登山第十九梯:实时点云压缩——量变质不变
文章目录
一 摘要
二 资源
三 内容
一 摘要
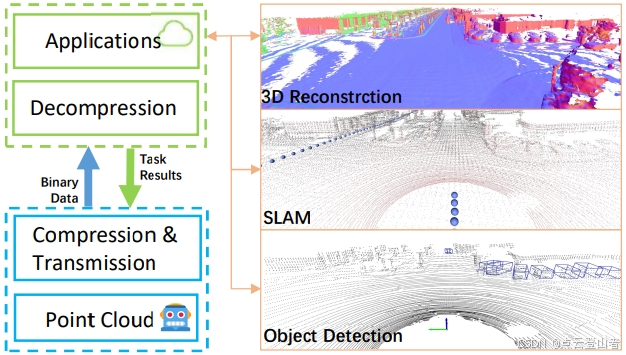
LiDAR 因其能够提供准确的环境结构信息而被广泛用于自主机器人。然而,点云的大尺寸给数据存储和传输方面带来了挑战。在本文中,我们提出了一种用于资源受限机器人应用的新型点云压缩和传输框架,称为 RCPCC。我们迭代拟合具有相似范围值的点云表面,并通过它们的空间关系消除冗余。然后,我们使用形状自适应 DCT (SADCT) 来变换不拟合点,并通过量化变换后的系数来减少数据量。我们以 QoE 为优化目标,设计了一种自适应码率控制策略,以控制传输的点云质量。实验表明,我们的框架实现了 40× 到 80× 的压缩率,同时为下游应用保持了高精度。当压缩率超过 70 时,我们的方法在准确性方面明显优于其他基线。此外,在通信带宽降低的情况下,我们的自适应比特率控制策略展示了显著的 QoE 改进。
二 资源
文章:Real-Time LiDAR Point Cloud Compression and Transmission for Resource-constrained Robots
代码:https://github.com/HITSZ-NRSL/RCPCC.git
日期:2025
三 内容
1)摘要
LiDAR 因其能够提供准确的环境结构信息而被广泛用于自主机器人。然而,点云的大尺寸给数据存储和传输方面带来了挑战。在本文中,我们提出了一种用于资源受限机器人应用的新型点云压缩和传输框架,称为 RCPCC。我们迭代拟合具有相似范围值的点云表面,并通过它们的空间关系消除冗余。然后,我们使用形状自适应 DCT (SADCT) 来变换不拟合点,并通过量化变换后的系数来减少数据量。我们以 QoE 为优化目标,设计了一种自适应码率控制策略,以控制传输的点云质量。实验表明,我们的框架实现了 40× 到 80× 的压缩率,同时为下游应用保持了高精度。当压缩率超过 70 时,我们的方法在准确性方面明显优于其他基线。此外,在通信带宽降低的情况下,我们的自适应比特率控制策略展示了显著的 QoE 改进。
2)创新点
①提出了一种新型的 LiDAR 点云压缩和传输框架,名为 RCPCC,用于处理带宽波动并增强点云传输的实时性能和稳定性。
②提出一种基于 QoE 的自适应码率控制策略,以应对带宽波动,提高点云传输的实时性和稳定性。
③大量实验表明,与最先进的方法相比,RCPCC 实现了有竞争力的压缩率和高精度,同时显著降低了传输延迟
3)算法结构
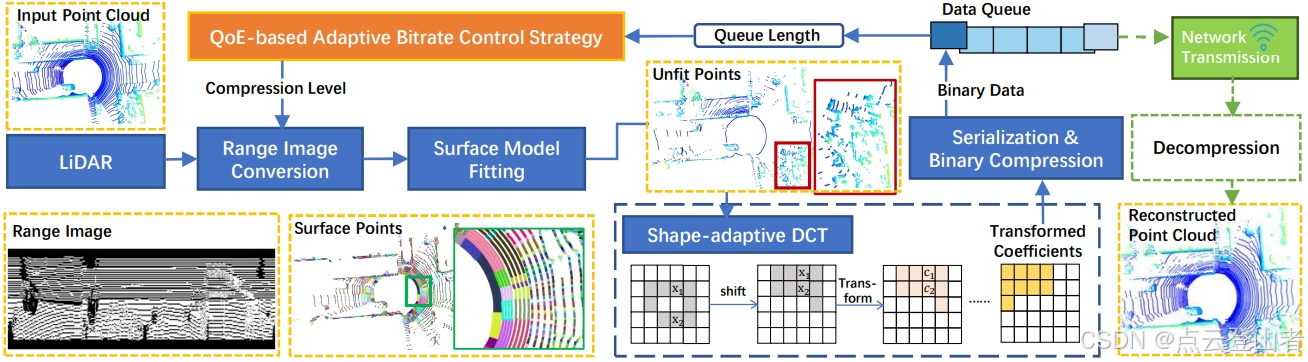
