当前位置: 首页 > news >正文 运功学-【机械臂】 news 2025/10/16 12:13:21 dh法 ex1 第一种表示法 t1=theta1 第二种表示法:(旋转不动,平移变) exp2 减少电脑计算量(不会去计算0和1) 查看全文 http://www.dtcms.com/a/85301.html 相关文章: 1.设备电气设计、装配的注意事项 C语言入门教程100讲(19)do-while 循环 动态规划完全背包系列一>完全平方数 android...... Python学习笔记(4) MySQL 锁机制详解 Scikit-learn模型构建全流程解析:从数据预处理到超参数调优 WebLogic中间件漏洞攻略 六十天前端强化训练之第二十八天之Composition 函数完全指南 串口通信与Modbus通信的区别和联系 2025高频面试算法总结篇【链表堆栈队列】 priority_queue的模拟实现 如何使用logminer 剑指小米特斯拉:秦L EV上市11.98万起 BP神经网络+NSGAII算法(保真) 【F#入门】第四讲 函数,管道与组合 dnf命令详解 hackmyvm-lookup Linux中查找标准库函数的定义 MongoDB未授权访问漏洞 个人博客系统 --- 测试报告 【js逆向】某酒店模拟登录 【蓝桥杯】真题 2386染色时间 (优先队列BFS) 智慧教育云平台支持下的学生自主学习能力培养策略研究 dfs刷题矩阵搜索问题 深入理解Java虚拟机(学习笔记) 开源视频剪辑工具,无损编辑更高效 车道保持中车道线识别 XSS 攻击向量与绕过技巧 OpenCV的基本用法全解析
