C# OpenCVSharp实现Hand Pose Estimation Mediapipe
OpenCV模型库中有个手势识别的例子,是python版本的,路径是opencv_zoo-main\models\handpose_estimation_mediapipe,现将该例子改写,用OpenCVSharp实现,不依赖其他库,只需要安装OpenCVSharp即可。模型在GitHub,OpenCV官方模型库下载。
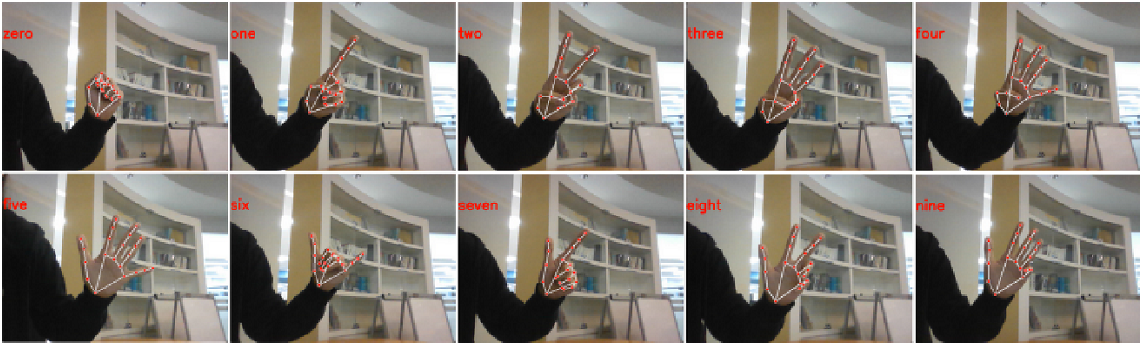
官方效果:
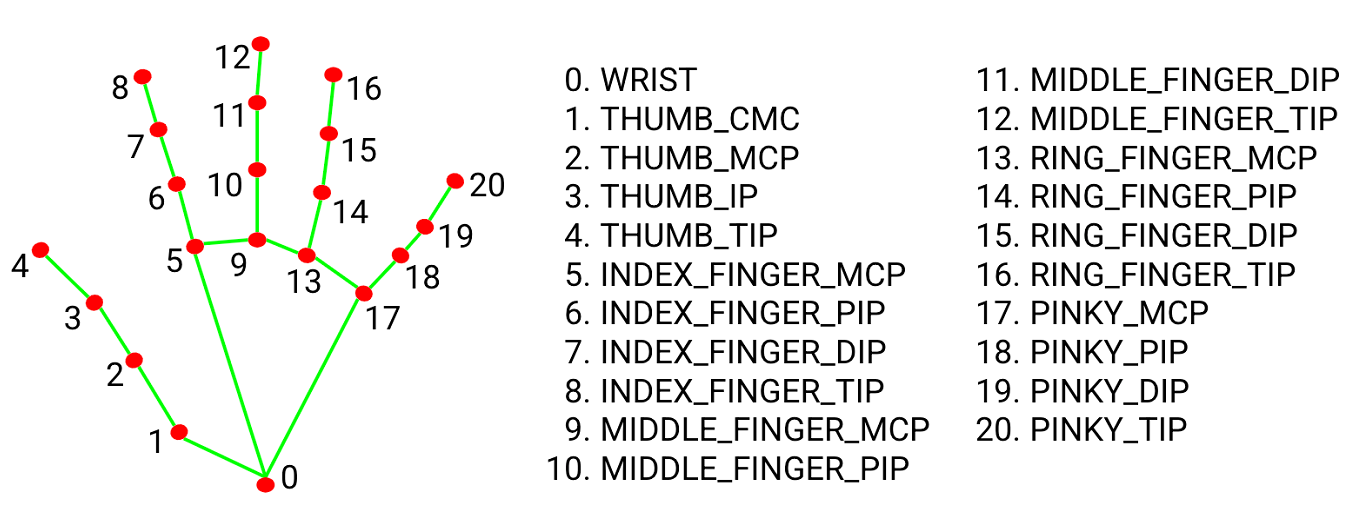
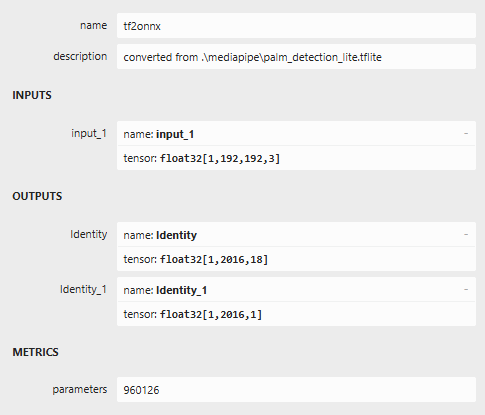
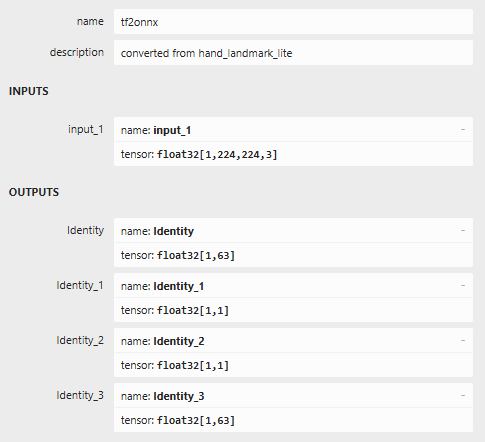
需要用到两个模型,一个是手掌检测,确定手部方向,进行摆正,一个是手部关键点检测
代码如下:
///PalmDetector.cs
using OpenCvSharp;
using OpenCvSharp.Dnn;
using System;
using System.Collections.Generic;
using System.Linq;
using System.Runtime.InteropServices;
using Point = OpenCvSharp.Point;
using Scalar = OpenCvSharp.Scalar;
using Size = OpenCvSharp.Size;
namespace yolo_world_opencvsharp_net4._8
{
public class PalmDetector : IDisposable
{
private string model_path;
private float nms_threshold;
private float score_threshold;
private int topK;
private int backend_id;
private int target_id;
private Size input_size;
private Net model;
private List<Point2f> anchors;
private bool _disposed = false;
public PalmDetector(string modelPath, float nmsThreshold = 0.3f, float scoreThreshold = 0.5f,
int topK = 5000, Backend backend = Backend.OPENCV, Target target = Target.CPU)
{
model_path = modelPath;
nms_threshold = nmsThreshold;
score_threshold = scoreThreshold;
this.topK = topK;
input_size = new Size(192, 192);
// 加载模型
model = CvDnn.ReadNetFromOnnx(model_path);
if (model.Empty())
{
throw new ArgumentException($"Failed to load model from {modelPath}");
}
model.SetPreferableBackend(backend);
model.SetPreferableTarget(target);
anchors = MPPalmAnchors.LoadAnchors();
Console.WriteLine($"PalmDetector initialized with {anchors?.Count ?? 0} anchors");
}
public List<List<float>> Infer(Mat image)
{
if (image == null || image.Empty())
throw new ArgumentException("Input image is null or empty");
var (preprocessed_image, pad_bias) = Preprocess(image);
try
{
model.SetInput(preprocessed_image);
var outputNames = model.GetUnconnectedOutLayersNames();
Mat[] outputs = outputNames.Select(_ => new Mat()).ToArray();
model.Forward(outputs, outputNames);
return Postprocess(outputs, image.Size(), pad_bias);
}
finally
{
preprocessed_image?.Dispose();
}
}
public Mat Visualize(Mat image, List<List<float>> results, bool print_results = false, float fps = 0.0f)
{
Mat output = image.Clone();
if (fps > 0)
{
Cv2.PutText(output, $"FPS: {fps:F1}", new Point(10, 30),
HersheyFonts.HersheySimplex, 0.7, new Scalar(0, 0, 255), 2);
}
for (int i = 0; i < results.Count; i++)
{
List<float> result = results[i];
if (result.Count < 19) continue; // 4 box + 14 landmarks + 1 score
float score = result[result.Count - 1];
// Draw bounding box
Cv2.Rectangle(
output,
new Point((int)result[0], (int)result[1]),
new Point((int)result[2], (int)result[3]),
new Scalar(0, 255, 0), 2);
// Draw confidence score
Cv2.PutText(output, $"{score:F3}",
new Point((int)result[0], (int)result[1] - 10),
HersheyFonts.HersheySimplex, 0.5, new Scalar(0, 255, 0), 1);
// Draw landmarks with different colors
Scalar[] landmarkColors = new Scalar[]
{
new Scalar(255, 0, 0), // Blue
new Scalar(0, 255, 255), // Yellow
new Scalar(255, 0, 255), // Magenta
new Scalar(0, 255, 0), // Green
new Scalar(255, 255, 0), // Cyan
new Scalar(128, 0, 128), // Purple
new Scalar(0, 165, 255) // Orange
};
for (int j = 0; j < 7; j++)
{
Point point = new Point((int)result[4 + j * 2], (int)result[4 + j * 2 + 1]);
Cv2.Circle(output, point, 4, landmarkColors[j], -1);
Cv2.Circle(output, point, 2, new Scalar(255, 255, 255), -1);
// Draw landmark number
Cv2.PutText(output, $"{j + 1}",
new Point(point.X + 6, point.Y - 6),
HersheyFonts.HersheySimplex, 0.4, new Scalar(255, 255, 255), 1);
}
if (print_results)
{
Console.WriteLine($"----------- Palm {i + 1} -----------");
Console.WriteLine($"Score: {score:F4}");
Console.WriteLine($"Box: [{result[0]:F0}, {result[1]:F0}, {result[2]:F0}, {result[3]:F0}]");
Console.WriteLine($"Box Size: {result[2] - result[0]:F0} x {result[3] - result[1]:F0}");
Console.WriteLine("Landmarks:");
for (int j = 0; j < 7; j++)
{
Console.WriteLine($" Point {j + 1}: ({result[4 + j * 2]:F0}, {result[4 + j * 2 + 1]:F0})");
