YOLOV8添加ASPP改进
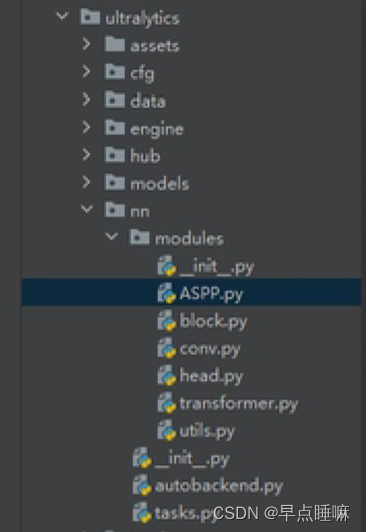
1.v8本身的模块存放在nn文件夹下。
2.在nn文件夹下新建一个ASPP.py文件,将新添加的模块写入其中。
3.把下面这段代码复制进去
import torch
import torch.nn as nn
import numpy as np
import torch.nn.functional as F
# without BN version
class ASPP(nn.Module):
def __init__(self, in_channel=512, out_channel=256):
super(ASPP, self).__init__()
self.mean = nn.AdaptiveAvgPool2d((1, 1)) # (1,1)means ouput_dim
self.conv = nn.Conv2d(in_channel,out_channel, 1, 1)
self.atrous_block1 = nn.Conv2d(in_channel, out_channel, 1, 1)
self.atrous_block6 = nn.Conv2d(in_channel, out_channel, 3, 1, padding=6, dilation=6)
self.atrous_block12 = nn.Conv2d(in_channel, out_channel, 3, 1, padding=12, dilation=12)
self.atrous_block18 = nn.Conv2d(in_channel, out_channel, 3, 1, padding=18, dilation=18)
self.conv_1x1_output = nn.Conv2d(out_channel * 5, out_channel, 1, 1)
def forward(self, x):
size = x.shape[2:]
image_features = self.mean(x)
image_features = self.conv(image_features)
image_features = F.upsample(image_features, size=size, mode='bilinear')
atrous_block1 = self.atrous_block1(x)
atrous_block6 = self.atrous_block6(x)
atrous_block12 = self.atrous_block12(x)
atrous_block18 = self.atrous_block18(x)
net = self.conv_1x1_output(torch.cat([image_features, atrous_block1, atrous_block6,