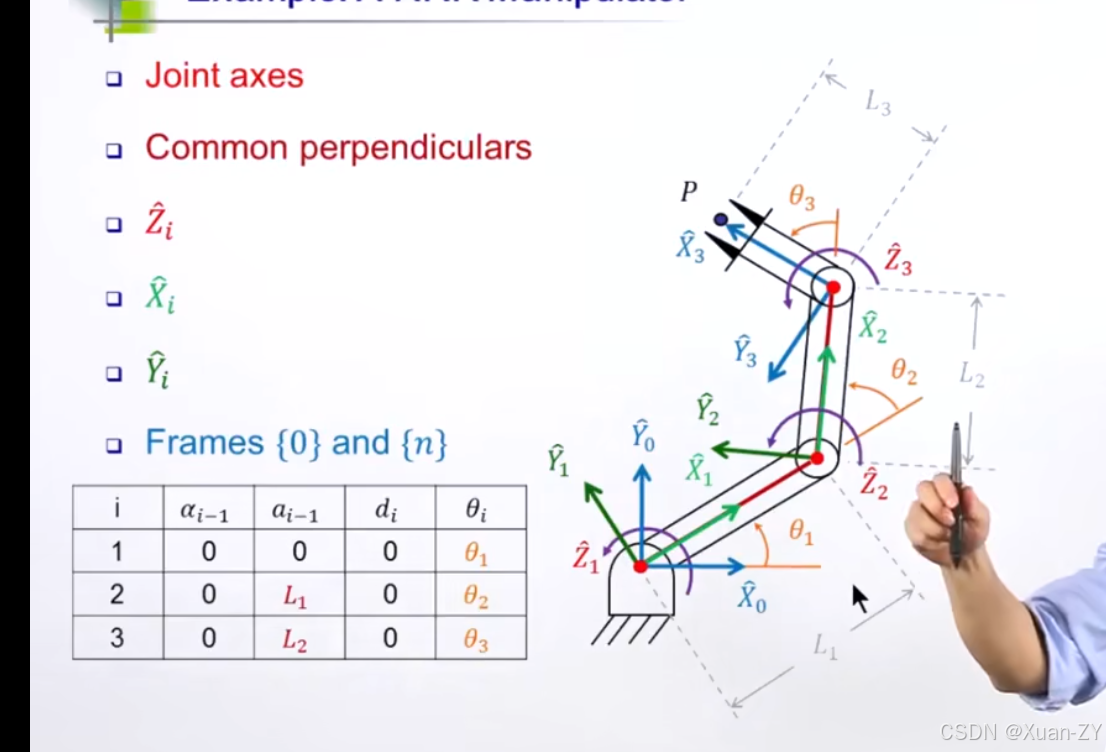
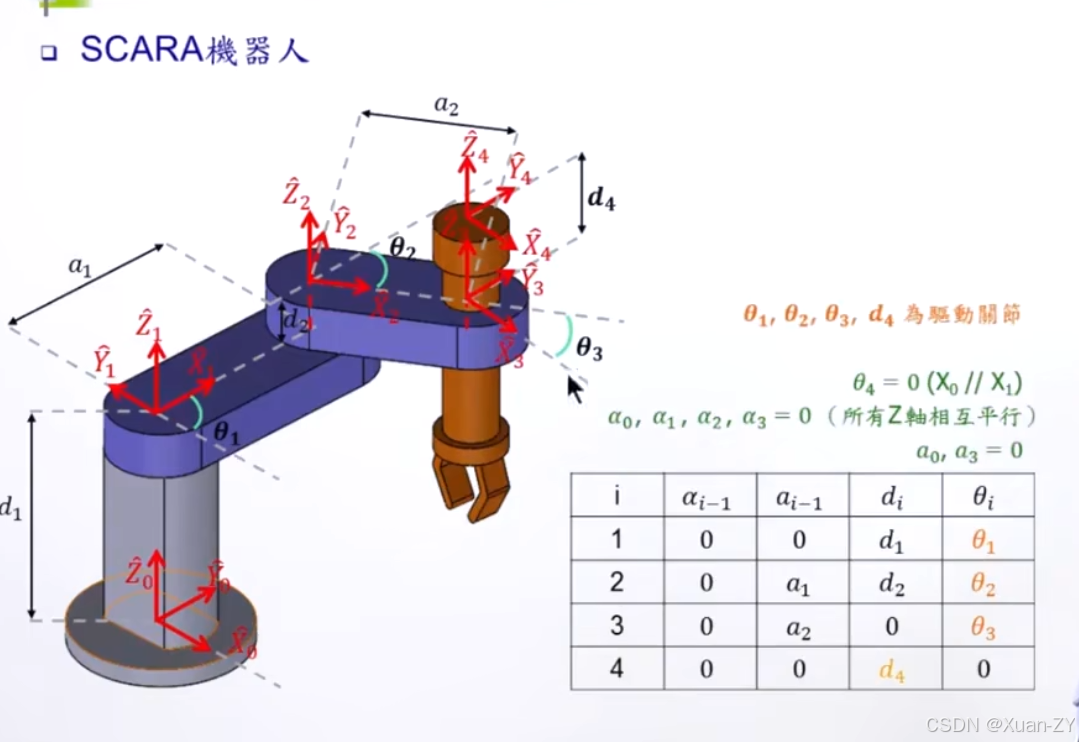
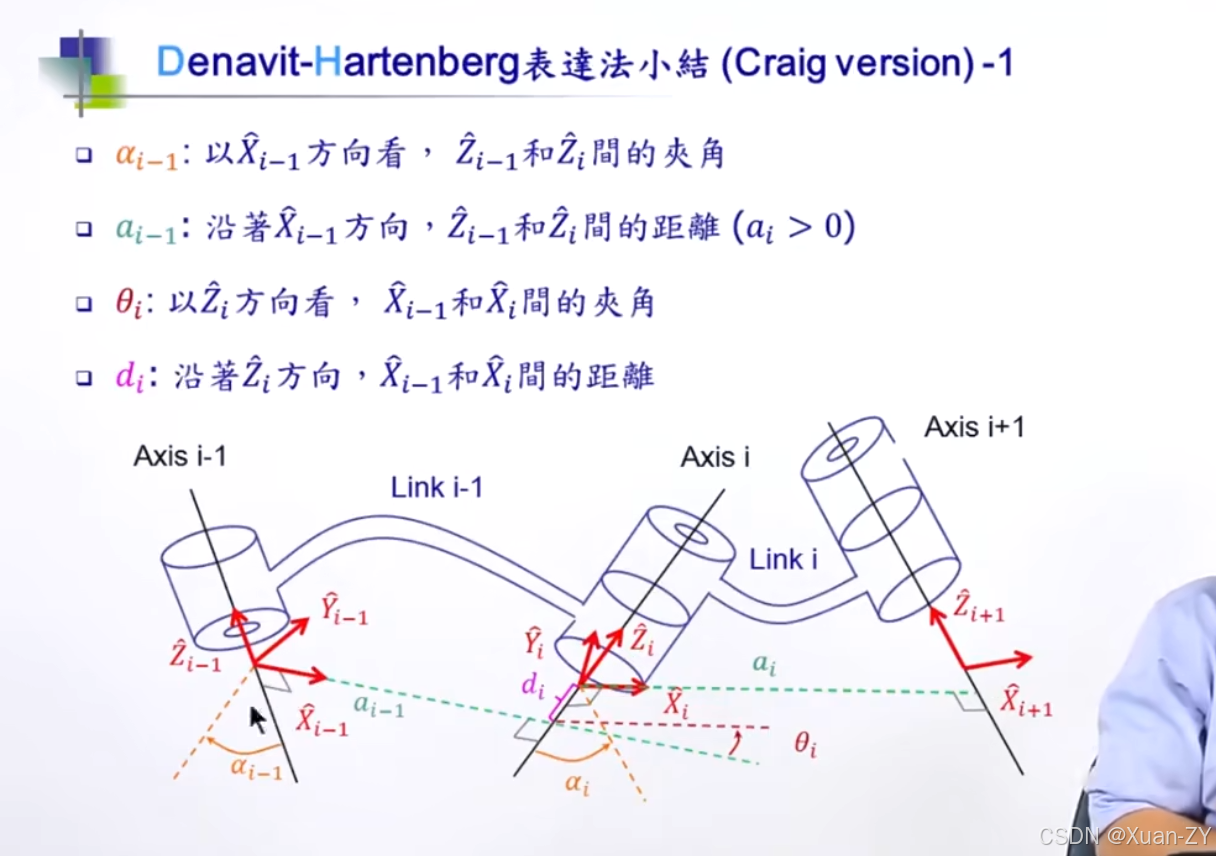
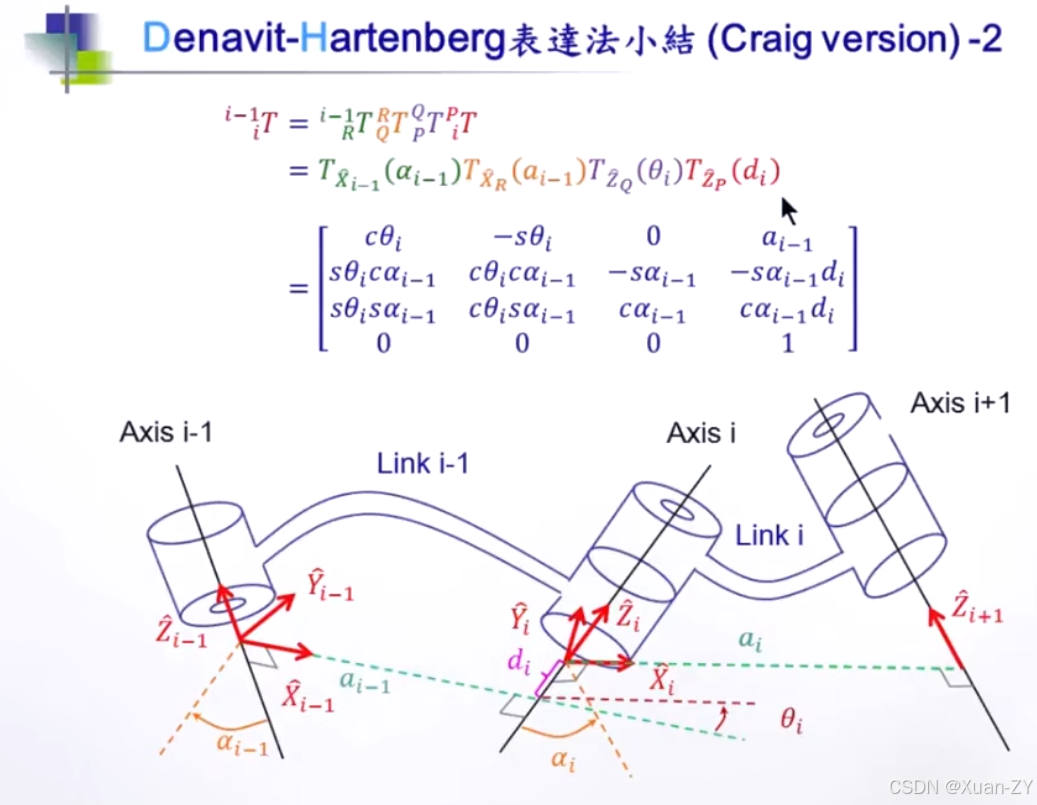
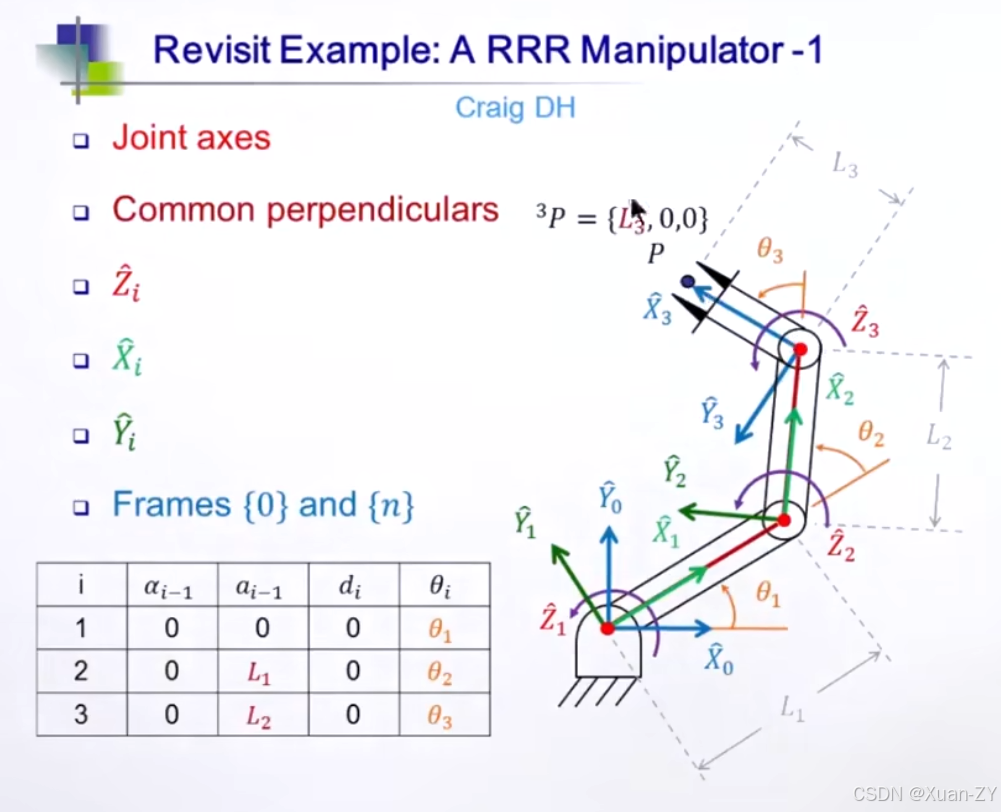