下图说明了所提出的用于资源受限场景的实时 LiDAR 点云压缩和传输框架 RCPCC。点云首先使用球面坐标投影到距离图像中。随后,将范围图像划分为宏块,并对每个宏块进行曲面模型拟合。拟合宏块中的点被编码和参数化,而拟合点则从范围图像中删除。对于未拟合点,应用 SA-DCT 来转换数据并量化转换后的系数,从而平衡压缩率和质量。自适应比特率控制策略使用压缩级别和数据队列长度作为输入,调整下一个点云帧的压缩级别。解码是压缩的逆过程,允许使用相应的逆变换重建原始点云。
A 点云编码
a1 深度图转换
从点云的笛卡尔坐标系通过球形转换到球形坐标系,从而生成2D全景图。转换公式如下:
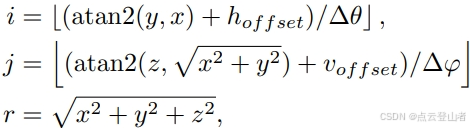
其中索引 i 和 j 表示深度图像中的像素坐标,r 是点云的径向距离,对应于 (i, j) 处的距离值。hoffset 和 voffset 分别是水平和垂直偏移量,与 LiDAR 的视场 (FOV) 相关,确保 i、j 为非负值。∆θ 和 ∆φ 表示离散化细粒度,取决于所选 LiDAR 的水平和垂直分辨率⌊·⌋ 表示向前取整。
深度图像是一种紧凑的表示形式,允许将 3D 点云简化为 2D 图像,从而提高计算效率。此外,深度图像中的相邻点更有可能属于同一范围表面,从而可以更好地利用空间关系进行编码。
a2 表面编码
基于平面拟合的初步探索:实际场景中的点云,很多点处于同一平面,如地面、墙壁等,可通过平面方程 a⋅x+b⋅y+c⋅z+d=0 来近似。利用最小二乘法拟合平面,进而预测点云的径向距离 r^ 。但该方法存在不足,预测 r^ 时需复杂三角函数计算,无法直接利用 range image 中的 (i,j) 坐标。
表面模型的提出与优势:论文提出更直观的表面模型,公式为 r^=−a⋅i+b⋅j+cd 。此模型虽不是欧氏空间中的平面,但能更好捕捉 range image 中点的空间结构,计算也更简便。
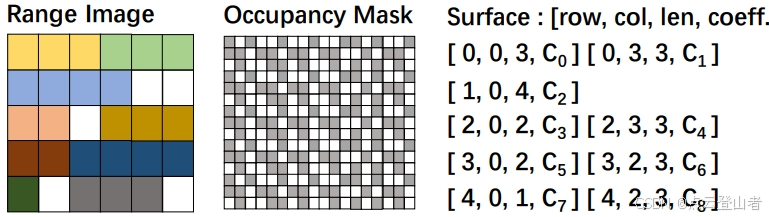
表面模型拟合的具体操作:如上图所示,将 range image 划分为 4×4 的宏块,对每个宏块进行表面拟合。设定距离阈值 Δr ,若宏块内所有点到表面的距离均小于 Δr ,则认定该宏块为表面。对于同一行的宏块,用前一个宏块的表面参数预测下一个宏块,并进行 Δr 测试,通过测试的宏块合并并共享表面参数。 为重建 range image,将点云在 range image 中的位置记录为占用掩码(occupancy mask),并使用四元组(row, col, len, coefficients)对表面进行编码,记录表面块的位置和参数。
