线性代数 - 3 阶方阵的行列式 可视化
线性代数 - 3 阶方阵的行列式
flyfish
只有方阵(行数与列数相等的矩阵)才有行列式。
2×2行列式表示平行四边形的面积
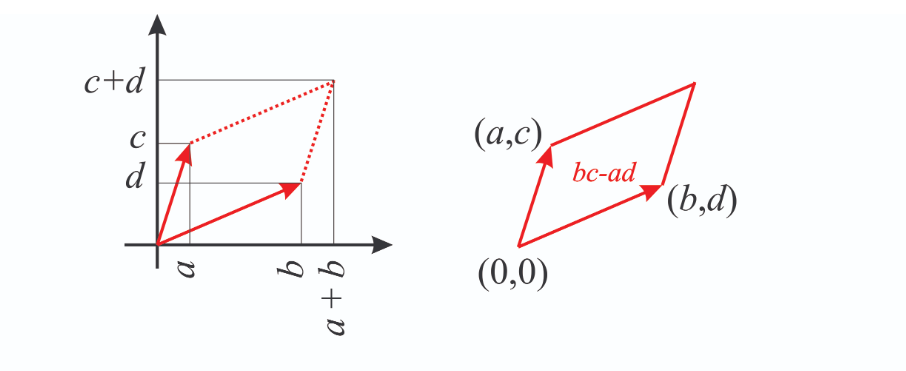
这里有详细的可视化过程
3×3行列式,其绝对值表示平行六面体的体积。
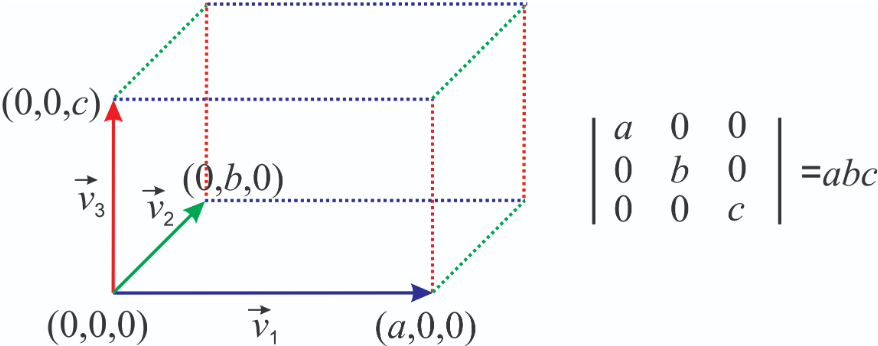
1. 长方体
三个向量 v1⃗=(a,0,0)\vec{v_1} = (a,0,0)v1=(a,0,0)、v2⃗=(0,b,0)\vec{v_2} = (0,b,0)v2=(0,b,0)、v3⃗=(0,0,c)\vec{v_3} = (0,0,c)v3=(0,0,c) 分别沿x、y、z轴方向延伸,张成一个长方体。
根据长方体体积公式,其体积为:
体积=长×宽×高=a×b×c\text{体积} = \text{长} \times \text{宽} \times \text{高} = a \times b \times c 体积=长×宽×高=a×b×c
2. 矩阵与行列式部分(对角矩阵)
由这三个向量构成的3×3矩阵是对角矩阵:
∣a000b000c∣\begin{vmatrix} a & 0 & 0 \\ 0 & b & 0 \\ 0 & 0 & c \end{vmatrix} a000b000c
对角矩阵的行列式等于主对角线元素的乘积,因此:
行列式值=a×b×c\text{行列式值} = a \times b \times c 行列式值=a×b×c
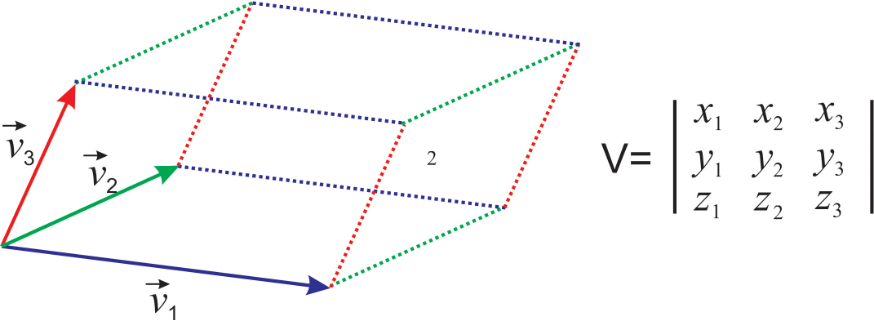
平行六面体
三个向量 v1⃗、v2⃗、v3⃗\vec{v_1}、\vec{v_2}、\vec{v_3}v1、v2、v3 从同一起点出发,“拉伸”后围成一个平行六面体。
行列式
若三个向量的坐标分别为 v1⃗=(x1,y1,z1)\vec{v_1}=(x_1,y_1,z_1)v1=(x1,y1,z1)、v2⃗=(x2,y2,z2)\vec{v_2}=(x_2,y_2,z_2)v2=(x2,y2,z2)、v3⃗=(x3,y3,z3)\vec{v_3}=(x_3,y_3,z_3)v3=(x3,y3,z3),则平行六面体的体积 VVV 满足:
V=∣∣x1x2x3y1y2y3z1z2z3∣∣V = \left| \begin{vmatrix} x_1 & x_2 & x_3 \\ y_1 & y_2 & y_3 \\ z_1 & z_2 & z_3 \end{vmatrix} \right| V=x1y1z1x2y2z2x3y3z3
V=∣h∣∥a×b∥=∥c∥∣cos(θ)∣∥a×b∥=∣c⋅(a×b)∣V = |h| \|\mathbf{a} \times \mathbf{b}\| = \|\mathbf{c}\| |\cos(\theta)| \|\mathbf{a} \times \mathbf{b}\| = |\mathbf{c} \cdot (\mathbf{a} \times \mathbf{b})|V=∣h∣∥a×b∥=∥c∥∣cos(θ)∣∥a×b∥=∣c⋅(a×b)∣