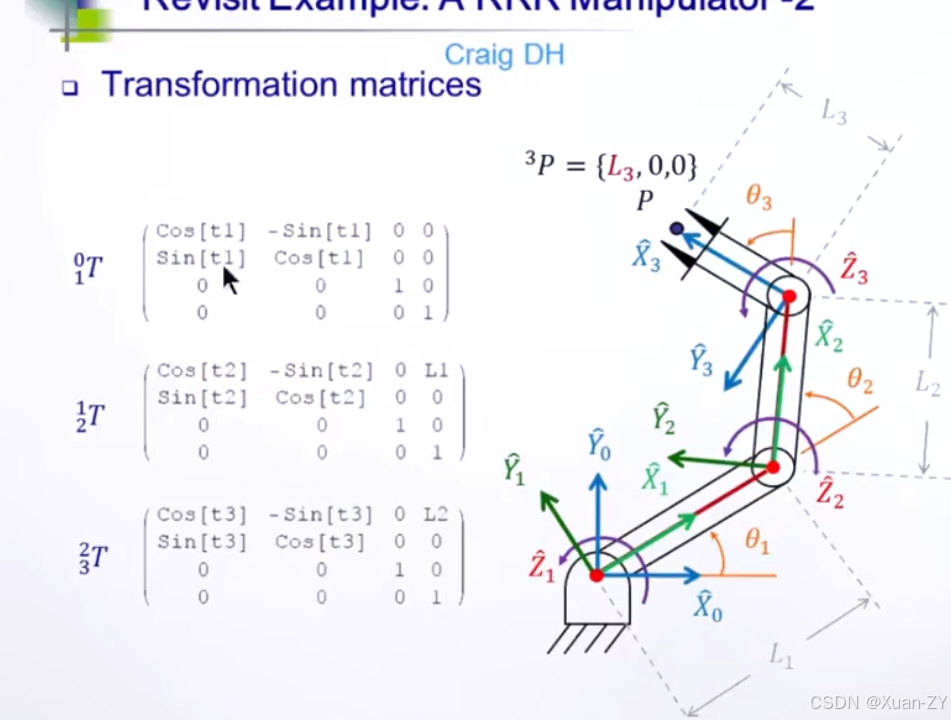
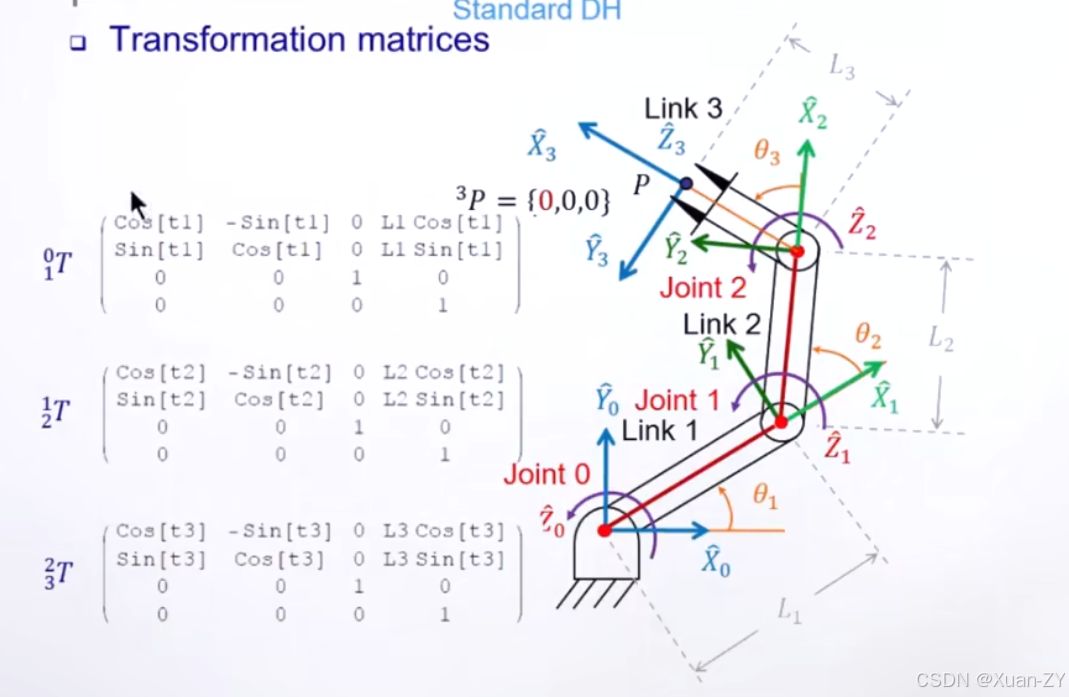
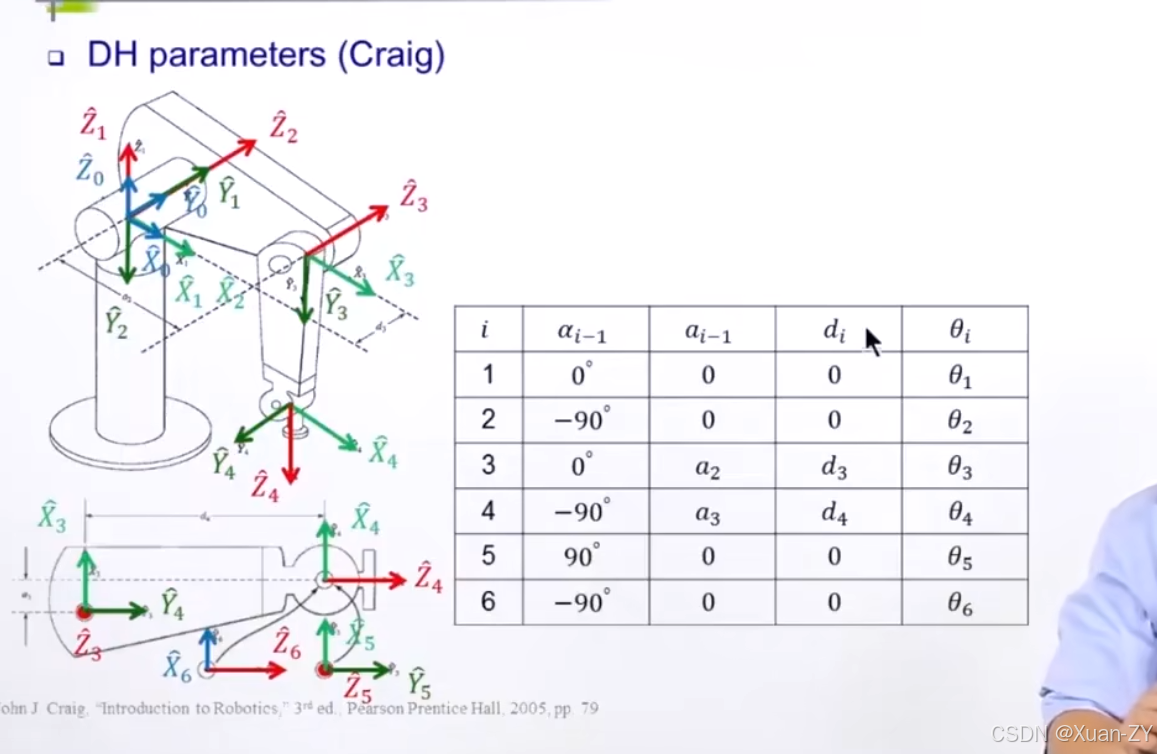
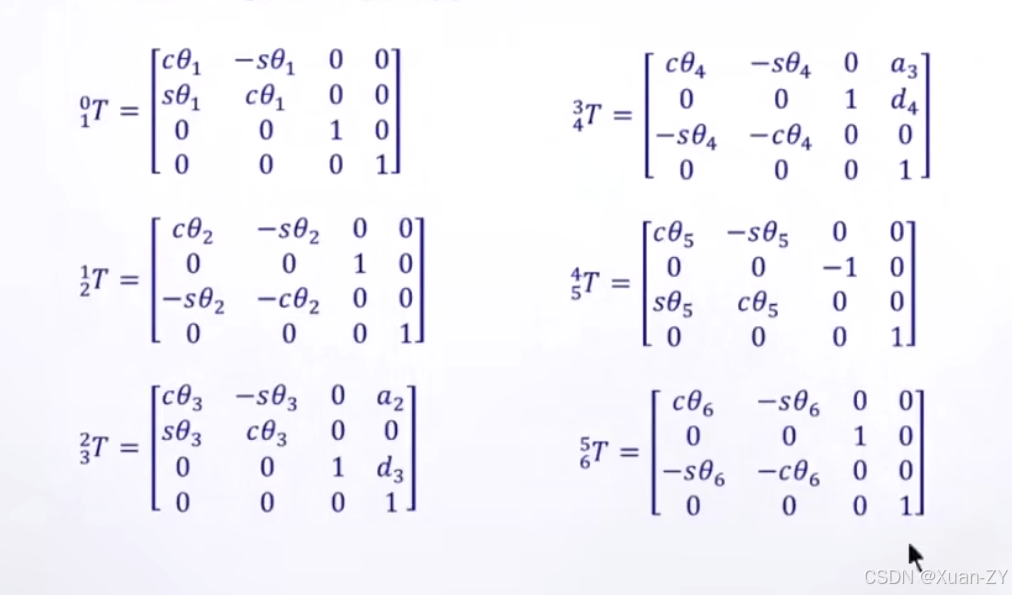
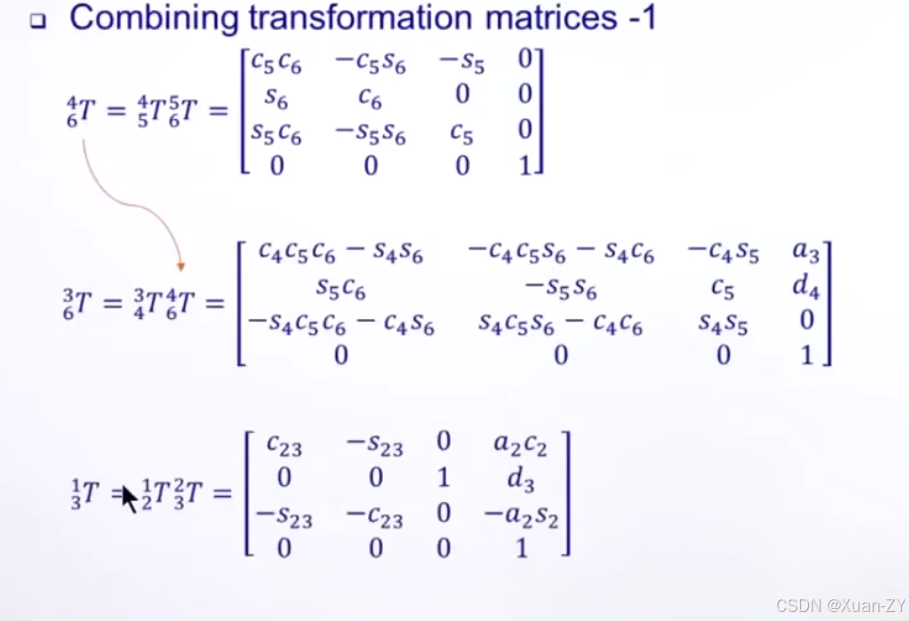
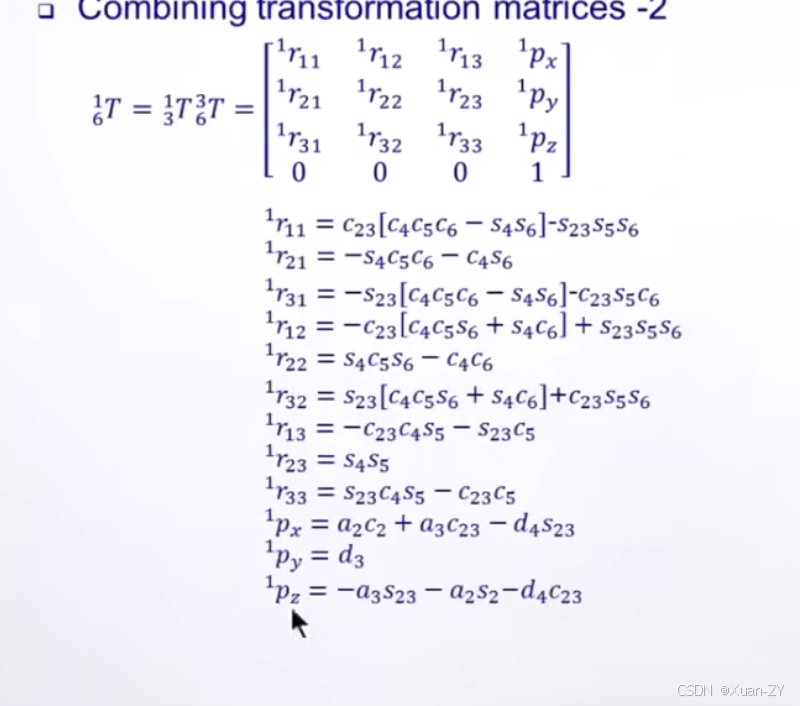