a3 未拟合区域编码
确定未拟合点形成的未拟合图像:在完成表面编码后,那些未被表面模型拟合的点云所在的距离图像区域,被称为未拟合图像。不能直接对未拟合图像的原始距离值进行编码,因为表面模型拟合已降低了对精度的要求,直接编码会造成精度冗余;同时也不适宜直接使用图像编码技术(如 JPEG),因其包含大量零值像素,编码效率低且可能引入零值噪声1。
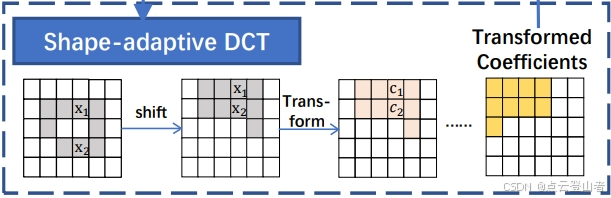
SA - DCT 变换:如上图所示,对未拟合图像应用 SA - DCT 进行时域和频域变换。在编码过程中,将未拟合图像中剩余的未拟合点移至列的上边缘,进行一维 DCT 变换。对列(行)向量x进行 1D DCT 变换产生一维向量ck ,公式为![]() 。接着,将变换后的非零元素按行移至左边缘,再进行一次一维 DCT 变换,最终得到系数矩阵c 。相应的逆变换公式为
。接着,将变换后的非零元素按行移至左边缘,再进行一次一维 DCT 变换,最终得到系数矩阵c 。相应的逆变换公式为 ,其中Lk 是向量x的长度,ALk 是归一化因子。
,其中Lk 是向量x的长度,ALk 是归一化因子。
量化系数矩阵:变换完成后,通过量化步长qstep 对系数矩阵c进行量化,得到量化系数矩阵c∗。量化虽然会引入量化误差,但能减小数据大小,提高熵编码器的压缩率。在 SA - IDCT 重建过程中,虽然需要原始数据中非零元素的位置进行逆变换,但无需额外存储,因为可以通过占用掩码(occupancy mask)排除已拟合点的掩码来推导非零元素的位置。
B 基于QoE的比特率控制
核心思路:在处理激光雷达点云数据传输时,RCPCC 框架定义了与实时传输质量相关的 QoE 目标函数,综合考虑多个因素来优化传输过程中的压缩级别配置。
QoE 目标函数:
 其中,第一项q(−)根据压缩级别分配质量分数,Ri 代表第i帧点云压缩所用压缩级别的配置参数;第二项是对缓冲区队列长度的惩罚项,Ki 表示第i帧点云编码后等待发送的数据包队列长度,μ是相应权重;第三项用于惩罚质量切换,避免频繁的质量切换。
其中,第一项q(−)根据压缩级别分配质量分数,Ri 代表第i帧点云压缩所用压缩级别的配置参数;第二项是对缓冲区队列长度的惩罚项,Ki 表示第i帧点云编码后等待发送的数据包队列长度,μ是相应权重;第三项用于惩罚质量切换,避免频繁的质量切换。
控制策略:通过优化 QoE 目标函数来求解整个传输过程的压缩级别配置Ri:N∗ 。具体策略包括:
• 质量改进尝试:如果队列长时间保持稳定,我们尝试提高质量(QoE 的第一项)。如果结果不满意,我们将恢复到之前的状态。
