【用户心得】SCANeR™Studio学习笔记(二):深挖AD/ADAS Pack——从传感器到场景的闭环验证
目录
1. 高保真传感器仿真套件:逼真度超乎预期
2. 核心优势:可视化、可扩展、全流程
3. 强大的场景测试能力:让验证有的放矢
小结
这期笔记,我想具体分享一下我花最多时间研究的核心模块——AD/ADAS Pack。这个工具包是SCANeR平台针对自动驾驶与辅助驾驶功能验证开发的核心工具包,它所提供的不仅仅是一组传感器模型,更是一套从感知仿真到场景测试的完整、闭环工作流,实实在在地帮我们解决了做自动驾驶仿真测试验证时的很多关键问题。
1. 高保真传感器仿真套件:逼真度超乎预期
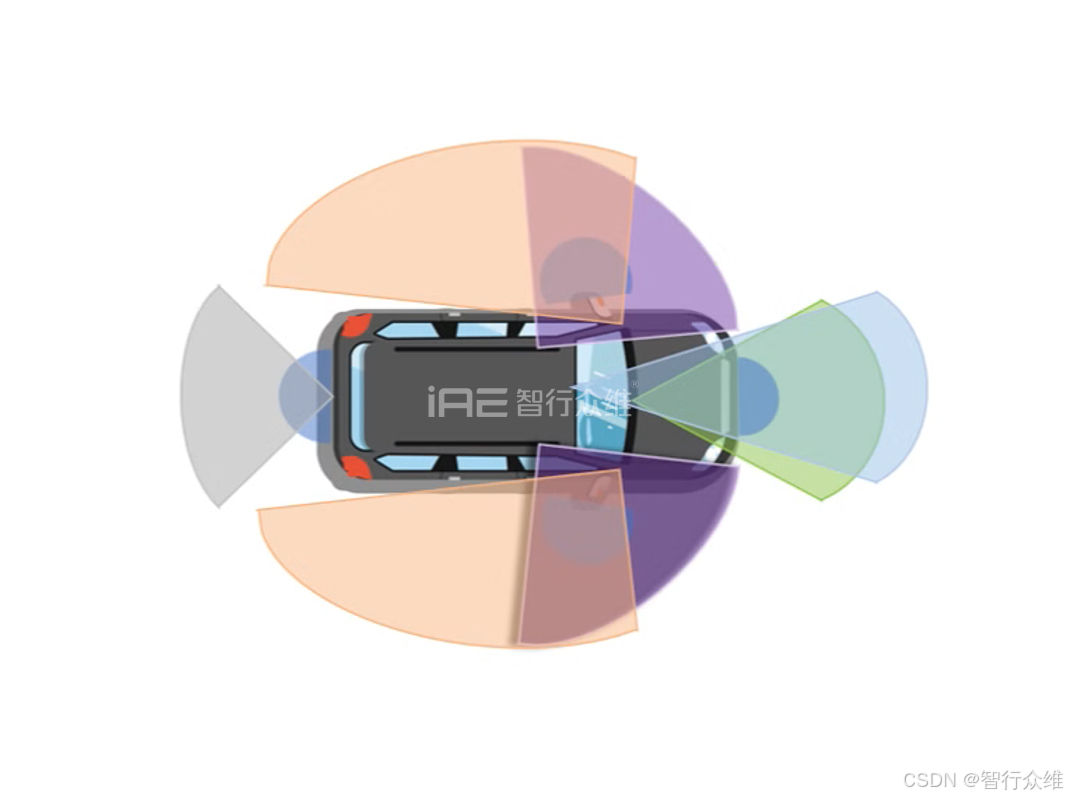
首先,AD/ADAS Pack提供了一套非常全面的高保真传感器模型,基本覆盖了汽车上所有的主流感知部件。但让我觉得特别“香”的,是它的仿真深度。
传感器阵容:激光雷达、摄像头、雷达、超声波传感器、照明传感器以及电子地平线传感器(支持ADASIS格式检索)。
建模的极致逼真度:
摄像头:得益于Unreal Engine 5的渲染能力,它能生成照片级的图像。更神奇的是,它支持鱼眼相机模型,并能模拟各种真实物理效应,如太阳眩光、沙尘暴、镜头裂纹、树叶遮挡乃至ISP(图像信号处理)故障,对于训练和验证感知算法的鲁棒性至关重要,只有在模拟环境里多踩坑,才能在实车路上少踩雷。

