【01】Canny边缘检测:原理、实现与性能对比
简介
本文系统解析Canny边缘检测算法,从其核心理论到Python实现,详细阐述去噪声、梯度计算、非极大值抑制、双阈值检测等关键步骤。同时对比Roberts、Prewitt、Sobel、Laplacian等经典算子,通过实验验证Canny算子在边缘连续性与抗噪声能力上的优势,助你全面掌握这一数字图像处理领域的标杆技术。
1 边缘检测算法的分类与Canny算子的诞生
在数字图像处理中,边缘是指图像局部区域灰度值发生显著变化的部分,是图像分割、目标识别的重要基础。边缘检测算法可大致分为三类:
1.1 基于一阶导数的边缘检测算子
这类算法通过计算图像灰度的一阶导数(梯度)来定位边缘,常用模板(卷积核)与图像进行卷积运算,再通过阈值提取边缘。典型代表有Roberts算子、Prewitt算子和Sobel算子。其核心思想是:梯度幅值较大的区域可能存在边缘,通过设定阈值筛选出显著梯度区域。
1.2 基于二阶导数的边缘检测算子
二阶导数通过“过零点”特性检测边缘,即灰度函数的二阶导数为零的点。拉普拉斯(Laplacian)算子是典型代表,它对噪声敏感,易受噪声干扰导致边缘模糊,且无法区分边缘方向,实际应用中较少单独使用。
1.3 Canny算子:最优边缘检测的标杆
1986年,John F. Canny提出了一种多阶段边缘检测算法——Canny算子,并创立了边缘检测计算理论。该算法以低错误率(不丢失重要边缘,无虚假边缘)、高定位性(边缘位置偏差最小)、最小响应(避免多个响应对应同一边缘) 为评价标准,至今仍是边缘检测领域的标准算法。
2 Canny算子的核心原理与实现步骤
Canny算子的实现可分为五个关键步骤,每个步骤都对最终检测效果有重要影响。
2.1 去噪声:高斯滤波预处理
图像中不可避免存在噪声,而噪声会导致梯度计算出现伪边缘。因此,第一步需通过高斯滤波平滑图像,去除噪声。高斯滤波的核心是用高斯函数作为卷积核与图像卷积,其公式为:G(x,y)=12πσ2e−x2+y22σ2G(x, y) = \frac{1}{2\pi\sigma^2}e^{-\frac{x^2+y^2}{2\sigma^2}}G(x,y)=2πσ21e−2σ2x2+y2其中σ\sigmaσ是高斯核的标准差,核大小通常取3×33\times33×3或5×55\times55×5(核越大,平滑效果越强,噪声抑制越好,但边缘可能模糊)。
2.2 计算梯度:梯度幅值与方向
梯度是图像边缘检测的核心指标,通过Sobel算子计算x方向(水平)和y方向(垂直)的梯度分量,再合成梯度幅值与方向。
- 梯度分量计算:水平梯度Gx=I(x+1,y)−I(x−1,y)G_x = I(x+1,y) - I(x-1,y)Gx=I(x+1,y)−I(x−1,y),垂直梯度Gy=I(x,y+1)−I(x,y−1)G_y = I(x,y+1) - I(x,y-1)Gy=I(x,y+1)−I(x,y−1)(Sobel算子通过加权平均优化邻域像素的影响,减少噪声放大)。