}
Console.WriteLine();
}
}
return output;
}
private (Mat, Point) Preprocess(Mat image)
{
Point pad_bias = new Point(0, 0);
float ratio = Math.Min((float)input_size.Width / image.Width, (float)input_size.Height / image.Height);
Mat processed_image = new Mat();
if (image.Height != input_size.Height || image.Width != input_size.Width)
{
Size ratio_size = new Size((int)(image.Width * ratio), (int)(image.Height * ratio));
Cv2.Resize(image, processed_image, ratio_size, 0, 0, InterpolationFlags.Linear);
int pad_h = input_size.Height - ratio_size.Height;
int pad_w = input_size.Width - ratio_size.Width;
pad_bias.X = pad_w / 2;
pad_bias.Y = pad_h / 2;
Cv2.CopyMakeBorder(processed_image, processed_image, pad_bias.Y, pad_h - pad_bias.Y,
pad_bias.X, pad_w - pad_bias.X, BorderTypes.Constant, new Scalar(0, 0, 0));
}
else
{
processed_image = image.Clone();
}
// Create NHWC blob
processed_image.ConvertTo(processed_image, MatType.CV_32FC3, 1.0 / 255.0);
Cv2.CvtColor(processed_image, processed_image, ColorConversionCodes.BGR2RGB);
float[] imgData = new float[processed_image.Total() * processed_image.Channels()];
Marshal.Copy(processed_image.Data, imgData, 0, imgData.Length);
int[] dims = new int[] { 1, input_size.Height, input_size.Width, 3 };
Mat blob = new Mat(dims, MatType.CV_32FC1, imgData);
processed_image.Dispose();
// Adjust pad bias for original image coordinates
pad_bias.X = (int)(pad_bias.X / ratio);
pad_bias.Y = (int)(pad_bias.Y / ratio);
return (blob, pad_bias);
}
private List<List<float>> Postprocess(Mat[] output_blobs, Size original_size, Point pad_bias)
{
if (output_blobs.Length < 2)
return new List<List<float>>();
Mat scores = output_blobs[1].Reshape(1, (int)(output_blobs[1].Total()));
Mat boxes = output_blobs[0].Reshape(1, (int)(output_blobs[0].Total() / 18));
List<float> score_vec = new List<float>();
List<Rect2f> boxes_vec = new List<Rect2f>();
List<List<Point2f>> landmarks_vec = new List<List<Point2f>>();
float scale = Math.Max(original_size.Height, original_size.Width);
// Process all detections
for (int i = 0; i < scores.Rows; i++)
{
float score = 1.0f / (1.0f + (float)Math.Exp(-scores.At<float>(i, 0)));
if (score < score_threshold)
continue;
// Extract box and landmark deltas
var box_delta = boxes.Row(i).ColRange(0, 4);
var landmark_delta = boxes.Row(i).ColRange(4, 18);
var anchor = anchors[i];
// Decode bounding box coordinates
Point2f cxy_delta = new Point2f(
box_delta.At<float>(0, 0) / input_size.Width,
box_delta.At<float>(0, 1) / input_size.Height);
Point2f wh_delta = new Point2f(
box_delta.At<float>(0, 2) / input_size.Width,
box_delta.At<float>(0, 3) / input_size.Height);
// Calculate box coordinates
Point2f xy1 = new Point2f(
(cxy_delta.X - wh_delta.X / 2 + anchor.X) * scale - pad_bias.X,
(cxy_delta.Y - wh_delta.Y / 2 + anchor.Y) * scale - pad_bias.Y);
Point2f xy2 = new Point2f(
(cxy_delta.X + wh_delta.X / 2 + anchor.X) * scale - pad_bias.X,
(cxy_delta.Y + wh_delta.Y / 2 + anchor.Y) * scale - pad_bias.Y);
// Clip to image boundaries
xy1.X = Math.Max(0, Math.Min(original_size.Width - 1, xy1.X));
xy1.Y = Math.Max(0, Math.Min(original_size.Height - 1, xy1.Y));
xy2.X = Math.Max(0, Math.Min(original_size.Width - 1, xy2.X));
xy2.Y = Math.Max(0, Math.Min(original_size.Height - 1, xy2.Y));
// Only add valid detections
if (xy2.X > xy1.X && xy2.Y > xy1.Y && (xy2.X - xy1.X) > 20 && (xy2.Y - xy1.Y) > 20)
{
score_vec.Add(score);
boxes_vec.Add(new Rect2f(xy1.X, xy1.Y, xy2.X - xy1.X, xy2.Y - xy1.Y));
// Process landmarks
List<Point2f> landmarks = new List<Point2f>();
for (int j = 0; j < 7; j++)
{
float dx = landmark_delta.At<float>(0, j * 2) / input_size.Width + anchor.X;
float dy = landmark_delta.At<float>(0, j * 2 + 1) / input_size.Height + anchor.Y;
// Convert to original image coordinates
dx = dx * scale - pad_bias.X;
dy = dy * scale - pad_bias.Y;
// Clip to image boundaries
dx = Math.Max(0, Math.Min(original_size.Width - 1, dx));
dy = Math.Max(0, Math.Min(original_size.Height - 1, dy));
landmarks.Add(new Point2f(dx, dy));
}
landmarks_vec.Add(landmarks);
}
}