激光雷达/雷达:可以模拟多个实例,数量上限基本取决于你的GPU/CPU算力,这对于做传感器融合和极端情况下的压力测试非常有用。
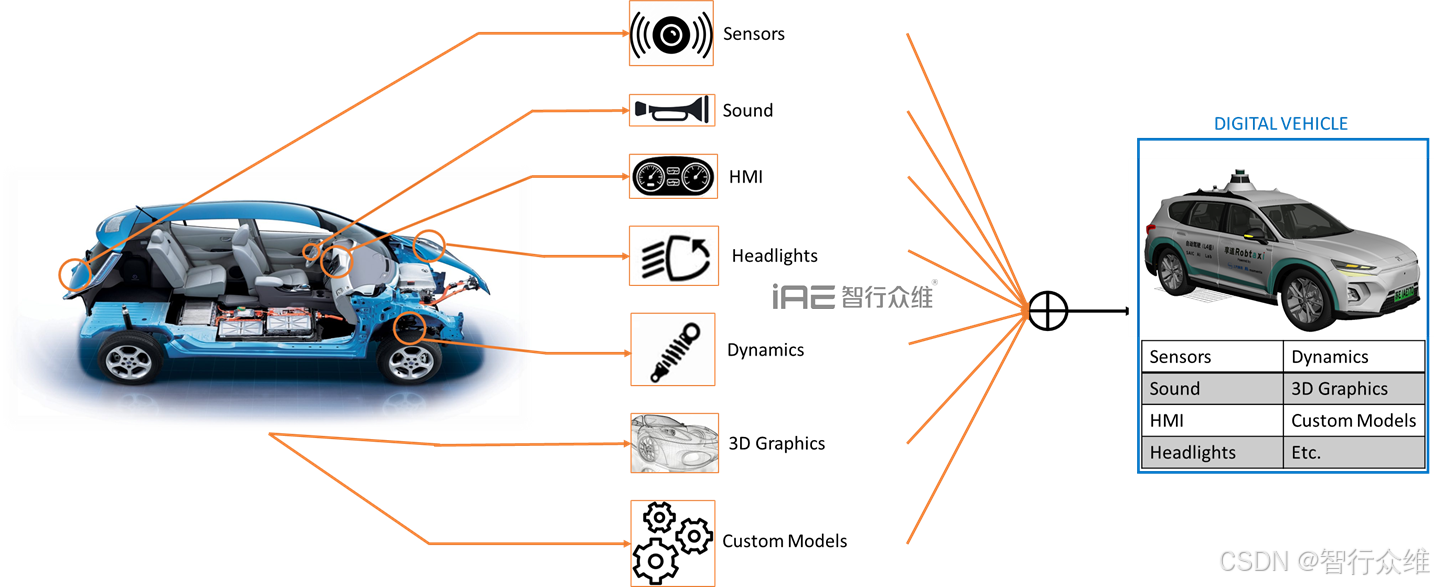
所有这些传感器,都被很好地整合进了“数字车辆”中。“数字车辆”作为一个集成化的载体,意味着你可以通过DVE文件统一定义车辆的动力学、传感器、图形、声学等属性,极大地便利了模型的构建、版本管理及团队协作。
2. 核心优势:可视化、可扩展、全流程
调试利器——传感器查看器:我这里必须要单独夸一下这个功能,它真的太实用了。它可以实时可视化各个传感器的检测结果。比如,摄像头看到了什么,激光雷达点云识别出了哪些障碍物,都能实时显示。这对于算法调试和问题定位来说,效率提升了不止一个量级。
分布式部署与性能优化:SCANeR的传感器可以分布式部署在多台计算机上。这意味着你可以将计算负载分摊,用多台机器的算力来支撑超大规模的传感器仿真,保证了仿真的实时性和高保真度。
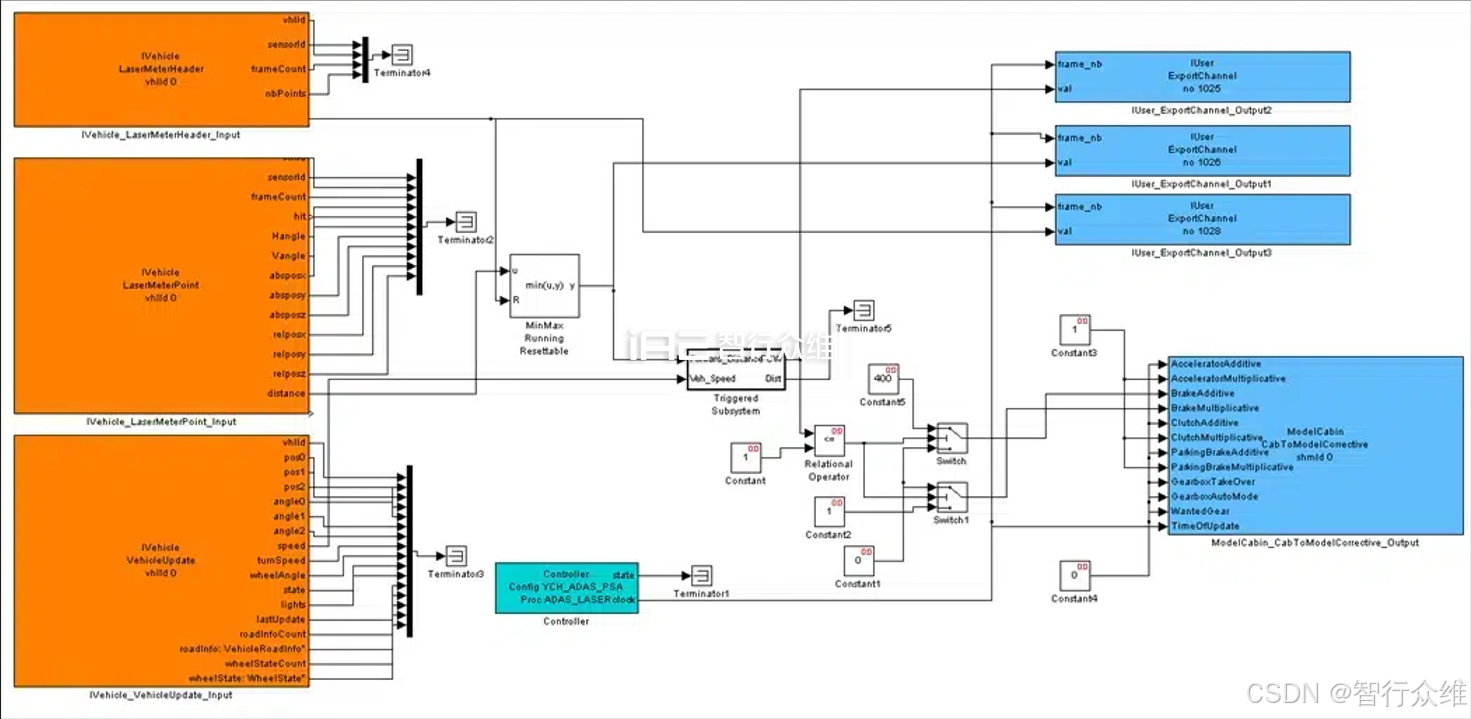
卓越的集成灵活性:工具包可以通过ROS, RTMaps, Python, C/C++, MATLAB/Simulink 等标准化接口与传感器通信。这让我们团队能够轻松地将自己开发的感知算法或商用软件集成到仿真环路中,几乎没有任何障碍。
