当前位置: 首页 > news >正文 Gazebo直接构建仿真世界 news 2025/10/16 12:33:15 1. 启动仿真 ros2 launch gazebo_ros gazebo.launch.py 2. 菜单构建世界 3. 引入自定义模型/世界 4. 顶部拖拽立体模型 5. 最终效果 查看全文 http://www.dtcms.com/a/62681.html 相关文章: VSCode-Server 在 Linux 容器中的手动安装指南 【技海登峰】Kafka漫谈系列(八)Controller:Zookeeper模式与KRaft模式 山东2025年网络管理员报名工作经验要求与所需材料 无标签数据增强+高效注意力GAN:基于CARLA的夜间车辆检测精度跃升 责任链模式的C++实现示例 项目中async和await的应用场景 PHPCMS V9 登录加密改造 【redis】应用场景:共享会话和手机验证码 Quickwit+Jaeger+Prometheus+Grafana搭建Java日志管理平台 使用AI一步一步实现若依前端(7) Flutter 基础组件 Text 详解 工作记录 2017-01-05 算法面试题深度解析:LeetCode 2012.数组元素的美丽值求和计算与多方案对比 【深度学习】读写文件 LiveGBS流媒体平台GB/T28181常见问题-视频流安全控制HTTP接口鉴权勾选流地址鉴权后401Unauthorized如何播放调用接口流地址校验 Web开发-PHP应用TP框架MVC模型路由访问模版渲染安全写法版本漏洞 echarts geo3D地图标记点自定义照片 Android StrictMode 使用与原理深度解析 