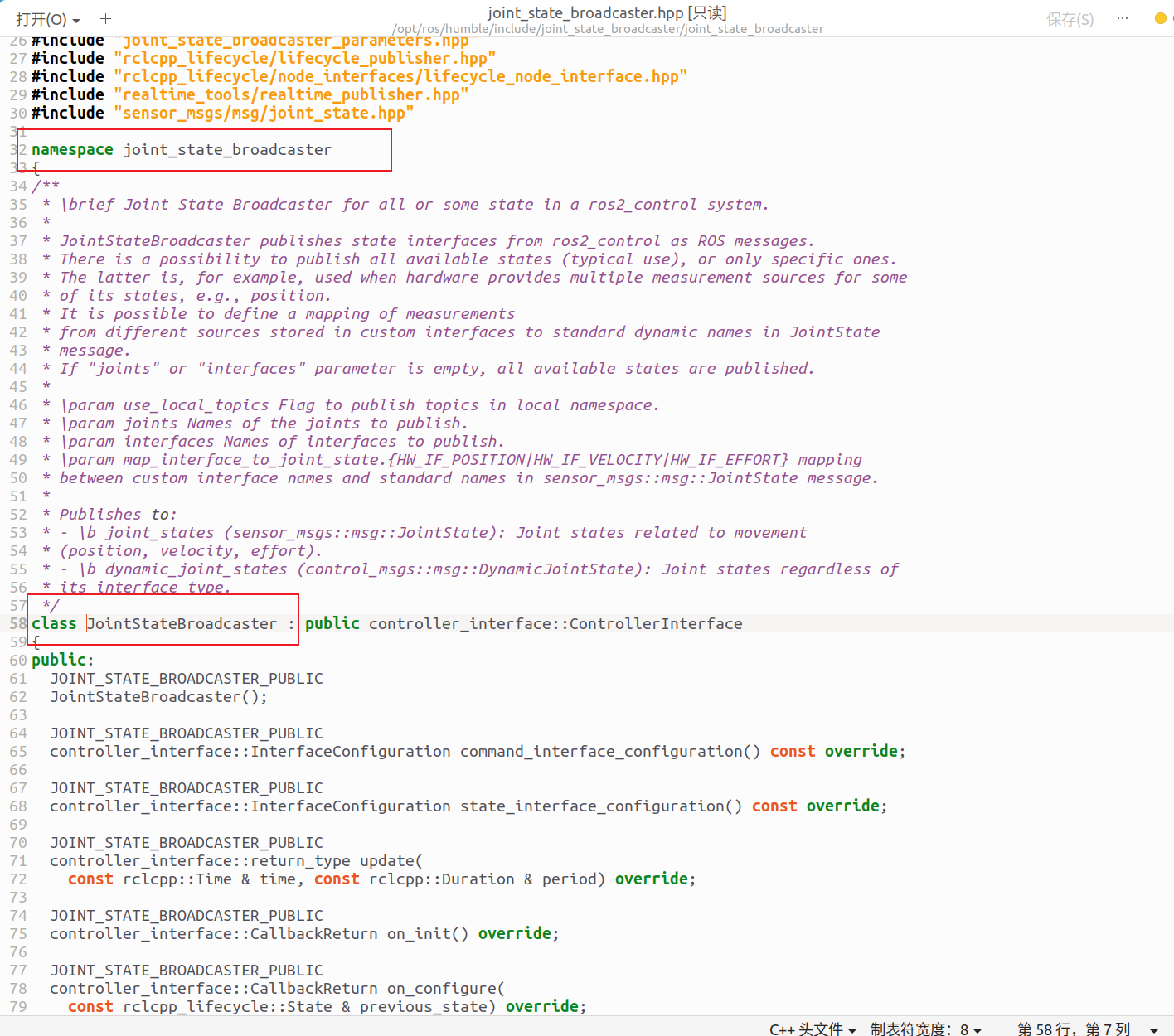
命名空间: joint_state_broadcaster,类名: JointStateBroadcaster
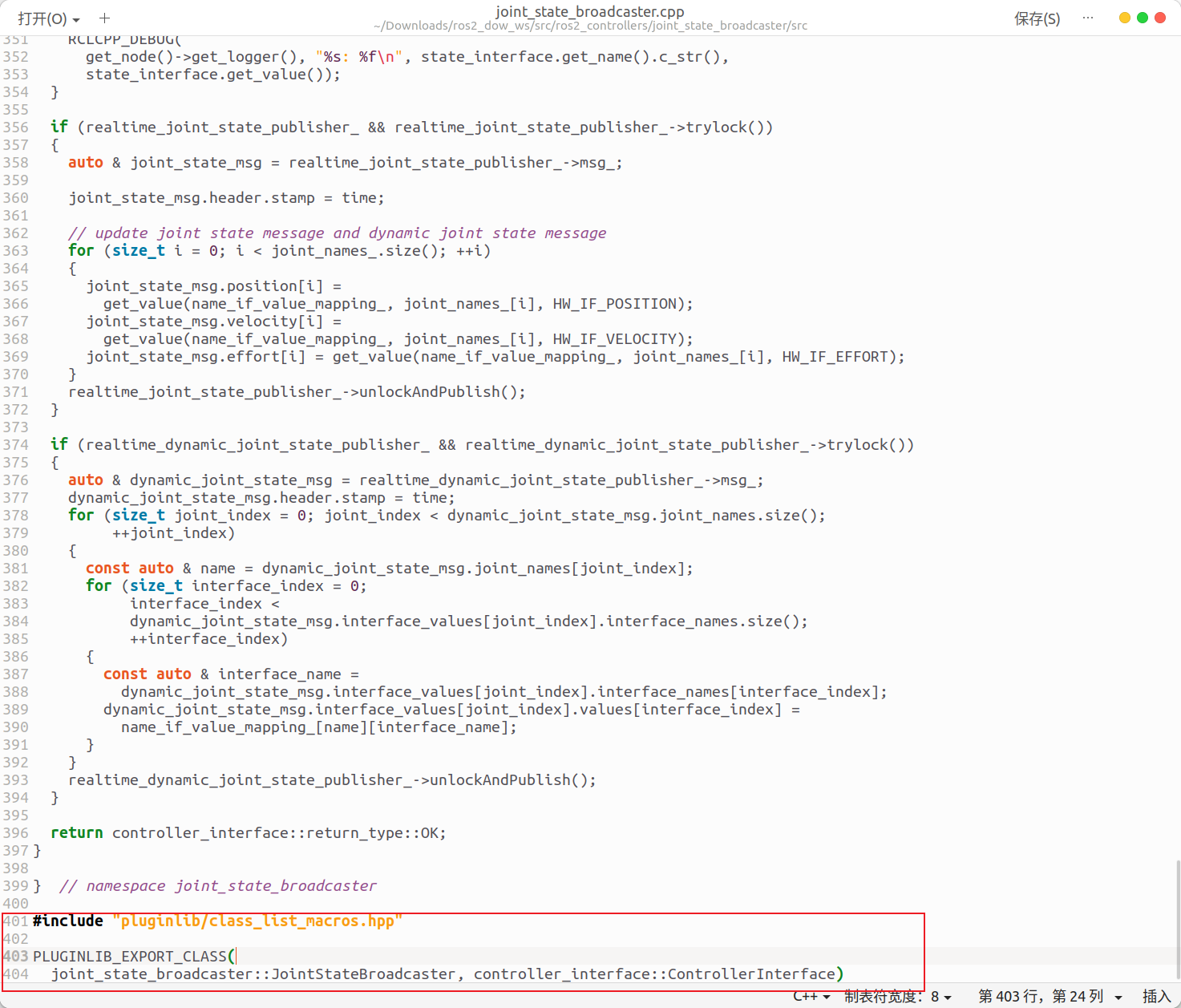
插件描述文件:

name: 插件在 YAML 文件中引用的名称,type: C++ 类的完整命名空间路径
通过 PLUGINLIB_EXPORT_CLASS 宏将控制器注册为插件,cpp文件是从github源码找来的,安装ros2_controllers有apt安装和源码编译两种,apt安装的话就会安装到/opt/ros/humble/下,功能集成到.so文件中了。
后面如果要自己编写插件,也基本按照这个形式,写hpp,写cpp,然后PLUGINLIB_EXPORT_CLASS注册为插件,然后用xml文件完成插件描述。
命令接口关节控制
对joint可以进行位置、速度、力控制,然后需要生成硬件接口。可以有command_interface和transmission两种方式,如果两个都写了,会发出警告说有重复,但不是报错。
command_interface
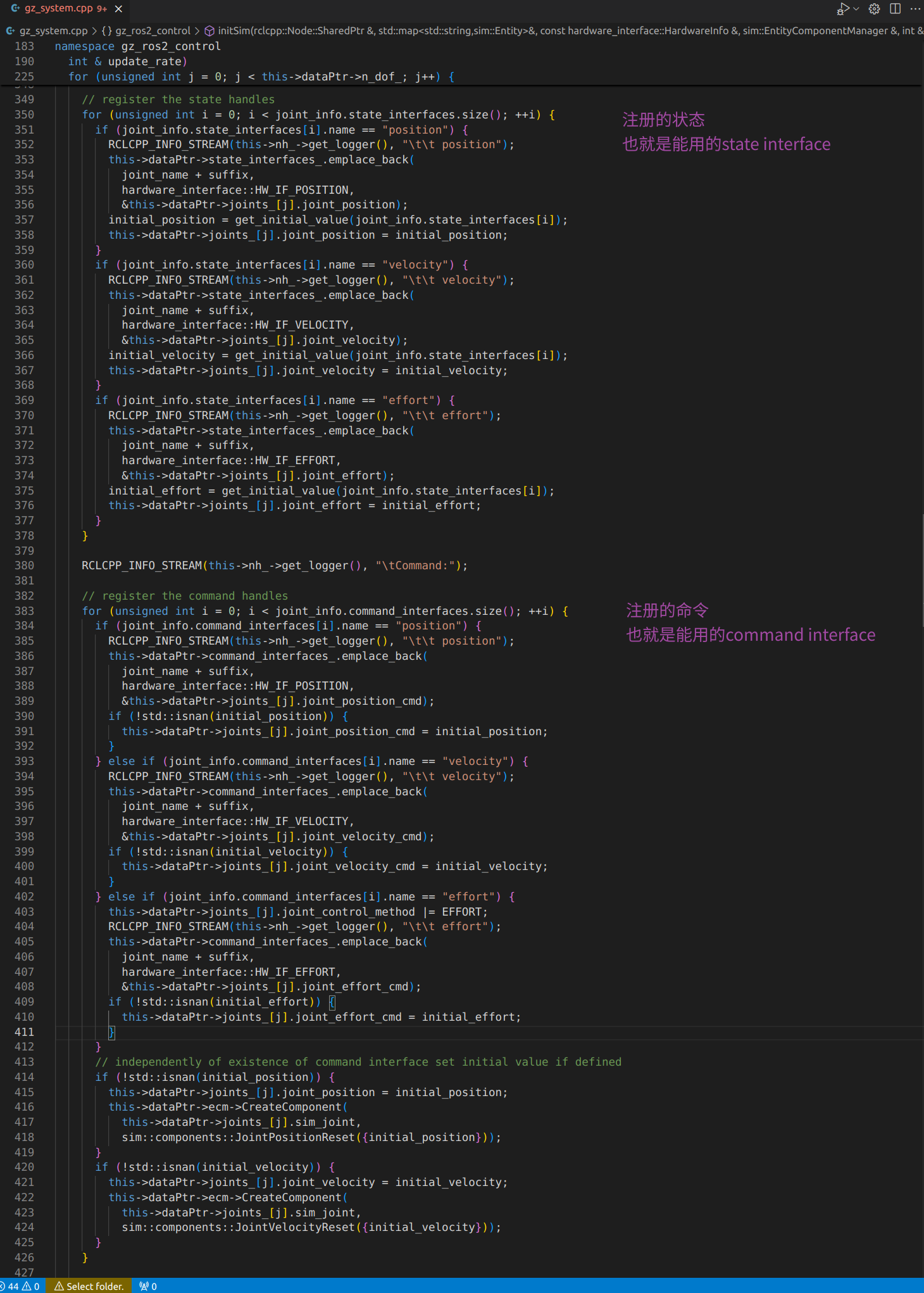
<ros2_control> 标签,并根据 <command_interface> 和 <state_interface> 直接创建对应的硬件接口
<joint name="joint"><command_interface name="position"/><command_interface name="velocity"/><command_interface name="effort"/><command_interface name="kp"/><command_interface