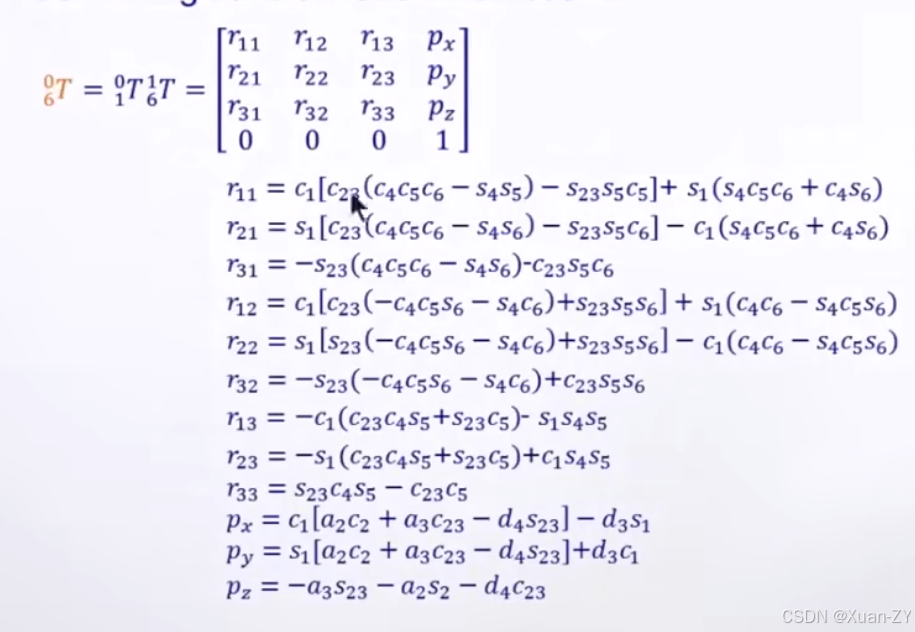
dh法 ex1 第一种表示法 t1=theta1 第二种表示法:(旋转不动,平移变) exp2 减少电脑计算量(不会去计算0和1) 查看全文 http://www.dtcms.com/a/85301.html 相关文章: 1.设备电气设计、装配的注意事项 C语言入门教程100讲(19)do-while 循环 动态规划完全背包系列一>完全平方数 android...... Python学习笔记(4) MySQL 锁机制详解 Scikit-learn模型构建全流程解析:从数据预处理到超参数调优 WebLogic中间件漏洞攻略 六十天前端强化训练之第二十八天之Composition 函数完全指南 串口通信与Modbus通信的区别和联系 2025高频面试算法总结篇【链表堆栈队列】 priority_queue的模拟实现 如何使用logminer 剑指小米特斯拉:秦L EV上市11.98万起 BP神经网络+NSGAII算法(保真) 【F#入门】第四讲 函数,管道与组合 dnf命令详解 hackmyvm-lookup Linux中查找标准库函数的定义 MongoDB未授权访问漏洞 个人博客系统 --- 测试报告 【js逆向】某酒店模拟登录 【蓝桥杯】真题 2386染色时间 (优先队列BFS) 智慧教育云平台支持下的学生自主学习能力培养策略研究 dfs刷题矩阵搜索问题 深入理解Java虚拟机(学习笔记) 开源视频剪辑工具,无损编辑更高效 车道保持中车道线识别 XSS 攻击向量与绕过技巧 OpenCV的基本用法全解析