// Perform NMS
List<Rect> boxes_int = boxes_vec.Select(box =>
new Rect((int)box.X, (int)box.Y, (int)box.Width, (int)box.Height)).ToList();
CvDnn.NMSBoxes(boxes_int, score_vec, score_threshold, nms_threshold, out int[] indices);
// Prepare results
List<List<float>> results = new List<List<float>>();
foreach (int idx in indices)
{
List<float> result = new List<float>();
Rect2f box = boxes_vec[idx];
// Bounding box coordinates
result.Add(box.X);
result.Add(box.Y);
result.Add(box.X + box.Width);
result.Add(box.Y + box.Height);
// Landmark coordinates
foreach (Point2f point in landmarks_vec[idx])
{
result.Add(point.X);
result.Add(point.Y);
}
// Confidence score
result.Add(score_vec[idx]);
results.Add(result);
}
// Clean up
scores.Dispose();
boxes.Dispose();
return results;
}
public void Dispose()
{
Dispose(true);
GC.SuppressFinalize(this);
}
protected virtual void Dispose(bool disposing)
{
if (!_disposed)
{
if (disposing)
{
model?.Dispose();
}
_disposed = true;
}
}
~PalmDetector()
{
Dispose(false);
}
}
}
///MPHandPose.cs
using OpenCvSharp;
using OpenCvSharp.Dnn;
using System;
using System.Collections.Generic;
using System.Linq;
namespace yolo_world_opencvsharp_net4._8
{
public class MPHandPose : IDisposable
{
private string model_path;
private float conf_threshold;
private int backend_id;
private int target_id;
private Size input_size;
private Net model;
private bool _disposed = false;
// Constants from the Python version
private readonly int[] PALM_LANDMARK_IDS = { 0, 5, 9, 13, 17, 1, 2 };
private const int PALM_LANDMARKS_INDEX_OF_PALM_BASE = 0;
private const int PALM_LANDMARKS_INDEX_OF_MIDDLE_FINGER_BASE = 2;
private readonly double[] PALM_BOX_PRE_SHIFT_VECTOR = { 0, 0 };
private const double PALM_BOX_PRE_ENLARGE_FACTOR = 4;
private readonly double[] PALM_BOX_SHIFT_VECTOR = { 0, -0.4 };
private const double PALM_BOX_ENLARGE_FACTOR = 3;
private readonly double[] HAND_BOX_SHIFT_VECTOR = { 0, -0.1 };
private const double HAND_BOX_ENLARGE_FACTOR = 1.65;
public MPHandPose(string modelPath, float confThreshold = 0.8f, Backend backend = Backend.OPENCV, Target target = Target.CPU)
{
model_path = modelPath;
conf_threshold = confThreshold;
backend_id = (int)backend;
target_id = (int)target;
input_size = new Size(224, 224);
model = CvDnn.ReadNetFromOnnx(model_path);
if (model.Empty())
{
throw new ArgumentException($"Failed to load hand pose model from {modelPath}");
}
model.SetPreferableBackend(backend);
model.SetPreferableTarget(target);
Console.WriteLine($"MPHandPose initialized with input size: {input_size}");
}
public void SetBackendAndTarget(Backend backend, Target target)
{
backend_id = (int)backend;
target_id = (int)target;
model.SetPreferableBackend(backend);
model.SetPreferableTarget(target);
}
private (Mat, Rect, Point) CropAndPadFromPalm(Mat image, Rect palmBbox, bool forRotation = false)
{
// Shift bounding box
var whPalmBbox = new Point(palmBbox.Width, palmBbox.Height);
double[] shiftVector = forRotation ? PALM_BOX_PRE_SHIFT_VECTOR : PALM_BOX_SHIFT_VECTOR;
var shift = new Point(whPalmBbox.X * shiftVector[0], whPalmBbox.Y * shiftVector[1]);
var shiftedBbox = new Rect(
palmBbox.X + (int)shift.X,
palmBbox.Y + (int)shift.Y,
palmBbox.Width,
palmBbox.Height
);
// Enlarge bounding box
var centerPalmBbox = new Point(
shiftedBbox.X + shiftedBbox.Width / 2,
shiftedBbox.Y + shiftedBbox.Height / 2
);
double enlargeScale = forRotation ? PALM_BOX_PRE_ENLARGE_FACTOR : PALM_BOX_ENLARGE_FACTOR;
var newHalfSize = new Size(
(int)(whPalmBbox.X * enlargeScale / 2),
(int)(whPalmBbox.Y * enlargeScale / 2)
);
var enlargedBbox = new Rect(
centerPalmBbox.X - newHalfSize.Width,
centerPalmBbox.Y - newHalfSize.Height,
newHalfSize.Width * 2,
newHalfSize.Height * 2
);
// Clip to image boundaries
enlargedBbox.X = Math.Max(0, Math.Min(image.Width - 1, enlargedBbox.X));
enlargedBbox.Y = Math.Max(0, Math.Min(image.Height - 1, enlargedBbox.Y));
enlargedBbox.Width = Math.Min(enlargedBbox.Width, image.Width - enlargedBbox.X);
enlargedBbox.Height = Math.Min(enlargedBbox.Height, image.Height - enlargedBbox.Y);
// Crop to the size of interest