name="kd"/><state_interface name="position"/><state_interface name="velocity"/><state_interface name="effort"/></joint>
看源码知道能写哪些东西
transmission
< transmission> 是 ROS2 Control框架中定义关节(Joint)与执行器(Actuator)之间传动关系的关键配置,将物理关节(如电机、舵机)与 ROS2 Control 的控制接口绑定,使控制器能通过硬件接口发送指令,通过 < hardwareInterface> 指定关节支持的控制接口类型(如力矩、位置、速度)。
一般来说transmission项多用于跟实物机器人的时候使用
<transmission name="joint_tran"><type>transmission_interface/SimpleTransmission</type><joint name="joint"><hardwareInterface>hardware_interface/EffortJointInterface</hardwareInterface></joint><actuator name="joint_motor"><hardwareInterface>hardware_interface/EffortJointInterface</hardwareInterface><!-- 减速比为0.5,执行器转动 1 圈,关节仅转动 0.5 圈 --><mechanicalReduction>0.5</mechanicalReduction></actuator></transmission>
CMakelist.txt与package.xml文件
例程中的package.xml使用了这些
<buildtool_depend>ament_cmake</buildtool_depend><build_depend>control_msgs</build_depend><build_depend>geometry_msgs</build_depend><build_depend>rclcpp</build_depend><build_depend>rclcpp_action</build_depend><build_depend>std_msgs</build_depend><exec_depend>ament_index_python</exec_depend><exec_depend>geometry_msgs</exec_depend><exec_depend>launch_ros</exec_depend><exec_depend>launch</exec_depend><exec_depend>rclcpp</exec_depend><exec_depend>robot_state_publisher</exec_depend><exec_depend>ros_gz_bridge</exec_depend><exec_depend>ros_gz_sim</exec_depend><exec_depend>ros2launch</exec_depend><exec_depend>std_msgs</exec_depend><exec_depend>xacro</exec_depend><!-- ros2_control --><exec_depend>ackermann_steering_controller</exec_depend><exec_depend>control_msgs</exec_depend><exec_depend>diff_drive_controller</exec_depend><exec_depend>effort_controllers</exec_depend><exec_depend>gz_ros2_control</exec_depend><exec_depend>hardware_interface</exec_depend><exec_depend>imu_sensor_broadcaster</exec_depend><exec_depend>joint_state_broadcaster</exec_depend><exec_depend>joint_trajectory_controller</exec_depend><exec_depend>mecanum_drive_controller</exec_depend><exec_depend>ros2controlcli</exec_depend><exec_depend>tricycle_controller</exec_depend><exec_depend>velocity_controllers</exec_depend><test_depend>ament_cmake_gtest</test_depend><test_depend>ament_lint_auto</test_depend><test_depend>ament_lint_common</test_depend>
gz_ros2_control与自定义插件
例子描述
看到插件的编写情况差不多都是这样,include,src写c++的实现部分以及注册插件,plugin.xml文件用来描述插件


在urdf中写的< plugin>gz_ros2_control/GazeboSimSystem< /plugin>就出自命名空间和类名
