卡尔曼学习笔记
卡尔曼滤波
比较好的学习资源:(47 封私信 / 74 条消息) 深入浅出理解卡尔曼滤波【实例、公式、代码和图】 - 知乎
这一篇文章中的参考文献:
(47 封私信 / 74 条消息) 如何通俗并尽可能详细地解释卡尔曼滤波? - 知乎
矩阵微分与求导精讲-CSDN博客
卡尔曼滤波公式及参数详解_卡尔曼滤波参数-CSDN博客
(47 封私信 / 74 条消息) 如何直观地理解「协方差矩阵」? - 知乎
(47 封私信 / 74 条消息) [易懂]如何理解那个把嫦娥送上天的卡尔曼滤波算法Kalman filter? - 知乎
在up主“司南牧(李韬)”文章中还提到其他几篇
(47 封私信 / 74 条消息) 如何通俗并尽可能详细地解释卡尔曼滤波? - 知乎
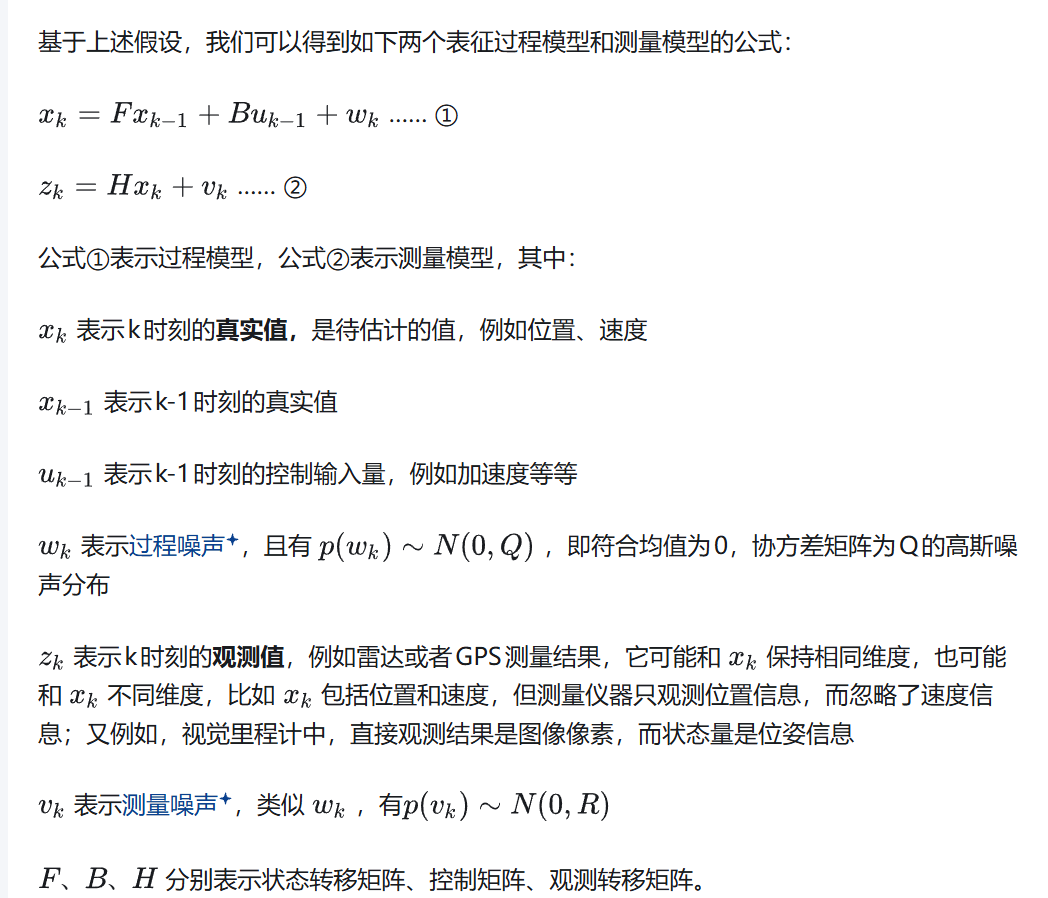
过程模型,真实模型
测量模型,测量传感器得到的结果,测量值乘以系数可以得到观测值
一种方式是:从预估值角度出发。
导弹需要每隔一秒开雷达测量下离目标的距离,由于雷达有误差,所以需要融合自己上个时刻的位置、速度等信息更准确地确定当前时刻离目标的距离。
首先导弹已知“当前这秒雷达测量的导弹离目标的距离(观测值,比如雷达直接测量导弹离目标距离7m)”、”上个时刻导弹离目标距离“和”导弹自己当前时刻的速度“三个数据。
根据”上个时刻导弹离目标距离“和”导弹自己当前时刻的速度“可以估算出当前导弹离目标的距离(估计值)。比如上一秒离目标15m,速度是5m/s,这秒距离就是10m
卡尔曼滤波怎么做?
- 根据上一秒导弹的位置 和 导弹的的速度估计出当前时刻导弹的位置粗略估计值。
- 将雷达测得导弹位置测量值和我们计算出的导弹位置粗略估计值根据这两种数据可信度来进行线性加权和得到准确的导弹位置估计值。