atrous_block12, atrous_block18], dim=1))
return netimport torch
import torch.nn.functional as F
import torch.nn as nn
class ASPP(nn.Module):
def __init__(self, in_channel=512, out_channel=256):
super(ASPP, self).__init__()
self.mean = nn.AdaptiveAvgPool2d((1, 1)) # (1,1)means ouput_dim
self.conv = nn.Conv2d(in_channel, out_channel, 1, 1)
self.atrous_block1 = nn.Conv2d(in_channel, out_channel, 1, 1)
self.atrous_block6 = nn.Conv2d(in_channel, out_channel, 3, 1, padding=6, dilation=6)
self.atrous_block12 = nn.Conv2d(in_channel, out_channel, 3, 1, padding=12, dilation=12)
self.atrous_block18 = nn.Conv2d(in_channel, out_channel, 3, 1, padding=18, dilation=18)
self.conv_1x1_output = nn.Conv2d(out_channel * 5, out_channel, 1, 1)
def forward(self, x):
size = x.shape[2:]
image_features = self.mean(x)
image_features = self.conv(image_features)
image_features = F.upsample(image_features, size=size, mode='bilinear')
atrous_block1 = self.atrous_block1(x)
atrous_block6 = self.atrous_block6(x)
atrous_block12 = self.atrous_block12(x)
atrous_block18 = self.atrous_block18(x)
net = self.conv_1x1_output(torch.cat([image_features, atrous_block1, atrous_block6,
atrous_block12, atrous_block18], dim=1))
return net