上面式子的由来
3阶行列式
1. 基于三维向量的行列式
在三维空间R3\mathbb{R}^3R3中,三个有序向量a\mathbf{a}a、b\mathbf{b}b、c\mathbf{c}c的行列式定义为标量三重积:
det(a,b,c)=a⋅(b×c)\det(\mathbf{a}, \mathbf{b}, \mathbf{c}) = \mathbf{a} \cdot (\mathbf{b} \times \mathbf{c}) det(a,b,c)=a⋅(b×c)
其中:
b×c\mathbf{b} \times \mathbf{c}b×c是叉积(结果为垂直于b\mathbf{b}b、c\mathbf{c}c平面的向量,模长等于b\mathbf{b}b、c\mathbf{c}c张成的平行四边形面积);
a⋅(b×c)\mathbf{a} \cdot (\mathbf{b} \times \mathbf{c})a⋅(b×c)是点积(结果为标量,其绝对值等于a\mathbf{a}a、b\mathbf{b}b、c\mathbf{c}c张成的平行六面体体积)。
2. 基于3×3矩阵的行列式
若将三个向量a\mathbf{a}a、b\mathbf{b}b、c\mathbf{c}c作为列向量构成3×3矩阵:
A=(abc)=(a1b1c1a2b2c2a3b3c3)A = (\mathbf{a}\ \mathbf{b}\ \mathbf{c}) = \begin{pmatrix} a_1 & b_1 & c_1 \\ a_2 & b_2 & c_2 \\ a_3 & b_3 & c_3 \end{pmatrix} A=(a b c)=a1a2a3b1b2b3c1c2c3
则该矩阵的行列式为:
detA=∣a1b1c1a2b2c2a3b3c3∣=a⋅(b×c)\det A = \begin{vmatrix} a_1 & b_1 & c_1 \\ a_2 & b_2 & c_2 \\ a_3 & b_3 & c_3 \end{vmatrix} = \mathbf{a} \cdot (\mathbf{b} \times \mathbf{c}) detA=a1a2a3b1b2b3c1c2c3=a⋅(b×c)
3阶行列式既可以理解为“三个三维向量的标量三重积”,也可以理解为“由这三个向量作为列(或行)构成的3×3矩阵的行列式”,其数值本质是这三个向量张成的平行六面体的体积的代数度量(符号反映定向,绝对值是体积)。
3阶行列式的“拉普拉斯展开,将3阶行列式分解为3个2阶行列式的线性组合,并通过标量三重积验证其正确性
1. 3阶行列式的按列展开(拉普拉斯展开)
3阶行列式按第一列展开:
