从零开始学习PX4源码30(定高(ALTITUDE)模式)
目录
文章目录
- 目录
- 1.定高模式简介
- 2.如何设置定高模式
- 3.定高模式用到的主要参数
- 4.定高模式整体状态
- 5.定高模式代码流程
-
- 5.1 定高模式初始化
- 5.2 更新定高模式
-
- 5.2.1 更新定高模式
- 5.2.2 两种模式的细节分析
- 6.定高模式控制流程
- 7.总结
本节主要讲解PX4的定高模式的整体流程,重点以气压计作为高度输入源作为讲解,关于其他高度源的暂时不是本节重点,读者可以自行查阅相关资料,欢迎批评指正!!!
1.定高模式简介
高度模式是一个相对容易飞的遥控模式,横滚和俯仰杆控制飞机在左右和前后方向上的运动(相对于飞机的“前部”),偏航杆控制水平面上的旋转速度,油门控制上升 -下降的速度。当杆被释放/回中时,飞机将恢复水平并保持当前的高度。 如果在水平面上运动,飞机将继持续运动直到任何动量被风阻力消散。 如果刮风,飞机会向风的方向漂移。
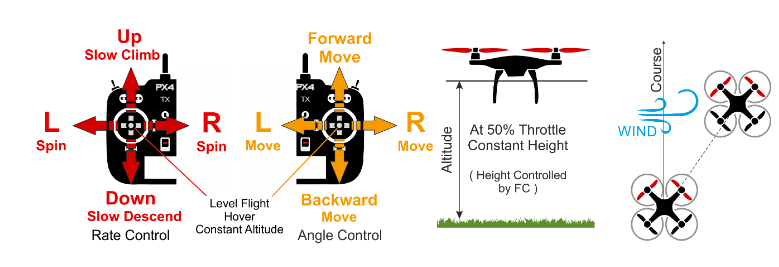
这里需要注意apm的是PVA(垂直位置,垂直速度,垂直加速度)控制,而PX4主要是通过控制速度实现高度的稳定,也就是油门杆不在中立点时,飞机仅通过速度进行控制,当油门回中后,飞机将会按照期望的衰减速度衰减到预设的速度范围内及一定的加速度范围内进行锁定高度(这个可以理解成垂直方向的刹车过程)。
2.如何设置定高模式
设置定高模式有两种方式:
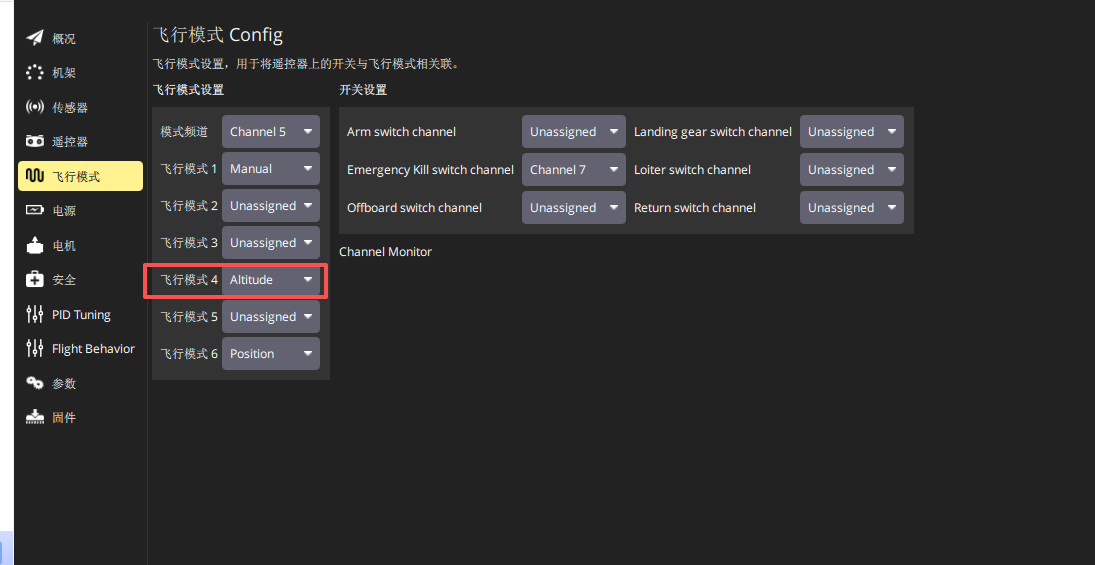
1.打开QGC,通过USB链接飞控后,可以看到如下界面:
2.通过全部参数直接修改模式