- 梯度幅值:G=Gx2+Gy2G = \sqrt{G_x^2 + G_y^2}G=Gx2+Gy2(或简化为G=∣Gx∣+∣Gy∣G = |G_x| + |G_y|G=∣Gx∣+∣Gy∣,计算更快)。
- 梯度方向:θ=arctan2(Gy,Gx)\theta = \arctan2(G_y, G_x)θ=arctan2(Gy,Gx),通常将方向归为四类:0°(水平)、45°(右上-左下)、90°(垂直)、135°(左上-右下),便于后续非极大值抑制处理。
2.3 非极大值抑制:边缘精确定位
非极大值抑制(NMS)的目标是将模糊的边缘“细化”为单像素宽的线条。具体步骤:
- 根据梯度方向,确定当前像素的梯度方向(如0°对应水平方向);
- 比较当前像素与梯度方向正负方向上像素的梯度幅值,保留幅值最大的像素(即边缘点),其余置为0(非边缘点)。例如,若当前像素梯度方向为135°,则需比较该像素与左上、右下方向像素的梯度幅值,仅保留幅值最大的点。
2.4 双阈值检测:区分强边缘与弱边缘
非极大值抑制后的图像仍存在噪声点,需通过双阈值技术分类边缘:
- 高阈值(T2):大于T2的像素为“强边缘”,必然是真实边缘;
- 低阈值(T1):小于T1的像素为“非边缘”,直接排除;
- T1~T2之间的像素为“弱边缘”,需进一步判断是否与强边缘连通,若连通则保留为边缘,否则排除。
2.5 滞后跟踪:连接弱边缘
滞后跟踪技术通过强边缘作为“种子”,跟踪所有与强边缘连通的弱边缘,最终形成完整的边缘轮廓。例如,若弱边缘像素的邻域存在强边缘像素,则该弱边缘被保留,否则被删除,从而避免孤立噪声点被误判为边缘。
3 Canny算子的Python实现
OpenCV提供了cv2.Canny()函数,可直接调用实现Canny边缘检测。其核心参数为:
image:输入灰度图像;threshold1:低阈值(T1);threshold2:高阈值(T2);apertureSize:Sobel算子的孔径大小(默认3);L2gradient:是否使用L2范数计算梯度幅值(默认False,即使用L1范数∣Gx∣+∣Gy∣|G_x|+|G_y|∣Gx∣+∣Gy∣)。
代码示例:
# 读取图像并预处理
import cv2
import numpy as np
import matplotlib.pyplot as plt# 读取图像并转为RGB格式(用于显示)
img = cv2.imread('test_image.jpg') # 替换为实际图像路径
img_rgb = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)# 灰度化与高斯滤波
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
gaussian_blur = cv2.GaussianBlur(gray, (5, 5), 0) # 高斯核大小5x5,标准差0(自动计算)# Canny边缘检测(低阈值50,高阈值150)