∣a1b1c1a2b2c2a3b3c3∣=a1∣b2c2b3c3∣−a2∣b1c1b3c3∣+a3∣b1c1b2c2∣\begin{vmatrix} a_1 & b_1 & c_1 \\ a_2 & b_2 & c_2 \\ a_3 & b_3 & c_3 \end{vmatrix} = a_1 \begin{vmatrix} b_2 & c_2 \\ b_3 & c_3 \end{vmatrix} - a_2 \begin{vmatrix} b_1 & c_1 \\ b_3 & c_3 \end{vmatrix} + a_3 \begin{vmatrix} b_1 & c_1 \\ b_2 & c_2 \end{vmatrix} a1a2a3b1b2b3c1c2c3=a1b2b3c2c3−a2b1b3c1c3+a3b1b2c1c2
每一项的结构:第一列的元素 × 对应的2阶余子式 × 符号(由行号+列号的奇偶性决定,第一列列号为1,故符号为(−1)i+1(-1)^{i+1}(−1)i+1,即a1a_1a1正、a2a_2a2负、a3a_3a3正)。
展开为多项式:将2阶行列式按“mq−npmq - npmq−np”公式展开后,得到:
a1b2c3−a1b3c2−a2b1c3+a2b3c1+a3b1c2−a3b2c1a_1b_2c_3 - a_1b_3c_2 - a_2b_1c_3 + a_2b_3c_1 + a_3b_1c_2 - a_3b_2c_1 a1b2c3−a1b3c2−a2b1c3+a2b3c1+a3b1c2−a3b2c1
这与3阶行列式的对角线法则结果完全一致。
2. 通过标量三重积验证
证明通过标量三重积(点积与叉积的结合)验证展开式的正确性:
设向量a=(a1,a2,a3)\mathbf{a} = (a_1, a_2, a_3)a=(a1,a2,a3),b=(b1,b2,b3)\mathbf{b} = (b_1, b_2, b_3)b=(b1,b2,b3),c=(c1,c2,c3)\mathbf{c} = (c_1, c_2, c_3)c=(c1,c2,c3)。
先计算叉积b×c\mathbf{b} \times \mathbf{c}b×c:
b×c=(b2c3−b3c2b3c1−b1c3b1c2−b2c1)\mathbf{b} \times \mathbf{c} = \begin{pmatrix} b_2c_3 - b_3c_2 \\ b_3c_1 - b_1c_3 \\ b_1c_2 - b_2c_1 \end{pmatrix} b×c=b2c3−b3c2b3c1−b1c3b1c2−b2c1
再计算点积a⋅(b×c)\mathbf{a} \cdot (\mathbf{b} \times \mathbf{c})a⋅(b×c):