Mat croppedImage = new Mat(image, enlargedBbox);
// Pad to ensure corner pixels won't be cropped
int sideLen = forRotation ?
(int)Math.Sqrt(croppedImage.Width * croppedImage.Width + croppedImage.Height * croppedImage.Height) :
Math.Max(croppedImage.Width, croppedImage.Height);
int padH = sideLen - croppedImage.Height;
int padW = sideLen - croppedImage.Width;
int left = padW / 2;
int top = padH / 2;
int right = padW - left;
int bottom = padH - top;
Cv2.CopyMakeBorder(croppedImage, croppedImage, top, bottom, left, right, BorderTypes.Constant, Scalar.Black);
var bias = new Point(enlargedBbox.X - left, enlargedBbox.Y - top);
return (croppedImage, enlargedBbox, bias);
}
private (Mat, Rect, double, Mat, Point) Preprocess(Mat image, List<float> palm)
{
if (palm.Count < 18)
throw new ArgumentException("Palm data must contain at least 18 elements");
// Extract palm bounding box and landmarks
var palmBbox = new Rect(
(int)palm[0], (int)palm[1],
(int)(palm[2] - palm[0]),
(int)(palm[3] - palm[1])
);
// Crop and pad image to interest range
var (croppedImage, rotatedPalmBbox, bias) = CropAndPadFromPalm(image, palmBbox, true);
// Convert to RGB
Cv2.CvtColor(croppedImage, croppedImage, ColorConversionCodes.BGR2RGB);
// Extract palm landmarks
var palmLandmarks = new List<Point2f>();
for (int i = 0; i < 7; i++)
{
palmLandmarks.Add(new Point2f(
palm[4 + i * 2] - bias.X,
palm[4 + i * 2 + 1] - bias.Y
));
}
// Rotate input to have vertically oriented hand image
var p1 = palmLandmarks[PALM_LANDMARKS_INDEX_OF_PALM_BASE];
var p2 = palmLandmarks[PALM_LANDMARKS_INDEX_OF_MIDDLE_FINGER_BASE];
double radians = Math.PI / 2 - Math.Atan2(-(p2.Y - p1.Y), p2.X - p1.X);
radians = radians - 2 * Math.PI * Math.Floor((radians + Math.PI) / (2 * Math.PI));
double angle = radians * (180.0 / Math.PI);
// Get bbox center
var centerPalmBbox = new Point2f(
rotatedPalmBbox.X + rotatedPalmBbox.Width / 2.0f - bias.X,
rotatedPalmBbox.Y + rotatedPalmBbox.Height / 2.0f - bias.Y
);
// Get rotation matrix (注意:这里返回的是CV_64FC1类型)
var rotationMatrix = Cv2.GetRotationMatrix2D(centerPalmBbox, angle, 1.0);
// Get rotated image
Mat rotatedImage = new Mat();
Cv2.WarpAffine(croppedImage, rotatedImage, rotationMatrix, new Size(croppedImage.Width, croppedImage.Height));
// Get rotated palm landmarks - 正确的方法
var rotatedPalmLandmarks = new List<Point2f>();
foreach (var landmark in palmLandmarks)
{
// 正确访问旋转矩阵的双精度元素
double r00 = rotationMatrix.At<double>(0, 0);
double r01 = rotationMatrix.At<double>(0, 1);
double r02 = rotationMatrix.At<double>(0, 2);
double r10 = rotationMatrix.At<double>(1, 0);
double r11 = rotationMatrix.At<double>(1, 1);
double r12 = rotationMatrix.At<double>(1, 2);
double rotatedX = r00 * landmark.X + r01 * landmark.Y + r02;
double rotatedY = r10 * landmark.X + r11 * landmark.Y + r12;
rotatedPalmLandmarks.Add(new Point2f((float)rotatedX, (float)rotatedY));
}
// Get landmark bounding box
float minX = rotatedPalmLandmarks.Min(p => p.X);
float minY = rotatedPalmLandmarks.Min(p => p.Y);
float maxX = rotatedPalmLandmarks.Max(p => p.X);
float maxY = rotatedPalmLandmarks.Max(p => p.Y);
var rotatedPalmBboxFinal = new Rect((int)minX, (int)minY, (int)(maxX - minX), (int)(maxY - minY));
// Final crop
var (finalCrop, finalBbox, _) = CropAndPadFromPalm(rotatedImage, rotatedPalmBboxFinal);
//Cv2.ImShow("123",finalCrop);
// Resize to model input size
Mat blob = new Mat();
Cv2.Resize(finalCrop, blob, input_size, 0, 0, InterpolationFlags.Area);
blob.ConvertTo(blob, MatType.CV_32FC3, 1.0 / 255.0);
// Add batch dimension
blob = blob.Reshape(1, new int[] { 1, input_size.Height, input_size.Width, 3 });
return (blob, finalBbox, angle, rotationMatrix, bias);
}
public List<float> Infer(Mat image, List<float> palm)
{
// Preprocess
var (inputBlob, rotatedPalmBbox, angle, rotationMatrix, padBias) = Preprocess(image, palm);
// Forward
model.SetInput(inputBlob);
var outputNames = model.GetUnconnectedOutLayersNames();
Mat[] outputs = outputNames.Select(_ => new Mat()).ToArray();
model.Forward(outputs, outputNames);
// Postprocess
var results = Postprocess(outputs, rotatedPalmBbox, angle, rotationMatrix, padBias);