if __name__ == '__main__':
x = torch.randn(1, 256, 16, 16)
model = ASPP(256, 256)
print(model(x).shape)SPPFCSPC模块使用以下代码
import torch
import torch.nn.functional as F
import torch.nn as nn
####### SPPFCSPC #####
class SPPFCSPC(nn.Module):
def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5, k=5):
super(SPPFCSPC, self).__init__()
c_ = int(2 * c2 * e) # hidden channels
self.cv1 = Conv(c1, c_, 1, 1)
self.cv2 = Conv(c1, c_, 1, 1)
self.cv3 = Conv(c_, c_, 3, 1)
self.cv4 = Conv(c_, c_, 1, 1)
self.m = nn.MaxPool2d(kernel_size=k, stride=1, padding=k // 2)
self.cv5 = Conv(4 * c_, c_, 1, 1)
self.cv6 = Conv(c_, c_, 3, 1)
self.cv7 = Conv(2 * c_, c2, 1, 1)
def forward(self, x):
x1 = self.cv4(self.cv3(self.cv1(x)))
x2 = self.m(x1)
x3 = self.m(x2)
y1 = self.cv6(self.cv5(torch.cat((x1, x2, x3, self.m(x3)), 1)))
y2 = self.cv2(x)
return self.cv7(torch.cat((y1, y2), dim=1))
####### end of SPPFCSPC #####
if __name__ == '__main__':
x = torch.randn(1, 256, 16, 16)
model = SPPFCSPC(256, 256)
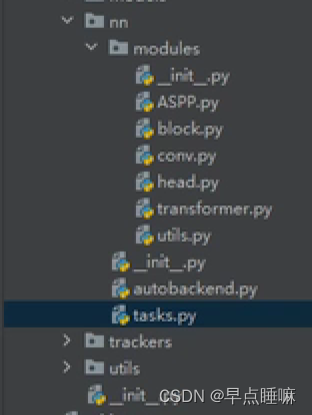
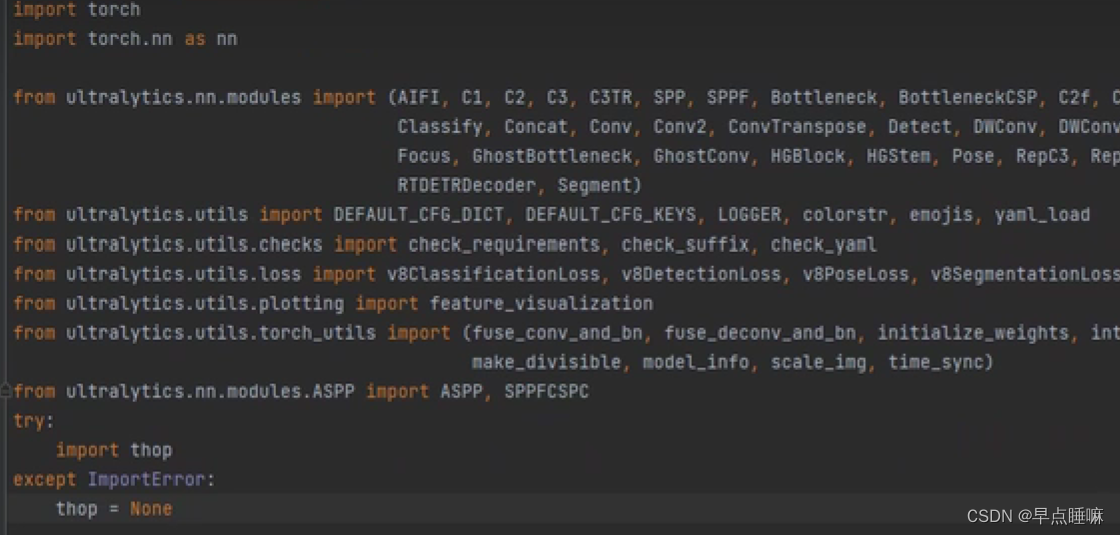
print(model(x).shape)4.引入配置好的模块环境。
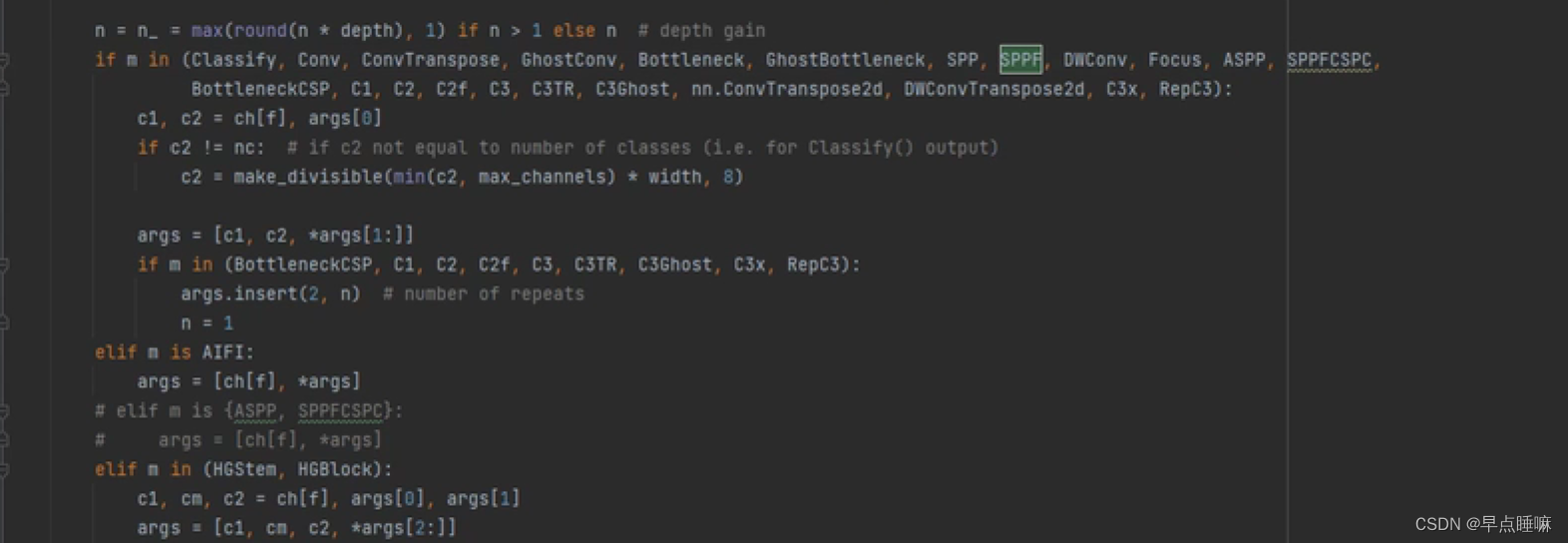
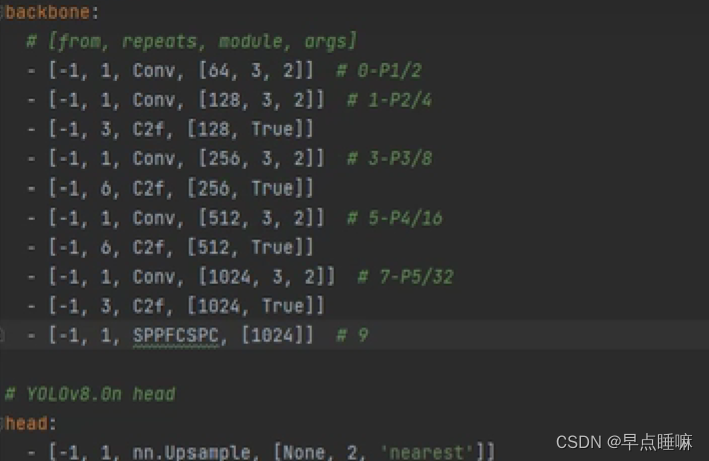
5.复制一份yolov8.yaml文件,修改模型参数
6. yolov8-ASPP.yaml文件
6.修改配置代码