a⋅(b×c)=a1(b2c3−b3c2)−a2(b1c3−b3c1)+a3(b1c2−b2c1)\mathbf{a} \cdot (\mathbf{b} \times \mathbf{c}) = a_1(b_2c_3 - b_3c_2) - a_2(b_1c_3 - b_3c_1) + a_3(b_1c_2 - b_2c_1) a⋅(b×c)=a1(b2c3−b3c2)−a2(b1c3−b3c1)+a3(b1c2−b2c1)
展开后与行列式展开的多项式形式完全一致,从而证明了按列展开的公式是正确的。将3阶行列式分解为3个2阶行列式的线性组合(拉普拉斯展开),并通过标量三重积的代数运算验证其正确性。即通过递归,将n阶行列式分解为n个(n-1)阶行列式的组合。
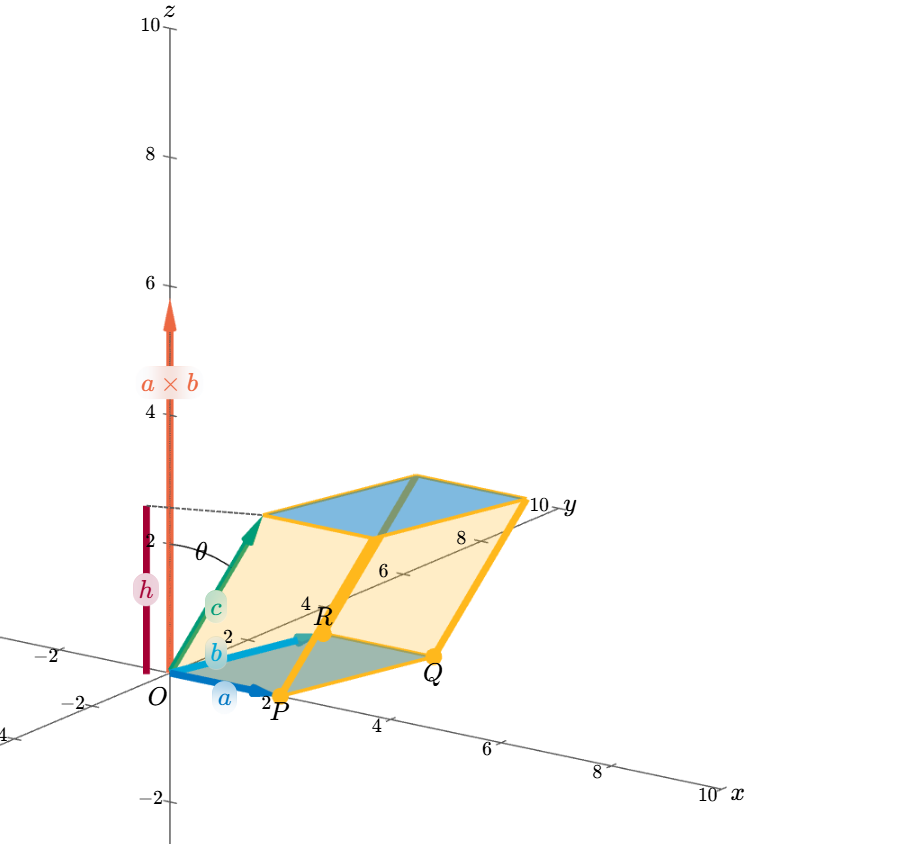
平行六面体的体积与行列式的关系,是“底面积(叉积的模长)× 高度(向量的投影)= 体积”
向量 a⃗\vec{a}a、b⃗\vec{b}b:在底面(X-Y平面)张成平行四边形 OPQROPQROPQR的两个边向量;
向量 c⃗\vec{c}c:垂直于底面的“高度方向”向量;
向量 a⃗×b⃗\vec{a} \times \vec{b}a×b:a⃗\vec{a}a和 b⃗\vec{b}b的叉积向量,其方向垂直于底面,模长等于底面平行四边形的面积。
高度 hhh:向量 c⃗\vec{c}c在底面法向(即 a⃗×b⃗\vec{a} \times \vec{b}a×b方向)的投影长度,计算公式为:
h=∥c⃗∥⋅cos(0.16π)=2.61h = \|\vec{c}\| \cdot \cos(0.16\pi) = 2.61 h=∥c∥⋅cos(0.16π)=2.61
其中 ∥c⃗∥\|\vec{c}\|∥c∥是向量 c⃗\vec{c}c的模长,0.16π0.16\pi0.16π是 c⃗\vec{c}c与底面法向的夹角,cos(0.16π)\cos(0.16\pi)cos(0.16π)是投影系数。
底面积 A\mathcal{A}A:底面平行四边形 OPQROPQROPQR的面积,等于 a⃗\vec{a}a和 b⃗\vec{b}b叉积的模长:
A=∥a⃗×b⃗∥=5.82\mathcal{A} = \|\vec{a} \times \vec{b}\| = 5.82 A=∥a×b∥=5.82
体积 V\mathcal{V}V:平行六面体的体积 = 底面积 × 高度,即:
V=h⋅A=2.61×5.82=15.2\mathcal{V} = h \cdot \mathcal{A} = 2.61 \times 5.82 = 15.2 V=h⋅A=2.61×5.82=15.2
若将 a⃗、b⃗、c⃗\vec{a}、\vec{b}、\vec{c}a、b、c作为3×3矩阵的列向量,则该矩阵的行列式的绝对值就等于这个平行六面体的体积(即 ∣det(a⃗,b⃗,c⃗)∣=V|\det(\vec{a},\vec{b},\vec{c})| = \mathcal{V}∣det(a,b,c)∣=V)。而推导中,体积又被分解为“叉积的模长(底面积)× 点积的投影(高度)”。