// Clean up
inputBlob.Dispose();
foreach (var output in outputs)
{
output.Dispose();
}
return results;
}
private List<float> Postprocess(Mat[] outputs, Rect rotatedPalmBbox, double angle, Mat rotationMatrix, Point padBias)
{
if (outputs.Length < 4)
return null;
// Extract outputs
var landmarks = outputs[0].Reshape(1, 21, 3); // 21 landmarks, 3 coordinates each
var conf = outputs[1].At<float>(0, 0);
var handedness = outputs[2].At<float>(0, 0);
var landmarksWorld = outputs[3].Reshape(1, 21, 3);
if (conf < conf_threshold)
return null;
List<float> result = new List<float>();
// Transform coords back to the input coords
var whRotatedPalmBbox = new Point(rotatedPalmBbox.Width, rotatedPalmBbox.Height);
var scaleFactor = new Point2f(
whRotatedPalmBbox.X / (float)input_size.Width,
whRotatedPalmBbox.Y / (float)input_size.Height
);
float maxScale = Math.Max(scaleFactor.X, scaleFactor.Y);
// Scale landmarks
for (int i = 0; i < 21; i++)
{
landmarks.At<float>(i, 0) = (landmarks.At<float>(i, 0) - input_size.Width / 2.0f) * maxScale;
landmarks.At<float>(i, 1) = (landmarks.At<float>(i, 1) - input_size.Height / 2.0f) * maxScale;
landmarks.At<float>(i, 2) = landmarks.At<float>(i, 2) * maxScale; // depth scaling
}
// Rotate landmarks
var coordsRotationMatrix = Cv2.GetRotationMatrix2D(new Point2f(0, 0), -angle, 1.0);
// 正确访问坐标旋转矩阵的双精度元素
double cr00 = coordsRotationMatrix.At<double>(0, 0);
double cr01 = coordsRotationMatrix.At<double>(0, 1);
double cr10 = coordsRotationMatrix.At<double>(1, 0);
double cr11 = coordsRotationMatrix.At<double>(1, 1);
for (int i = 0; i < 21; i++)
{
float x = landmarks.At<float>(i, 0);
float y = landmarks.At<float>(i, 1);
landmarks.Set<float>(i, 0, (float)(cr00 * x + cr01 * y));
landmarks.Set<float>(i, 1, (float)(cr10 * x + cr11 * y));
}
// Invert rotation - 正确访问原始旋转矩阵的双精度元素
double r00 = rotationMatrix.At<double>(0, 0);
double r01 = rotationMatrix.At<double>(0, 1);
double r02 = rotationMatrix.At<double>(0, 2);
double r10 = rotationMatrix.At<double>(1, 0);
double r11 = rotationMatrix.At<double>(1, 1);
double r12 = rotationMatrix.At<double>(1, 2);
var rotationComponent = new double[2, 2] {
{ r00, r10 }, // 注意:转置矩阵
{ r01, r11 }
};
var translationComponent = new double[] { r02, r12 };
var invertedTranslation = new double[] {
-(rotationComponent[0, 0] * translationComponent[0] + rotationComponent[0, 1] * translationComponent[1]),
-(rotationComponent[1, 0] * translationComponent[0] + rotationComponent[1, 1] * translationComponent[1])
};
var inverseRotationMatrix = new Mat(2, 3, MatType.CV_64FC1);
inverseRotationMatrix.Set<double>(0, 0, rotationComponent[0, 0]);
inverseRotationMatrix.Set<double>(0, 1, rotationComponent[0, 1]);
inverseRotationMatrix.Set<double>(0, 2, invertedTranslation[0]);
inverseRotationMatrix.Set<double>(1, 0, rotationComponent[1, 0]);
inverseRotationMatrix.Set<double>(1, 1, rotationComponent[1, 1]);
inverseRotationMatrix.Set<double>(1, 2, invertedTranslation[1]);
// Get box center
var center = new Point2f(
rotatedPalmBbox.X + rotatedPalmBbox.Width / 2.0f,
rotatedPalmBbox.Y + rotatedPalmBbox.Height / 2.0f
);
// 使用逆旋转矩阵计算原始中心
double ir00 = inverseRotationMatrix.At<double>(0, 0);
double ir01 = inverseRotationMatrix.At<double>(0, 1);
double ir02 = inverseRotationMatrix.At<double>(0, 2);
double ir10 = inverseRotationMatrix.At<double>(1, 0);
double ir11 = inverseRotationMatrix.At<double>(1, 1);
double ir12 = inverseRotationMatrix.At<double>(1, 2);
var originalCenter = new Point2f(
(float)(ir00 * center.X + ir01 * center.Y + ir02),
(float)(ir10 * center.X + ir11 * center.Y + ir12)
);
// Transform landmarks back to original coordinates
for (int i = 0; i < 21; i++)
{
landmarks.Set<float>(i, 0, landmarks.At<float>(i, 0) + originalCenter.X + padBias.X);
landmarks.Set<float>(i, 1, landmarks.At<float>(i, 1) + originalCenter.Y + padBias.Y);
}
// Get bounding box from landmarks
float minX = float.MaxValue, minY = float.MaxValue, maxX = float.MinValue, maxY = float.MinValue;
for (int i = 0; i < 21; i++)
{
minX = Math.Min(minX, landmarks.At<float>(i, 0));