Android : Camera之CHI API DeFi基石ERC4626标准实现一个金库合约 [GHCTF 2025](>﹏<) Manus AI:多语言手写识别的技术革命与未来图景 Java 大视界 -- Java 大数据在智能医疗药品研发数据分析与决策支持中的应用(126) linux下的网络抓包(tcpdump)介绍 网络基础概述2 入门到入土,Java学习 day16(算法1) 【2025】AWVS安装保姆级教程(最新25.1.2可用) HEC-HMS水文建模全解析:气候变化与极端水文、离散化流域单元精准刻画地表径流、基流与河道演进过程 STM32全系大阅兵(2) 七层协议攻防实战:从HTTP慢速攻击到DNS隧道检测
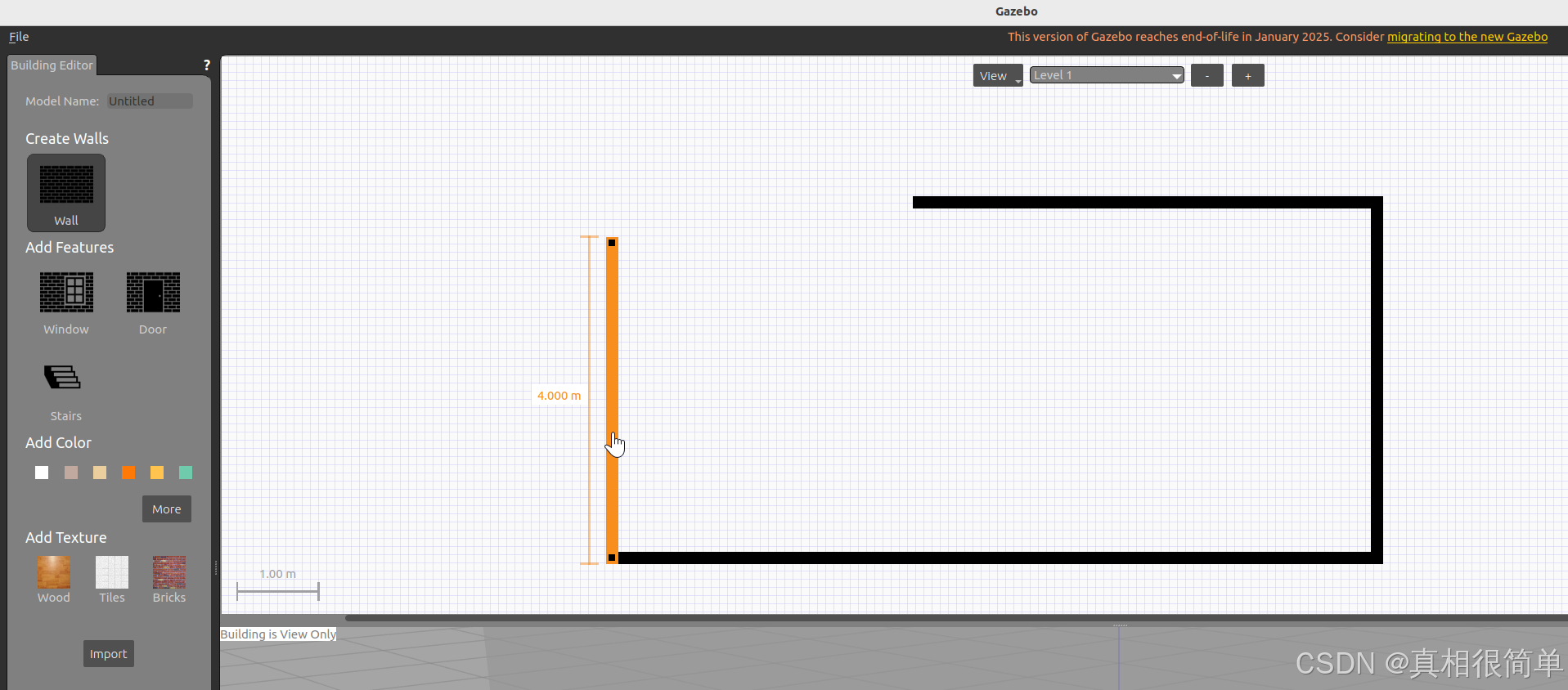
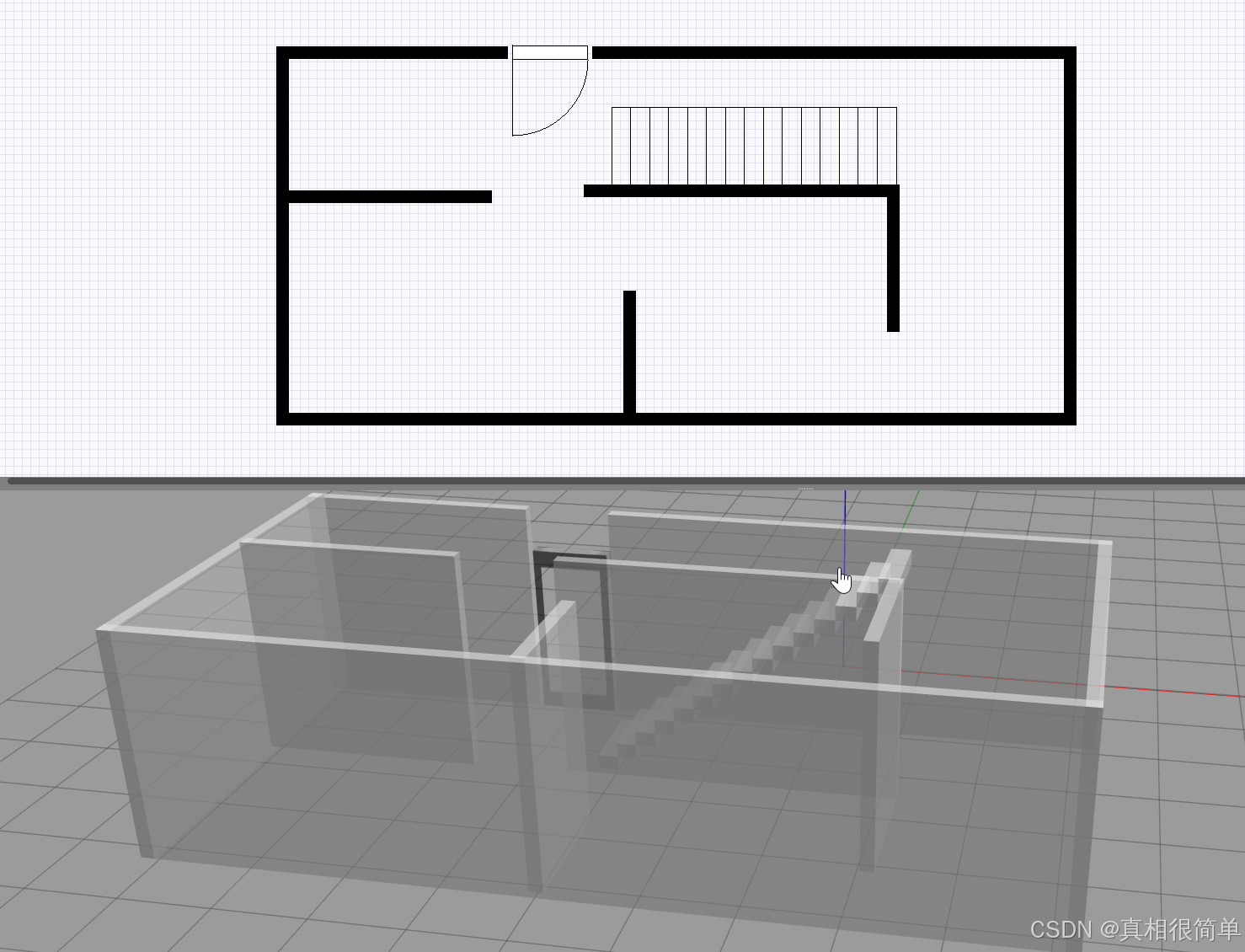
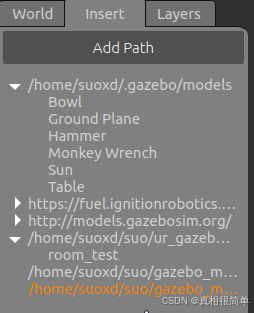
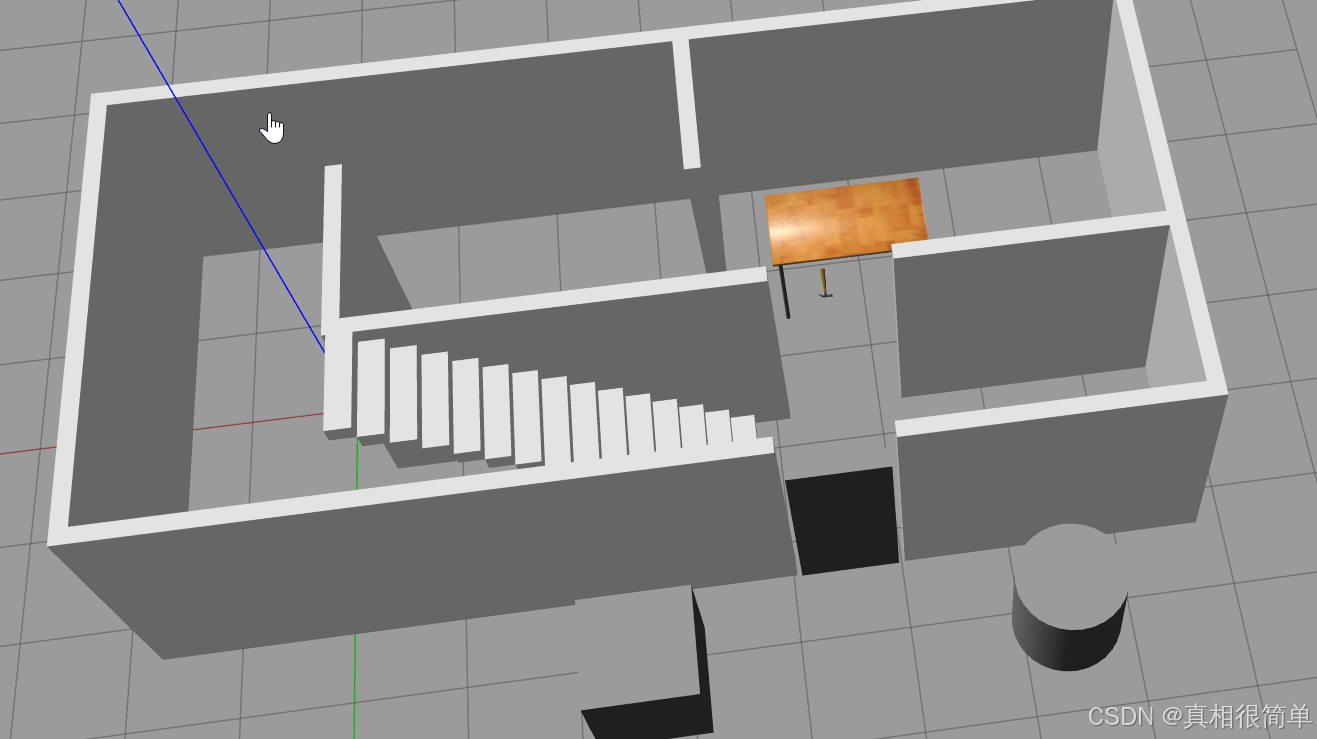
1. 启动仿真 ros2 launch gazebo_ros gazebo.launch.py 2. 菜单构建世界 3. 引入自定义模型/世界 4. 顶部拖拽立体模型 5. 最终效果 查看全文 http://www.dtcms.com/a/62681.html 相关文章: VSCode-Server 在 Linux 容器中的手动安装指南 【技海登峰】Kafka漫谈系列(八)Controller:Zookeeper模式与KRaft模式 山东2025年网络管理员报名工作经验要求与所需材料 