canny_edges = cv2.Canny(gaussian_blur, threshold1=50, threshold2=150)# 显示结果
plt.figure(figsize=(10, 5))
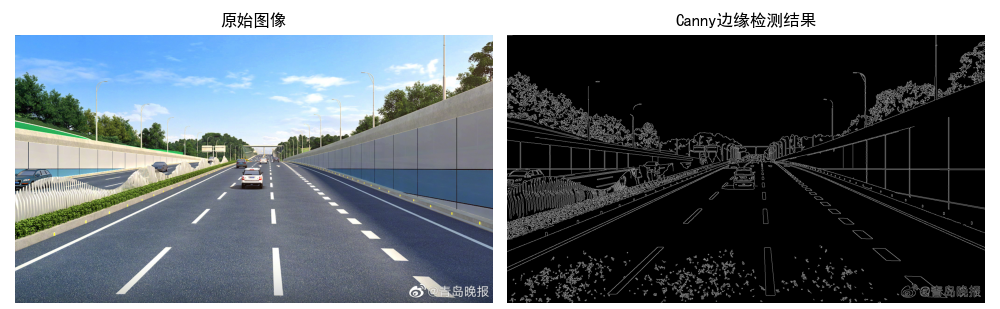
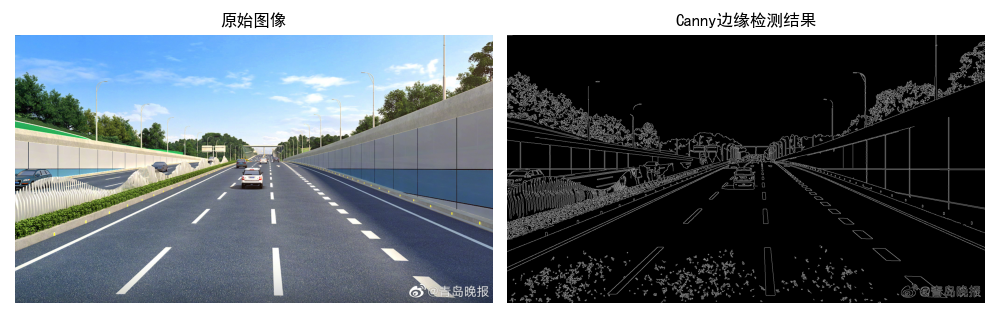
plt.subplot(121), plt.imshow(img_rgb), plt.title('原始图像'), plt.axis('off')
plt.subplot(122), plt.imshow(canny_edges, cmap='gray'), plt.title('Canny边缘检测结果'), plt.axis('off')
plt.tight_layout()
plt.show()
4 经典边缘检测算子性能对比实验
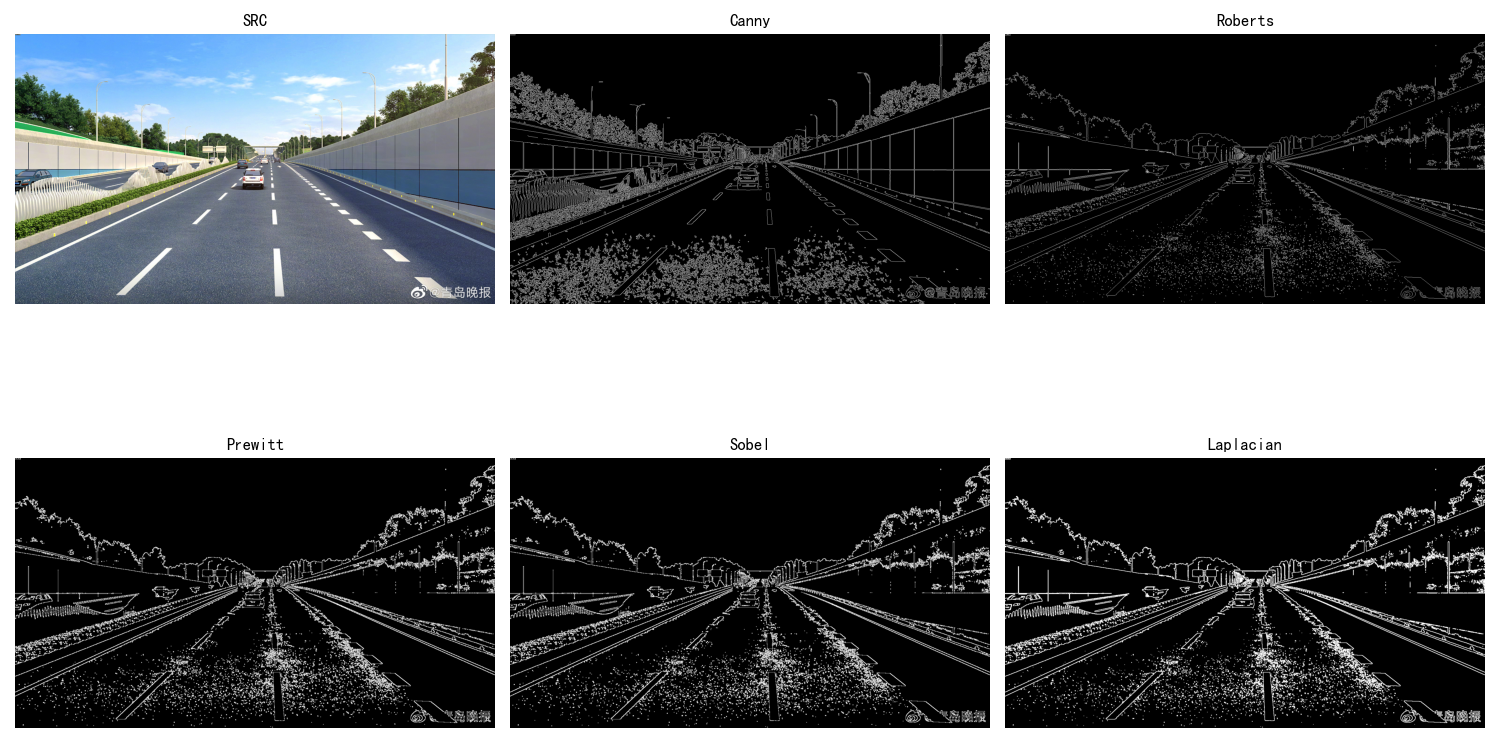
为验证Canny算子的优势,我们对比了Roberts、Prewitt、Sobel、Laplacian与Canny算子在相同图像上的检测效果。实验步骤如下:
- 对图像进行灰度化与高斯滤波(统一预处理);
- 分别用各算子提取边缘;
- 对比边缘完整性、连续性及抗噪声能力。
实验代码:
import cv2
import numpy as np; import matplotlib.pyplot as plt# 读取图像并预处理
img = cv2.imread('test_image.jpg')
img_rgb = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
gaussian_blur = cv2.GaussianBlur(gray, (3, 3), 0) # 高斯滤波核3x3# 阈值化(用于Roberts/Prewitt/Sobel/Laplacian)
ret, binary = cv2.threshold(gaussian_blur, 127, 255, cv2.THRESH_BINARY)# 定义各算子的卷积核
roberts_kernels = [np.array([[-1, 0], [0, 1]]), np.array([[0, -1], [1, 0]])]
prewitt_kernels = [np.array([[1, 1, 1], [0, 0, 0], [-1, -1, -1]]), np.array([[-1, 0, 1], [-1, 0, 1], [-1, 0, 1]])]
sobel_kernels = [np.array([[-1, 0, 1], [-2, 0, 2], [-1, 0, 1]]), np.array([[-1, -2, -1], [0, 0, 0], [1, 2, 1]])]# 计算各算子结果