minY = Math.Min(minY, landmarks.At<float>(i, 1));
maxX = Math.Max(maxX, landmarks.At<float>(i, 0));
maxY = Math.Max(maxY, landmarks.At<float>(i, 1));
}
var bbox = new Rect((int)minX, (int)minY, (int)(maxX - minX), (int)(maxY - minY));
// Shift bounding box
var shiftVector = new Point(
(int)(bbox.Width * HAND_BOX_SHIFT_VECTOR[0]),
(int)(bbox.Height * HAND_BOX_SHIFT_VECTOR[1])
);
bbox.X += shiftVector.X;
bbox.Y += shiftVector.Y;
// Enlarge bounding box
var centerBbox = new Point(bbox.X + bbox.Width / 2, bbox.Y + bbox.Height / 2);
var newHalfSize = new Size(
(int)(bbox.Width * HAND_BOX_ENLARGE_FACTOR / 2),
(int)(bbox.Height * HAND_BOX_ENLARGE_FACTOR / 2)
);
bbox = new Rect(
centerBbox.X - newHalfSize.Width,
centerBbox.Y - newHalfSize.Height,
newHalfSize.Width * 2,
newHalfSize.Height * 2
);
// Prepare final result
// [0-3]: hand bounding box
result.Add(bbox.X);
result.Add(bbox.Y);
result.Add(bbox.X + bbox.Width);
result.Add(bbox.Y + bbox.Height);
// [4-66]: screen landmarks (21 landmarks * 3 coordinates)
for (int i = 0; i < 21; i++)
{
result.Add(landmarks.At<float>(i, 0));
result.Add(landmarks.At<float>(i, 1));
result.Add(landmarks.At<float>(i, 2));
}
// [67-129]: world landmarks (21 landmarks * 3 coordinates)
for (int i = 0; i < 21; i++)
{
result.Add(landmarksWorld.At<float>(i, 0));
result.Add(landmarksWorld.At<float>(i, 1));
result.Add(landmarksWorld.At<float>(i, 2));
}
// [130]: handedness
result.Add(handedness);
// [131]: confidence
result.Add(conf);
return result;
}
public void Dispose()
{
Dispose(true);
GC.SuppressFinalize(this);
}
protected virtual void Dispose(bool disposing)
{
if (!_disposed)
{
if (disposing)
{
model?.Dispose();
}
_disposed = true;
}
}
~MPHandPose()
{
Dispose(false);
}
}
}
///HandPoseVisualizer
using OpenCvSharp;
using System;
using System.Collections.Generic;
using System.Linq;
namespace yolo_world_opencvsharp_net4._8
{
public static class HandPoseVisualizer
{
public static (Mat, Mat) Visualize(Mat image, List<List<float>> hands, bool printResult = false)
{
Mat displayScreen = image.Clone();
Mat display3d = new Mat(400, 400, MatType.CV_8UC3, Scalar.Black);
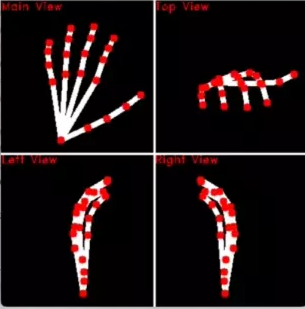
// Draw 3D view axes
Cv2.Line(display3d, new Point(200, 0), new Point(200, 400), new Scalar(255, 255, 255), 2);
Cv2.Line(display3d, new Point(0, 200), new Point(400, 200), new Scalar(255, 255, 255), 2);
Cv2.PutText(display3d, "Main View", new Point(0, 12), HersheyFonts.HersheyDuplex, 0.5, new Scalar(0, 0, 255));
Cv2.PutText(display3d, "Top View", new Point(200, 12), HersheyFonts.HersheyDuplex, 0.5, new Scalar(0, 0, 255));
Cv2.PutText(display3d, "Left View", new Point(0, 212), HersheyFonts.HersheyDuplex, 0.5, new Scalar(0, 0, 255));
Cv2.PutText(display3d, "Right View", new Point(200, 212), HersheyFonts.HersheyDuplex, 0.5, new Scalar(0, 0, 255));
bool isDraw = false; // ensure only one hand is drawn
// Gesture classification
var gestureClassifier = new GestureClassification();
for (int idx = 0; idx < hands.Count; idx++)
{
var handpose = hands[idx];
if (handpose.Count < 132) continue;
float conf = handpose[131];
var bbox = new Rect(
(int)handpose[0], (int)handpose[1],
(int)(handpose[2] - handpose[0]),
(int)(handpose[3] - handpose[1])
);
float handedness = handpose[130];
string handednessText = handedness <= 0.5f ? "Left" : "Right";
// Extract landmarks
var landmarksScreen = new List<Point>();
for (int i = 0; i < 21; i++)
{
landmarksScreen.Add(new Point(
(int)handpose[4 + i * 3],
(int)handpose[4 + i * 3 + 1]
));
}
var landmarksWorld = new List<Point3f>();
for (int i = 0; i < 21; i++)
{
landmarksWorld.Add(new Point3f(
handpose[67 + i * 3],
handpose[67 + i * 3 + 1],
handpose[67 + i * 3 + 2]
));
}
// Classify gesture
string gesture = gestureClassifier.Classify(landmarksScreen);
// Print results
if (printResult)
{
Console.WriteLine($"-----------hand {idx + 1}-----------");
Console.WriteLine($"conf: {conf:F2}");
Console.WriteLine($"handedness: {handednessText}");
Console.WriteLine($"gesture: {gesture}");
Console.WriteLine($"hand box: [{bbox.X}, {bbox.Y}, {bbox.X + bbox.Width}, {bbox.Y + bbox.Height}]");