• 历史记忆:决策不仅基于当前状态,还考虑历史缓冲区长度(与第二项相关)。
• 缓冲区切换:质量切换不会立即影响缓冲区长度。因此,开关之间需要一个缓冲期,以减少频繁质量变化的惩罚(减少第三项)。
4)实验
A 实验设置
对比方法选择:选取 KDTree - based method(Google 的 Draco)、Geometry - based compression method(G - PCC)、Range image - based compression using JPEG2000(JPEG Range)、octree - based method(来自 Point Cloud Library,PCL)作为基线对比方法。
实验平台与数据集:在配备 Intel i7 - 12650H 处理器和 16GB RAM 的桌面平台上进行实验。使用 KITTI odometry 数据集进行定位实验(采用 LiDAR odometry KISSICP 算法);KITTI detection 数据集进行目标检测实验(采用 PointPillar 算法);MaiCity 数据集进行网格重建实验(利用 VDBFusion 通过 TSDF 地图和移动立方体提取网格)。
评估指标与参数设定:综合测试所有方法在各序列和帧上的表现,计算算术平均值进行评估。RCPCC 方法的参数包括(Δθ,Δφ,Δr,qstep ),后续实验用四元组表示参数设置。在基于 QoE 的自适应比特率控制实验中,通过局域网路由器手动模拟网络带宽变化,记录各时刻的压缩质量和缓冲区队列长度,计算整个传输过程的 QoE。
B 对比分析
b1 网格重建
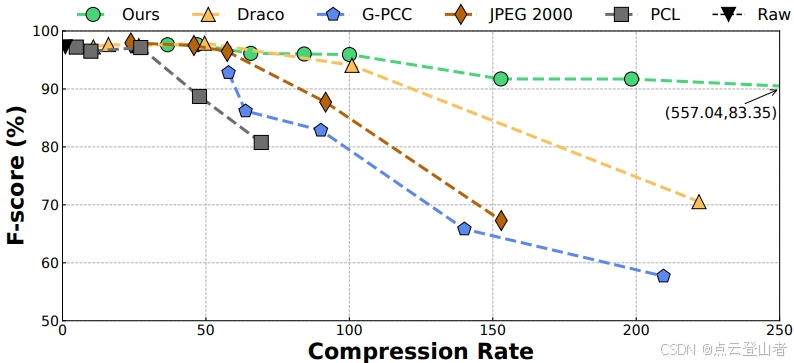
如上图所示,RCPCC 方法在网格重建中表现优异,压缩比和映射性能均优于其他方法。以 F 分数评估表面质量,RCPCC 在 100.5× 压缩比下,F 分数达 95.94%;198.4× 压缩比时,F 分数仍有 91.70%。相比之下,Draco 在 100.7× 压缩比下,F 分数为 94.07%,且其他方法在高压缩比下 F 分数下降迅速。
b2 定位
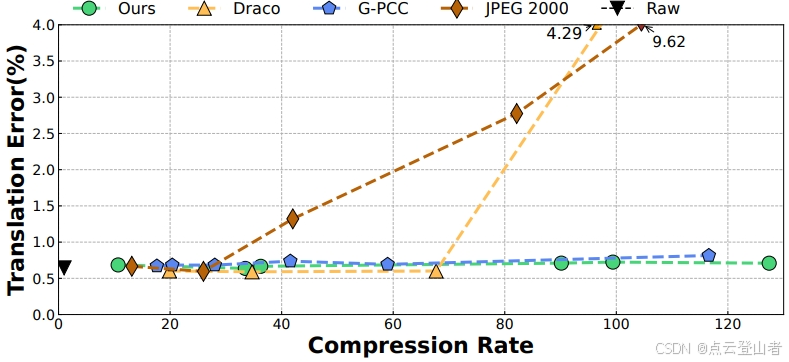
如上图所示,当压缩比大于 100× 时,RCPCC 的平均平移误差低于其他基线方法。在 KITTI 数据集(seq.00 - 10)上,RCPCC 在 36.3× 压缩比时,平移误差与原始点云相近;99.7× 压缩比时,误差率仅为 0.71%,而 JPEG2000 和 Draco 在 100× 左右压缩比时,平移误差显著增加,分别达到 4.29% 和 9.62%。