全流程覆盖,模型一致:和SCANeR平台的理念一脉相承,这个工具包同样适用于MIL(模型在环)、SIL(软件在环)、HIL(硬件在环)、VIL(车辆在环)、DIL(驾驶员在环)所有测试阶段,保证了传感器模型从早期设计到最终整车测试的一致性。
3. 强大的场景测试能力:让验证有的放矢
工具包的价值最终要落在测试上。它完美地继承了SCANeR强大的场景构建能力:
支持OpenScenario:这意味着我可以轻松地导入和使用行业标准的场景文件,或者将仿真的复杂场景导出共享,极大地提升了工作的兼容性和效率。
多样化的场景生成方式:无论是基于轨迹复现真实驾驶数据,还是通过API控制SUMO生成交通流,或是使用内置脚本创建复杂的“故事型”场景(如频繁的Cut-in/Cut-out),都能满足。这为测试AEB(自动紧急制动)、ACC(自适应巡航)、LKA(车道保持辅助)等系统提供了近乎无限的已知与未知场景库,特别是针对SOTIF(预期功能安全)的研究,帮助巨大。
小结:
深入学习AD/ADAS Pack后,我认识到它的强大之处在于构建了一个高保真、可扩展、且与开发流程深度集成的虚拟验证环境。它不仅仅提供了仿真的“零件”,更是提供了将这些零件组装起来并发挥效能的“图纸”和“流水线”。
对于专注于ADAS/AD系统验证的工程师而言,这个工具包能显著提升测试的深度、广度和效率,是实现“左移测试”和保障功能安全的坚实基石。