Console.WriteLine("hand landmarks: ");
for (int i = 0; i < landmarksScreen.Count; i++)
{
Console.WriteLine($"\t[{landmarksScreen[i].X}, {landmarksScreen[i].Y}, {handpose[4 + i * 3 + 2]:F2}]");
}
}
// Draw bounding box
Cv2.Rectangle(displayScreen, bbox, new Scalar(0, 255, 0), 2);
// Draw handedness and gesture
Cv2.PutText(displayScreen, handednessText, new Point(bbox.X, bbox.Y + 12),
HersheyFonts.HersheyDuplex, 0.5, new Scalar(0, 0, 255));
Cv2.PutText(displayScreen, gesture, new Point(bbox.X, bbox.Y + 30),
HersheyFonts.HersheyDuplex, 0.5, new Scalar(0, 0, 255));
// Draw hand skeleton
DrawHandSkeleton(displayScreen, landmarksScreen, false);
// Draw landmarks with depth-based size
for (int i = 0; i < landmarksScreen.Count; i++)
{
float depth = handpose[4 + i * 3 + 2];
int radius = Math.Max(5 - (int)(depth / 5), 0);
radius = Math.Min(radius, 14);
Cv2.Circle(displayScreen, landmarksScreen[i], radius, new Scalar(0, 0, 255), -1);
}
// Draw 3D views (only for first hand)
if (!isDraw)
{
isDraw = true;
Draw3DViews(display3d, landmarksWorld);
}
}
return (displayScreen, display3d);
}
private static void DrawHandSkeleton(Mat image, List<Point> landmarks, bool drawPoints = true, int thickness = 2)
{
// Define connections between landmarks
var connections = new List<(int, int)>
{
(0, 1), (1, 2), (2, 3), (3, 4), // Thumb
(0, 5), (5, 6), (6, 7), (7, 8), // Index finger
(0, 9), (9, 10), (10, 11), (11, 12), // Middle finger
(0, 13), (13, 14), (14, 15), (15, 16), // Ring finger
(0, 17), (17, 18), (18, 19), (19, 20) // Pinky finger
};
// Draw connections
foreach (var (start, end) in connections)
{
if (start < landmarks.Count && end < landmarks.Count)
{
Cv2.Line(image, landmarks[start], landmarks[end], new Scalar(255, 255, 255), thickness);
}
}
// Draw points
if (drawPoints)
{
foreach (var point in landmarks)
{
Cv2.Circle(image, point, thickness, new Scalar(0, 0, 255), -1);
}
}
}
private static void Draw3DViews(Mat display3d, List<Point3f> landmarksWorld)
{
// Main view (XY plane)
var landmarksXY = landmarksWorld.Select(p => new Point(
(int)(p.X * 1000 + 100),
(int)(p.Y * 1000 + 100)
)).ToList();
DrawHandSkeleton(display3d, landmarksXY, false, 5);
// Top view (XZ plane)
var landmarksXZ = landmarksWorld.Select(p => new Point(
(int)(p.X * 1000 + 300),
(int)(-p.Z * 1000 + 100)
)).ToList();
DrawHandSkeleton(display3d, landmarksXZ, false, 5);
// Left view (ZY plane)
var landmarksZY = landmarksWorld.Select(p => new Point(
(int)(-p.Z * 1000 + 100),
(int)(p.Y * 1000 + 300)
)).ToList();
DrawHandSkeleton(display3d, landmarksZY, false, 5);
// Right view (YZ plane)
var landmarksYZ = landmarksWorld.Select(p => new Point(
(int)(p.Z * 1000 + 300),
(int)(p.Y * 1000 + 300)
)).ToList();
DrawHandSkeleton(display3d, landmarksYZ, false, 5);
}
}
}
///GestureClassification.cs
using OpenCvSharp;
using System;
using System.Collections.Generic;
using System.Linq;
namespace yolo_world_opencvsharp_net4._8
{
public class GestureClassification
{
private double Vector2Angle(Point v1, Point v2)
{
double normV1 = Math.Sqrt(v1.X * v1.X + v1.Y * v1.Y);
double normV2 = Math.Sqrt(v2.X * v2.X + v2.Y * v2.Y);
if (normV1 == 0 || normV2 == 0) return 0;
double dotProduct = v1.X * v2.X + v1.Y * v2.Y;
double cosAngle = dotProduct / (normV1 * normV2);
cosAngle = Math.Max(-1, Math.Min(1, cosAngle)); // Clamp to avoid floating point errors
double angle = Math.Acos(cosAngle) * (180.0 / Math.PI);
return angle;
}
private List<double> HandAngle(List<Point> hand)
{
var angleList = new List<double>();
// thumb
var angle1 = Vector2Angle(
new Point(hand[0].X - hand[2].X, hand[0].Y - hand[2].Y),
new Point(hand[3].X - hand[4].X, hand[3].Y - hand[4].Y)
);
angleList.Add(angle1);
// index
var angle2 = Vector2Angle(
new Point(hand[0].X - hand[6].X, hand[0].Y - hand[6].Y),
new Point(hand[7].X - hand[8].X, hand[7].Y - hand[8].Y)
);
angleList.Add(angle2);
// middle
var angle3 = Vector2Angle(
new Point(hand[0].X - hand[10].X, hand[0].Y - hand[10].Y),
new Point(hand[11].X - hand[12].X, hand[11].Y - hand[12].Y)
);
angleList.Add(angle3);
// ring
var angle4 = Vector2Angle(
new Point(hand[0].X - hand[14].X, hand[0].Y - hand[14].Y),
