【05】方向梯度直方图(HOG)详解:从原理到实现
简介
方向梯度直方图(Histogram of Oriented Gradients, HOG)是计算机视觉领域经典的目标检测特征描述子,由法国研究员Dalal等人于2005年CVPR会议提出,最初用于解决行人检测问题。其核心思想可概括为:目标的局部形状与表象,能通过边缘/轮廓的梯度方向密度分布有效刻画——将图像划分为多个局部区域(cell),统计每个区域内像素的梯度方向直方图,再通过归一化与拼接形成全局特征向量。HOG因出色的形状描述能力,至今仍是目标检测、图像识别任务的基础工具之一。
算法流程:从像素到特征向量的五步拆解
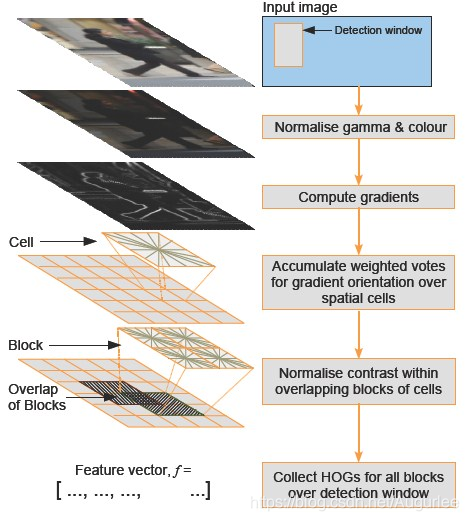
HOG特征提取的核心逻辑是“局部梯度统计+归一化”,具体分为五大步骤(流程如图1):
1. 灰度化与Gamma校正:抵消光照干扰
光照变化是计算机视觉的常见噪声(如阴影、过曝),HOG通过两步预处理降低其影响:
(1)灰度化
HOG聚焦梯度信息(边缘/轮廓的本质是梯度突变),而色彩对形状描述无贡献。将RGB图像转换为灰度图的公式为:Gray=0.3×R+0.59×G+0.11×BGray = 0.3 \times R + 0.59 \times G + 0.11 \times BGray=0.3×R+0.59×G+0.11×B(权重基于人眼对绿光更敏感的视觉特性,确保灰度图保留足够的形状信息。)
(2)Gamma校正
通过幂运算调整图像亮度,抵消局部光照不均。常用平方根法(γ=0.5\gamma=0.5γ=0.5),公式为:I′(x,y)=I(x,y)γI'(x,y) = I(x,y)^\gammaI′(x,y)=I(x,y)γ
- 当γ<1\gamma<1γ<1时,图像整体变暗,突出暗部细节;
- 当γ>1\gamma>1γ>1时,图像整体变亮,突出亮部细节。
2. 计算梯度:捕捉边缘的“强度与方向”
梯度是HOG的核心信息——它同时反映像素的“边缘强度”(梯度大小)与“边缘方向”(梯度方向)。HOG采用简单差分算子计算梯度:
- 水平梯度(GxG_xGx):捕捉垂直边缘(如物体的左右轮廓),算子为[−1,0,1][-1, 0, 1][−1,0,1](左像素减右像素);
- 垂直梯度(GyG_yGy):捕捉水平边缘(如物体的上下轮廓),算子为[−1,0,1]T[-1, 0, 1]^T[−1,0,1]T(上像素减下像素)。
对每个像素(x,y)(x,y)(x,y),计算梯度大小GGG与方向角θ\thetaθ:G=Gx2+Gy2G = \sqrt{G_x^2 + G_y^2}G=Gx2+Gy2θ=arctan2(Gy,Gx)\theta = \arctan2(G_y, G_x)θ=arctan2(Gy,Gx)(arctan2\arctan2arctan2确保方向角范围为[−π,π][-π, π][−π,π],对应0°~360°的物理方向。)
3. 统计cell的梯度方向直方图:局部形状的“直方图表达”
将灰度图划分为多个cell(如8×8像素的正方形区域),每个cell内的梯度方向被量化为 bins(通常9个,对应0°、20°、…、160°,每20°一个bin)。
对cell内每个像素,根据其梯度方向θ\thetaθ归属到对应的bin,并将梯度大小GGG作为“权重”加到该bin的计数中。例如:
- 若某像素的梯度方向为30°,则加到“20°~40°”的bin中;
- 若梯度大小为5,则该bin的计数加5。
最终,每个cell生成一个长度为nbinsnbinsnbins(如9)的直方图向量,示例如图2:
【在此处插入cell梯度直方图示意图:8×8 cell的9-bin梯度方向分布】
4. Block块内归一化:消除光照强度的影响(重点)
cell直方图仍受光照强度干扰(如亮区域的梯度大小普遍更大),需通过Block归一化抵消这种差异。Block是由多个cell组成的重叠区域(如2×2 cell,即16×16像素),步长通常为1个cell(重叠率50%)。
对每个Block内的所有cell直方图向量拼接成的长向量vvv,采用L2归一化处理(最常用的方式):vnorm=v∥v∥22+ϵv_{\text{norm}} = \frac{v}{\sqrt{\|v\|_2^2 + \epsilon}}vnorm=∥v∥22+ϵv(ϵ=1e−5\epsilon=1e-5ϵ=1e−5,避免分母为0;∥v∥2\|v\|_2∥v∥2是向量的L2范数,即各元素平方和的平方根。)