无标签数据增强+高效注意力GAN:基于CARLA的夜间车辆检测精度跃升 责任链模式的C++实现示例 项目中async和await的应用场景 PHPCMS V9 登录加密改造 【redis】应用场景:共享会话和手机验证码 Quickwit+Jaeger+Prometheus+Grafana搭建Java日志管理平台 使用AI一步一步实现若依前端(7) Flutter 基础组件 Text 详解 工作记录 2017-01-05 算法面试题深度解析:LeetCode 2012.数组元素的美丽值求和计算与多方案对比 【深度学习】读写文件 LiveGBS流媒体平台GB/T28181常见问题-视频流安全控制HTTP接口鉴权勾选流地址鉴权后401Unauthorized如何播放调用接口流地址校验 Web开发-PHP应用TP框架MVC模型路由访问模版渲染安全写法版本漏洞 echarts geo3D地图标记点自定义照片 Android StrictMode 使用与原理深度解析 Android : Camera之CHI API DeFi基石ERC4626标准实现一个金库合约 [GHCTF 2025](>﹏<) Manus AI:多语言手写识别的技术革命与未来图景 Java 大视界 -- Java 大数据在智能医疗药品研发数据分析与决策支持中的应用(126) linux下的网络抓包(tcpdump)介绍 网络基础概述2 入门到入土,Java学习 day16(算法1) 【2025】AWVS安装保姆级教程(最新25.1.2可用) HEC-HMS水文建模全解析:气候变化与极端水文、离散化流域单元精准刻画地表径流、基流与河道演进过程 STM32全系大阅兵(2) 七层协议攻防实战:从HTTP慢速攻击到DNS隧道检测