def apply_kernel(binary, kernel_x, kernel_y):x = cv2.filter2D(binary, cv2.CV_16S, kernel_x)y = cv2.filter2D(binary, cv2.CV_16S, kernel_y)return cv2.addWeighted(cv2.convertScaleAbs(x), 0.5, cv2.convertScaleAbs(y), 0.5, 0)roberts = apply_kernel(binary, roberts_kernels[0], roberts_kernels[1])
prewitt = apply_kernel(binary, prewitt_kernels[0], prewitt_kernels[1])
sobel = apply_kernel(binary, sobel_kernels[0], sobel_kernels[1])
laplacian = cv2.convertScaleAbs(cv2.Laplacian(binary, cv2.CV_16S, ksize=3))
canny = cv2.Canny(gaussian_blur, 50, 150)# 显示对比结果
plt.figure(figsize=(15, 10))
titles = ['原始图像', 'Canny算子', 'Roberts算子', 'Prewitt算子', 'Sobel算子', 'Laplacian算子']
images = [img_rgb, canny, roberts, prewitt, sobel, laplacian]
for i in range(6):plt.subplot(2, 3, i+1), plt.imshow(images[i], 'gray'), plt.title(titles[i]), plt.axis('off')
plt.tight_layout()
plt.show()
实验结果分析
- Roberts算子:核大小仅2x2,对细节敏感但抗噪声能力弱,边缘易断开;
- Prewitt算子:3x3核平滑效果更好,边缘较连续,但边缘略粗;
- Sobel算子:加权核优化了噪声影响,边缘连续性和清晰度优于Prewitt;
- Laplacian算子:无方向选择性,易产生双像素边缘,且噪声放大明显;
- Canny算子:通过高斯滤波去噪、非极大值抑制细化边缘、双阈值与滞后跟踪筛选,最终边缘更连续、单像素宽,且抗噪声能力最强,是实际应用中的首选。
5 总结
Canny边缘检测算法通过五个关键步骤,在低错误率、高定位性和最小响应三个标准上实现了最优边缘检测。其核心优势在于对噪声的鲁棒性、对边缘的精确定位及边缘连续性的保障,广泛应用于目标识别、图像分割、特征提取等计算机视觉领域。通过Python+OpenCV实现时,合理调整高斯核大小、双阈值参数,可进一步优化检测效果。