b3 目标检测
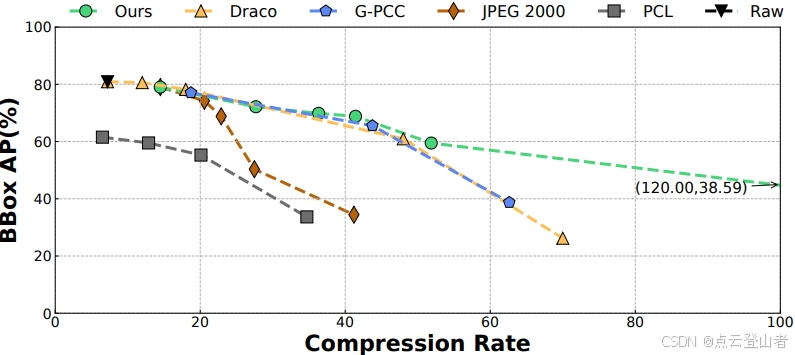
如上图所示,当压缩比超过 36.4×,RCPCC 的目标检测精度高于其他方法。在 KITTI 目标检测数据集上,原始点云的边界框平均精度(AP)为 80.89%,RCPCC 在 14.4× 压缩比时,AP 达到 79.03%;41.4× 压缩比时,仍保持 68.8% 的精度,而 PCL 和 JPEG2000 在压缩比大于 40× 时,精度迅速下降至 40% 以下。
C 消融实验
c1 模型对比

如上表所示,通过对比平面模型和表面模型预测点云的平均绝对误差(MAE),发现相同距离阈值下,表面模型的 MAE 更低,表明其预测效果更好。
c2 SA-DCT 的作用
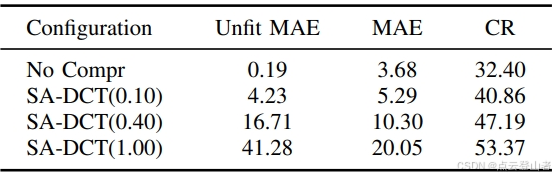
如上表所示,对比未对未拟合图像压缩(仅表面模型拟合)和使用 SA - DCT 压缩未拟合图像的情况,使用 SA - DCT 后,压缩比得到显著提升(如量化步长为 0.10 时,压缩比从 32.40× 提升至 40.86×),虽然 MAE 有轻微增加(从 3.68 增加到 5.29),但在可接受范围内。
D 传输实验
评估点云传输过程中的 QoE,对比 RCPCC 有无自适应比特率控制策略的传输性能。实验中压缩级别根据不同参数预定义为 0 - 5(从精细到粗糙),模拟网络带宽变化,起始带宽 300KB/s,55 秒时降至 100KB/s,120 秒时升至 130KB/s,245 秒时升至 160KB/s。
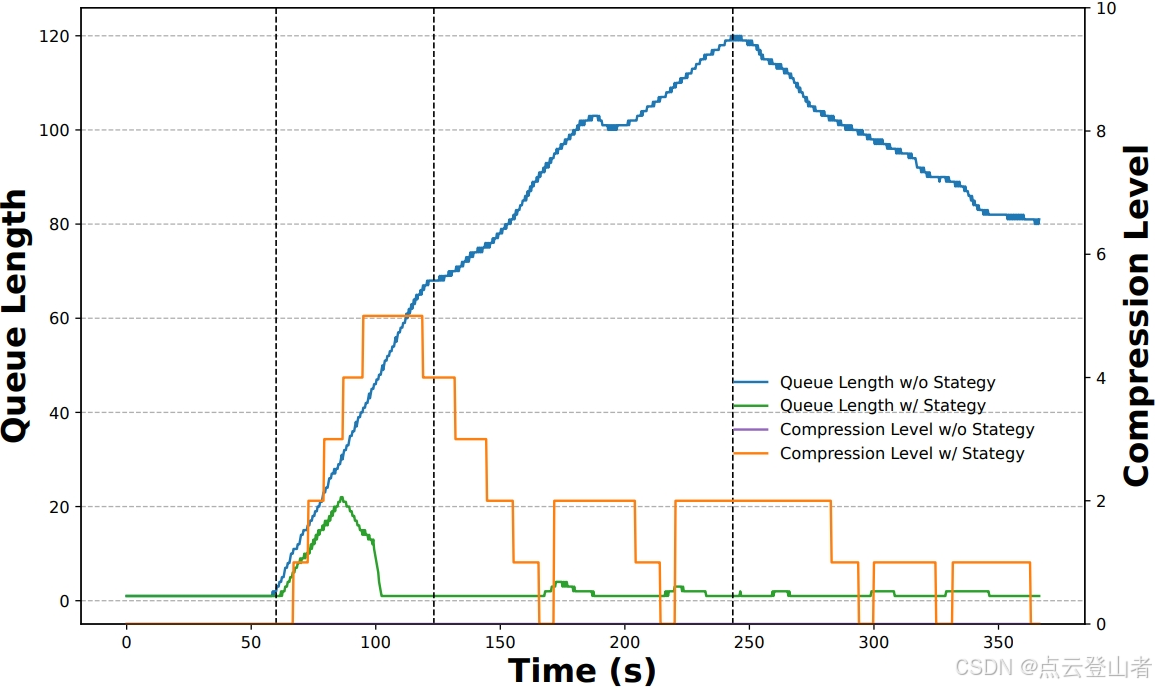
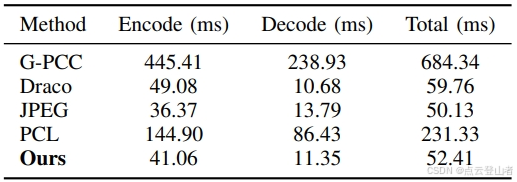
如上图所示,当带宽下降时,基于 QoE 的自适应比特率控制策略使压缩级别从 0 逐渐增加到 5 以适应带宽变化,而无策略时压缩级别保持为 0,导致数据队列增长和传输延迟增加。带宽上升时,该策略通过质量改进尝试逐渐降低压缩级别,但可能会引起延迟,此时历史记忆方案可防止过度使用质量改进尝试,维持数据队列稳定。此外,如下表所示,RCPCC 的编码时间为 41.06ms,解码时间为 11.35ms,速度足以支持实时点云压缩。
5)结论
本文提出了一种新颖的实时 LiDAR 点云压缩和传输框架,称为 RCPCC。高效的点云压缩和自适应比特率控制策略的结合使我们的方法能够帮助资源受限的机器人实现实时点云传输,我们的方法实现了高达 80 倍的压缩率,实时压缩速度 (> 10 FPS),同时保持较高的应用准确性。它在压缩速率、速度和准确性方面超过了最先进的点云压缩标准。