拓扑排序深入
拓扑排序
文章目录
- 拓扑排序
- 一、前言
- 二、拓扑排序
- 2.1 导入
- 2.1.1 有向无环图
- 2.1.2 活动
- 2.1.3 A O V AOV AOV网
- 2.1.4 拓扑序列
- 2.2 拓扑排序
- 2.2.1 定义
- 2.2.2 思想
- 2.2.3 步骤
- 2.2.4 图示模拟
- 2.2.5 代码
- 三、小结
一、前言
今天带来图的另外一种算法——拓扑排序。可是这和我们常见的排序一样吗?在图中有怎样的新的表达呢?
二、拓扑排序
在图中的拓扑排序当然和线性结构的排序(冒泡/快速/交换等)完全不同。
它的存在受制于图,也被图赋予了特殊的含义,在现实生活中也表现出独特的性质。
比如说,在工程中,必须先有需求分析,才能制作功能流程图,其次设计架构,最后才可以进行项目开发。每件事情并非独立,而是具有一定的先后次序的;还有在闯关游戏中,必须通过当前关卡的游戏才能解锁下一关一样,关卡的设置和游戏的难易程度相关)。
拓扑排序的出现就是为了找到一种合理的完成事情的顺序。
当然这只是拓扑排序的物理含义,抽象成模型是怎样的呢?
2.1 导入
2.1.1 有向无环图
拓扑排序的抽象模型就是有向无环图。
相信经过图的概述一篇,你肯定已经明白了有向无环图的定义。
放个图。

为什么一定是有向无环图呢?
使事情具有先后顺序(优先级),这不就是有向图吗?为什么是无环?这是为了保证顺序的可行性,防止形成死锁。
那如何判断一个图有没有环呢?
在 K r u s k a l Kruskal Kruskal算法中,我们曾使用并查集来排除成环的可能性
在这里有了一种新的方式。(先卖个关子~)
2.1.2 活动
每一个小步骤就是一个活动(在图中就是顶点)。
2.1.3 A O V AOV AOV网
A c t i v i t y Activity Activity O n On On V e r t e x Vertex Vertex N e t w o r k Network Network,在一个图中,顶点表示活动,弧(有方向的边)表示活动的优先关系,称为 A O V AOV AOV网。
活动的优先关系:弧尾的活动完成之后,才能去完成弧头的活动。
2.1.4 拓扑序列
一个路径中,有顶点在前,有顶点在后,从而形成的有顺序的顶点排列就是拓扑序列。
2.2 拓扑排序
2.2.1 定义
对一个有向无环图进行顶点的序列化处理
2.2.2 思想
对于一组有先后依赖关系的任务(或节点),找到一个线性的执行序列,使得任何任务都不会在其所依赖的所有前置任务完成之前开始。
如图:
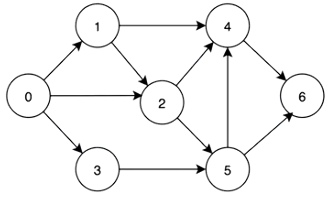
阐释:
一眼看过去。只有0没有依赖项,于是从0开始。0任务结束后,1,3都可以进行了。2为什么不行呢?2可是有两个依赖指向呢——0和1,必须0和1都完成才可以进行任务2。就这样,依次类推。
2.2.3 步骤
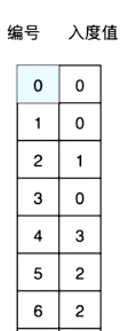
所谓依赖就是入度,因此拓扑排序核心为维护入度数组。
-
找到图中,入度为0的顶点,把这些顶点放入缓存区(栈/队列)
一开始,一定有一个入度为0的顶点,是整个任务的伊始。
这里的缓存区,我们采用栈。栈只需维护一个栈顶指针,但是队列需要维护队首和队尾两个指针。
-
从缓存区中取出一个顶点,放入结果集,这个顶点的任务执行完毕
-
顶点的出度对应的其余顶点的入度清零——解放依赖
-
在清零的过程中,查找入度为0的顶点(两个事同时进行),如果有,继续放入缓存区(推进任务进度)
-
重复2,3,4
-
缓存区为空时,结果集中的顶点个数和实际图中顶点的个数,如果相等(任务都顺利完成啦),则没有环(判断成环的方法)
2.2.4 图示模拟
既然是有向图,存储结构首选邻接表(这里是正邻接表)
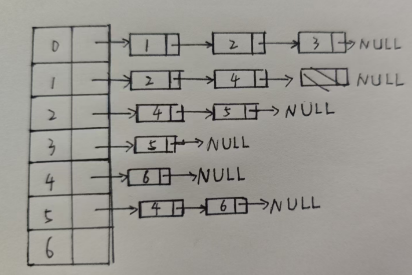
既然要找入度为0的顶点,不能一遍又一遍地遍历邻接表,因此,不如只遍历一遍得到一个入度记录表,当想找入度为0的点时,只需遍历一遍入度记录表更好(可以用优先级队列),这样效率更高一些。

栈结构

模拟:
- 找到入度为0的点,入栈

- 出栈
- 清零入度表
- 继续入栈(和上一步是同时进行的)
- 循环上述操作
2.2.5 代码
拓扑排序基于邻接表实现,先前已经实现了邻接表,在这里不再赘述了,直接采用其接口,详情见邻接表
// 拓扑排序,返回1表示有向无环,0表示无环,-1表示错误
int TopologicalSortAGraph(const AGraph *adjacencyList) // 排序无需改变邻接表-const
{// 准备工作// 定义一个入度记录表,便于发现入度为0时,放入缓存区int *inDegree;inDegree = malloc(sizeof(int) * graph->nodeNum);if(inDegree == NULL){return -1;}memset(inDegree, 0, sizeof(int) * graph->nodeNum);// 初始化入度记录表// 遍历邻接表for(int i = 0; i < graph->nodeNum; i++){if(graph->nodes[i].firstEdge) // 说明i节点开始有边{ArcEdge *edge = graph->nodes[i].firstEdge;while(edge){++inDegree[edge->no];edge = edge->next;}}}// 查找入度记录表,度为0的顶点,设计一个链式栈的缓存区,更新入度记录表时,发现0,就放入任务栈// 设计栈int *stack = malloc(sizeof(int) * graph->nodeNum);if(stack == NULL){free(inDegree);return -1;}int top = -1;// 入栈for(int i = 0; i < graph->nodeNum; ++i){if(inDegree[i] == 0){stack[++top] = i;}}// 根据任务栈里的数据,弹出第一个任务,这个任务对应的节点相关的入边个数删除// 更新任务记录表,如果更新过程中,发现入度为0,直接入栈int index;while(top != -1){index = stack[top--];count++;visitAGraphNode(&graph->nodes[index]);// 更新入度信息ArcEdge *edge = graph->nodes[index];while(edge){--inDegree[edge->no];if(inDegree[edge->no] == 0){stack[++top] = edge->no;}edge = edge->next;}}// 释放free(inDegree);free(stack);// 判断是否有环if(count == graph->nodeNum){return 0;}else{return 1;}
}
三、小结
所谓拓扑排序,不过是将生活中的事件抽象成一个物理模型,从而解决更多复杂的问题——关于将大事件拆分成小活动(步骤)完成,找到小活动的优先顺序,从而更加高效地解决问题。
这为我们的生活提供了 不少启示,不是吗?
下一篇,我将介绍一种图的新的应用,让我们一起揭开图更多的秘密吧~