new Point(hand[15].X - hand[16].X, hand[15].Y - hand[16].Y)
);
angleList.Add(angle4);
// pinky
var angle5 = Vector2Angle(
new Point(hand[0].X - hand[18].X, hand[0].Y - hand[18].Y),
new Point(hand[19].X - hand[20].X, hand[19].Y - hand[20].Y)
);
angleList.Add(angle5);
return angleList;
}
private List<bool> FingerStatus(List<Point> landmarks)
{
var fingerList = new List<bool>();
var origin = landmarks[0];
var keypointList = new List<(int, int)> { (5, 4), (6, 8), (10, 12), (14, 16), (18, 20) };
foreach (var (point1, point2) in keypointList)
{
var p1 = landmarks[point1];
var p2 = landmarks[point2];
double dist1 = Math.Sqrt(Math.Pow(p1.X - origin.X, 2) + Math.Pow(p1.Y - origin.Y, 2));
double dist2 = Math.Sqrt(Math.Pow(p2.X - origin.X, 2) + Math.Pow(p2.Y - origin.Y, 2));
fingerList.Add(dist2 > dist1);
}
return fingerList;
}
private string ClassifyGesture(List<Point> hand)
{
double thrAngle = 65.0;
double thrAngleThumb = 30.0;
double thrAngleS = 49.0;
string gestureStr = "Undefined";
var angleList = HandAngle(hand);
var fingerStatus = FingerStatus(hand);
bool thumbOpen = fingerStatus[0];
bool firstOpen = fingerStatus[1];
bool secondOpen = fingerStatus[2];
bool thirdOpen = fingerStatus[3];
bool fourthOpen = fingerStatus[4];
// Number gestures
if (angleList[0] > thrAngleThumb && angleList[1] > thrAngle && angleList[2] > thrAngle &&
angleList[3] > thrAngle && angleList[4] > thrAngle &&
!firstOpen && !secondOpen && !thirdOpen && !fourthOpen)
{
gestureStr = "Zero";
}
else if (angleList[0] > thrAngleThumb && angleList[1] < thrAngleS && angleList[2] > thrAngle &&
angleList[3] > thrAngle && angleList[4] > thrAngle &&
firstOpen && !secondOpen && !thirdOpen && !fourthOpen)
{
gestureStr = "One";
}
else if (angleList[0] > thrAngleThumb && angleList[1] < thrAngleS && angleList[2] < thrAngleS &&
angleList[3] > thrAngle && angleList[4] > thrAngle &&
!thumbOpen && firstOpen && secondOpen && !thirdOpen && !fourthOpen)
{
gestureStr = "Two";
}
else if (angleList[0] > thrAngleThumb && angleList[1] < thrAngleS && angleList[2] < thrAngleS &&
angleList[3] < thrAngleS && angleList[4] > thrAngle &&
!thumbOpen && firstOpen && secondOpen && thirdOpen && !fourthOpen)
{
gestureStr = "Three";
}
else if (angleList[0] > thrAngleThumb && angleList[1] < thrAngleS && angleList[2] < thrAngleS &&
angleList[3] < thrAngleS && angleList[4] < thrAngle &&
firstOpen && secondOpen && thirdOpen && fourthOpen)
{
gestureStr = "Four";
}
else if (angleList[0] < thrAngleS && angleList[1] < thrAngleS && angleList[2] < thrAngleS &&
angleList[3] < thrAngleS && angleList[4] < thrAngleS &&
thumbOpen && firstOpen && secondOpen && thirdOpen && fourthOpen)
{
gestureStr = "Five";
}
// Add more gesture classifications as needed...
return gestureStr;
}
public string Classify(List<Point> landmarks)
{
if (landmarks.Count < 21) return "Undefined";
return ClassifyGesture(landmarks);
}
}
}
使用方法示例:
private void button3_Click(object sender, EventArgs e)
{
// 使用手部Pose检测的完整流程
string palmModelPath = @"D:\opencvsharp\1\opencv_zoo-main\opencv_zoo-main\models\palm_detection_mediapipe\palm_detection_mediapipe_2023feb.onnx";
string handPoseModelPath = @"D:\opencvsharp\1\opencv_zoo-main\opencv_zoo-main\models\handpose_estimation_mediapipe\handpose_estimation_mediapipe_2023feb.onnx";
using (var palmDetector = new PalmDetector(palmModelPath, 0.3f, 0.5f))
using (var handPoseDetector = new MPHandPose(handPoseModelPath, 0.7f))
using (var capture = new VideoCapture(0))
{
while (true)
{
using (var frame = new Mat())
{
capture.Read(frame);
if (frame.Empty()) break;
// 手掌检测
var palms = palmDetector.Infer(frame);
var hands = new List<List<float>>();
// 对每个检测到的手掌进行姿态估计
foreach (var palm in palms)
{
var handPose = handPoseDetector.Infer(frame, palm);
if (handPose != null && handPose.Count >= 132)
{
hands.Add(handPose);
}
}
// 可视化结果
var (displayScreen, display3d) = HandPoseVisualizer.Visualize(frame, hands);
Cv2.ImShow("Hand Pose Detection", displayScreen);
Cv2.ImShow("3D Hand Pose", display3d);
displayScreen.Dispose();
display3d.Dispose();
if (Cv2.WaitKey(1) >= 0) break;
}
}
}
}