Robotiq 2F-85/2F-140夹爪:为具身智能科研搭建物理交互核心硬件支撑

具身智能从虚拟仿真迈向物理落地的核心卡点,在于机器人能否精准应对真实世界的不确定性 —— 从异形物体抓取到力控精度适配,从算法快速迭代到长期实验稳定。Robotiq 自适应二指夹爪 2F-85 与 2F-140,正以 “感知 - 执行 - 兼容” 三位一体的核心能力,成为打通这一鸿沟的关键硬件:它既带着工业级的稳定表现扛住高频次实验损耗,又以科研友好的开放特性适配算法迭代,让虚拟世界的智能模型能在物理场景中稳健落地。

核心优势:为具身智能研究量身打造
Robotiq二指夹爪的核心价值在于其开箱即用的完整解决方案特性:
- 即插即用集成:支持UR、Franka等主流协作机器人官方平台,提供完整的ROS驱动支持
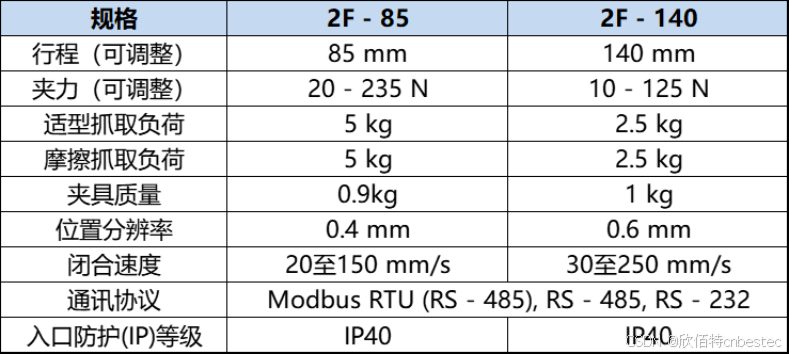
- 自适应抓取能力:2F-85提供85mm行程和20-235N可调夹力,2F-140提供140mm行程和10-125N可调夹力
- 精准力控反馈:内置力感测功能,位置分辨率达0.4mm(2F-85)/0.6mm(2F-140)
- 工业级可靠性:IP40防护等级,确保长期稳定运行

具身智能研究应用场景:
1. 仿真到现实的迁移验证
利用官方提供的数字孪生模型,研究人员可在NVIDIA Isaac Sim、MuJoCo等平台中进行算法训练,然后通过2F夹爪实现无缝的现实世界迁移。其一致性和可靠性确保了仿真结果的有效转化。
2. 多模态学习研究
配合视觉传感器,2F夹爪的力控特性为跨模态学习提供了理想平台。例如:
- 视觉-触觉融合:研究如何结合图像信息和力反馈数据提升抓取成功率
- 零样本抓取:基于夹爪的自适应能力,实现未知物体的安全抓取
- 精细操作学习:通过力控实现插拔、旋转等需要触觉反馈的复杂任务
3. 机器人抓取算法研究
利用Robotiq夹爪的自适应抓取能力,研究人员可以专注于抓取策略、力控算法等核心问题的研究,而无需担心硬件稳定性问题。
4. 长期自主学习研究
Robotiq二指夹爪的的耐用性(可承受数百万次操作)支持长期、大规模的自主学习实验。研究人员可进行:
- 持续强化学习训练,逐步提升抓取策略
- 跨任务迁移学习,验证算法的泛化能力
- 真实环境下的长期性能评估
5. 人机协作研究
在社交机器人、康复机器人等需要人机交互的场景中,2F-85/2F-140夹爪的力控特性确保交互过程的安全性,为紧密人机协作提供硬件基础。
6. 野外环境自适应抓取
在农业、救援等非结构化场景中,2F-140凭借其强大的适应能力,可有效抓取形状不规则、表面粗糙的物体,如水果、岩石等,推动具身智能在真实环境中的应用。

Robotiq 2F-85/2F-140二指夹爪以其工业级的可靠性和科研友好性,正成为全球具身智能实验室的优选硬件设备。无论是基础算法验证还是前沿应用探索,这些经过实践检验的"智能手"都能为研究提供坚实支撑。
开始使用Robotiq构建您的下一代具身智能研究平台,让算法可靠地触碰真实世界。
欢迎关注 “欣佰特科技” ,持续为大家带来 “具身智能领域”前沿技术及应用!