归一化后的Block特征对光照变化更鲁棒,是HOG性能的关键保障——例如,同一物体在亮处与暗处的梯度大小不同,但归一化后的直方图形状一致。
5. 生成HOG特征:拼接所有Block的归一化向量
将图像中所有Block的归一化直方图向量按空间顺序拼接,形成最终的HOG特征向量。以64×128像素的行人图像为例:
- cell大小8×8 → 图像分为64/8×128/8=8×1664/8 × 128/8 = 8×1664/8×128/8=8×16个cell;
- Block大小2×2 cell → Block数量为(8−1)×(16−1)=7×15(8-1)×(16-1)=7×15(8−1)×(16−1)=7×15(步长1 cell);
- 每个Block特征长度为2×2×9=362×2×9=362×2×9=36 → 总特征长度为7×15×36=37807×15×36=37807×15×36=3780。
HOG特征的优缺点:适合什么场景?
HOG的设计逻辑决定了它的优势与局限,需根据任务场景选择:
优点
- 形状刻画精准:直接以梯度方向分布描述目标局部形状,契合边缘/轮廓的视觉本质;
- 抗干扰能力强:位置与方向量化抑制小范围平移/旋转,局部归一化抵消光照变化;
- 维度合理:忽略色彩信息,特征维度远低于原始图像(如64×128图像仅3780维);
- 局部关系保留:分块分cell的结构,保留了像素间的局部空间关系(如“眼睛在鼻子上方”的位置信息)。
缺点
- 实时性差:多步骤流程(尤其Block归一化)导致特征生成速度慢,难用于实时检测;
- 遮挡敏感:依赖完整的局部梯度分布,遮挡会破坏直方图的连续性(如行人被遮挡后,HOG特征无法完整描述人体形状);
- 噪点敏感:梯度对孤立噪点的响应强,易干扰直方图统计(如椒盐噪声会产生虚假梯度);
- 无颜色信息:仅用灰度图,丢失颜色带来的目标区分度(如红色汽车与蓝色汽车的HOG特征可能相似)。
OpenCV实现HOG特征提取:从理论到代码
OpenCV提供cv2.HOGDescriptor类,封装了HOG特征提取的所有步骤,只需设置关键参数即可快速使用。
关键参数说明
| 参数 | 含义 | 常用值 |
|---|---|---|
| `winSize` | 检测窗口大小(需与训练数据一致) | (64, 128) |
| `blockSize` | Block大小(需是cellSize的整数倍) | (16, 16) |
| `blockStride` | Block步长(重叠率=1 - 步长/blockSize) | (8, 8) |
| `cellSize` | cell大小 | (8, 8) |
| `nbins` | 梯度方向 bins 数量 | 9 |
代码示例:提取行人图像的HOG特征
import cv2
import numpy as np# 1. 读取并预处理图像(转为灰度图+ resize到检测窗口大小)
img = cv2.imread('pedestrian.jpg', 0) # 0表示灰度模式
img_resized = cv2.resize(img, (64, 128)) # 调整为64×128像素# 2. 初始化HOG描述符
hog = cv2.HOGDescriptor(winSize=(64, 128), # 检测窗口大小blockSize=(16, 16), # Block大小(2×2 cell)blockStride=(8, 8), # Block步长(重叠50%)cellSize=(8, 8), # cell大小nbins=9 # 9个梯度方向bin
)# 3. 计算HOG特征
hog_features = hog.compute(img_resized)# 输出特征维度(64×128图像的HOG特征长度为3780)
print("HOG特征维度:", hog_features.shape) # 输出:(3780, 1)
总结
HOG是**“用局部梯度分布描述形状”**的经典方法,其核心优势在于“聚焦形状本质+抗光照干扰”。尽管深度学习时代(如YOLO、Faster R-CNN)的特征提取能力更强,但HOG的思想仍值得学习——它揭示了计算机视觉的本质:从像素中提取“有意义的统计信息”。
无论是行人检测、车牌识别还是物体分类,HOG都是理解“特征提取”的重要起点。结合SVM分类器,HOG曾是行人检测的“黄金组合”;即使在今天,HOG仍可作为传统计算机视觉方法的基准,帮助我们理解深度学习特征的底层逻辑。