力扣-环形链表
核心思路
判断链表是否有环的核心思路是 “利用速度差来制造相遇”。
我们将这个思想应用到链表上:
定义两个指针,一个 慢指针 (slow) 和一个 快指针 (fast)。慢指针每次只移动一步,快指针每次移动两步。如果链表 没有环,快指针会比慢指针先到达链表的末尾(NULL)。
如果链表 有环,快指针会进入环内并开始 “兜圈子”。由于它的速度比慢指针快,它最终一定会在环内的某个节点 “追上” 慢指针。
结论:如果在遍历过程中,快慢指针指向了同一个节点,就说明链表有环。
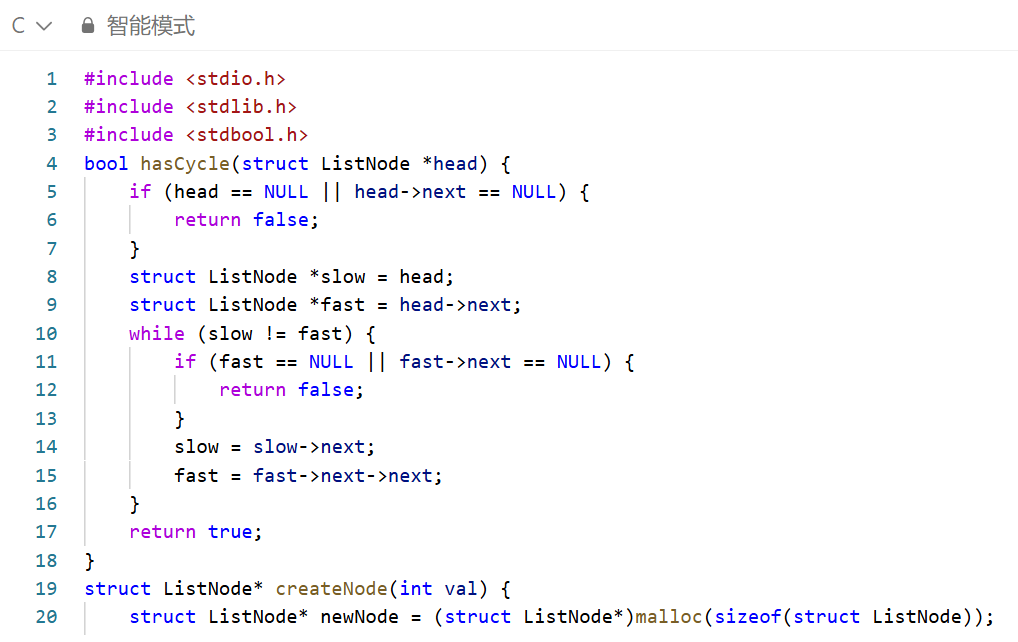
方法:快慢指针法 (Floyd's Tortoise and Hare Algorithm)
这是解决此问题最经典、最高效的方法,也被称为 “Floyd 判圈算法”。
初始化:
慢指针 slow 和快指针 fast 都指向链表的头节点 head。
为了算法启动,可以将 slow 初始化为 head,fast 初始化为 head->next,这样可以避免初始状态下 slow == fast。
遍历与移动:
进入一个循环,循环的条件是 slow != fast。
在循环内部,慢指针 slow 向前移动一步 (slow = slow->next)。
快指针 fast 向前移动两步 (fast = fast->next->next)。
关键检查:在移动快指针之前,必须先检查 fast 和 fast->next 是否为 NULL。如果是,则说明链表走到了尽头,不存在环。
判断结果:
如果循环因为 slow == fast 而退出,说明两个指针在环内相遇,链表存在环,返回 true。
如果循环因为快指针到达 NULL 而退出,链表不存在环,返回 false。
优点
快慢指针法之所以被推崇,是因为它具有显著的优点:
时间效率高:
时间复杂度为 O(n)。其中 n 是链表节点的数量。如果链表无环,快指针会在 n/2 步内到达末尾。如果链表有环,两个指针相遇的时间取决于环的长度,最坏情况下为 O(n)。
空间效率极高:
空间复杂度为 O(1)。
该算法只使用了两个额外的指针,不占用任何与链表长度成比例的额外存储空间。这使得它在处理大规模数据时非常节省内存。
实现简洁优雅:
算法逻辑直观,代码实现简单,只需要一个循环和几个指针操作。
结论
正确性:快慢指针法是判断链表是否存在环的 正确且可靠 的方法。其正确性基于一个简单的事实:在一个封闭的环内,速度快的物体必然会追上速度慢的物体。
最优性:在时间和空间复杂度上,快慢指针法都是解决该问题的 最优解法。它完美地平衡了时间和空间开销。
适用性:该方法不仅可以判断是否存在环,还可以进一步用于 寻找环的入口节点 和 计算环的长度,是处理链表环相关问题的基石。
总结:对于 “判断链表是否有环” 这一问题,快慢指针法(Floyd's Algorithm)是首选的、标准的解决方案,因为它高效、节省空间且易于实现。